一致性共识算法
参考:分布式一致性算法应用场景,写了为什么需要共识算法,以及相比于mysql这些主从同步方式的区别。
raft算法简介
一种分布式一致性共识算法的实现方式,机制相比于其它例如paxos来说无论从可读性还是实现机制上要简单很多,并且可以证明其正确性。raft论文只提出想法与证明,具体实现参考官网下面的Where can I get Raft?章节,包含了各种语言的实现。golang最出名的raft算法实现就是etcd团队开源的。
raft算法将集群划分为一主多从,由主节点接收写操作,所以包含了集群自动选主,如果暂时没有选出主节点,集群是不可用状态,等待选出主节点(一般几百ms内就可以选出主节点)。
主节点负责写操作,并将写操作广播给集群来让半数以上节点保存写操作日志,一旦半数同意,就可以
raft算法核心机制
每个节点拥有一个任期term属性
任期term是个数字,可以认为是王朝代号,每次发起选举自增,follower追随者使用leader主节点的任期
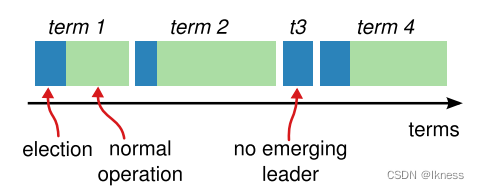
自动选主-保证有主节点对外提供服务
- 每个节点初始都是follower追随者状态,开启一个选举超时定时器(一般大于给集群广播消息消耗时间,例如内网100ms-300ms),定时器到了还没收到leader心跳消息,就认为leader死了,自己变成candidate发起选举
- candidate给集群广播要票消息,带上自己当前任期和最新日志索引
- follower收到要票消息,只要对方任期比自己大且最新日志索引index都和自己一样或者新(raft叫isUpToDate逻辑),并且先来后到没给别人投过票,就直接投票给对方,candidate收集到半数以上投票就变为leader,或者收集到半数以上拒绝或者超时(例如100-300ms)还没统计完投票就变为follower继续开启走心跳监测
- leader定时给集群发送心跳广播维持自己的统治

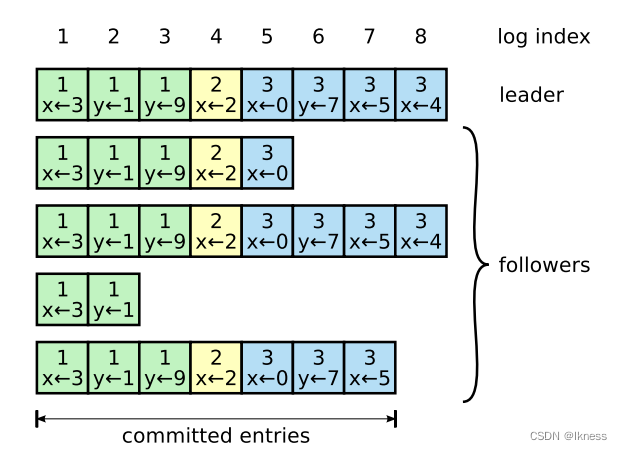
日志同步
每个提议开始都由leader发起,leader变为日志条目提交,所以每个日志有个自增索引号,与leader所处任期term。
follower需要与主节点leader保持日志条目统一,raft强制让follower纠正自己的日志来保持和leader一致,具体做法为:
- leader维持了每个follower的日志索引进度,初始等于leader自己的进度,用心跳消息带上维持的follower进度来探测对方进度,对方只要响应不一致,就递减这个进度并带上follower的进度与leader自己的进度之间的日志条目发送给对方继续探测,直到和对方一致。leader会将半数节点都达到的索引处及之前的日志认为已提交成功
- follower收到心跳消息,比对对方记录的进度的日志索引和任期是否和自己当前记录的一致,一致就将日志条目追加到自己记录上,否则拒绝leader同步让leader再递减索引来探测
leader发起提议(写操作)
提议由leader处理,leader会将提议追加到提议日志目录中,所以每个提议日志条目都有自增索引号,任期term+索引index可以确定一个条目,具体操作:
- leader收到写操作提议,将提议打包成日志条目追加到自己的条目进度里,走上面日志同步 流程来保持日志进度一致
raft算法额外机制
核心机制便于理解raft如何做到共识,而额外机制保证raft算法达到一致性
leader必须提交一笔空写操作
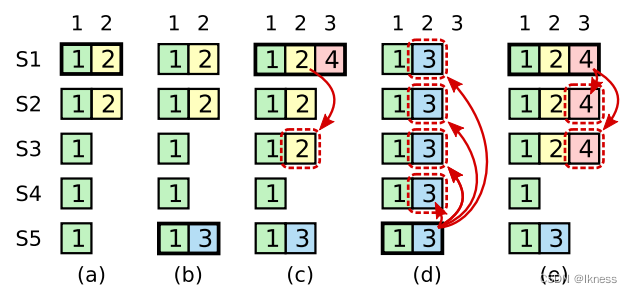
如果没有这个机制,会像上图所示:
- (a)时期:如果S1选为leader,向集群复制日志2
- (b)时期:S1崩溃,此时S5选为leader,准备给集群复制日志3
- (c)时期:S5还没来得及复制日志3,也崩溃了,S1重新选为leader,重新发起复制日志2并且接收了日志4,在同步给节点S3后又崩溃了
- (d)时期:S5重新选为leader会要求整个集群应用自己的日志3,但明明©时期S1已经复制了半数日志给集群了,日志2被错误覆盖
- (e)时期:如果S1当选能立即提交一个日志4的空操作给半数集群,那么S5是无法获得投票再次当选的,因为任期数小于半数集群认同的任期
这种机制防止了一些崩溃或者网络分区的情况下,旧leader通过旧任期覆盖一些新数据引起线性一致性问题
follower每次随机一个检查心跳超时时间
节点初始都是follower状态,如果一起启动,用一个选举超时时间,会一起变为candidate参与竞选,大家瓜分选票导致竞选失败再次超时重来无限循环。
因此raft规定follower每次检查心跳超时的时间随机等待,防止同时产生竞选。
遵循:broadcastTime ≪ electionTimeout ≪ MTBF,即广播时间小于竞选超时时间小于节点系统不可用时间
已提交日志不能更改
raft算法将日志条目分为已提交段和未提交的临时段,上面的leader纠正follower日志也只能是未提交段
优化raft集群
通过以上说明只是完成了一个固定集群一致性共识,不是真实商用状态,存在诸多问题需要解决。
配置变更(增删节点)
真实环境动态改变节点不可避免,可以将配置变更也作为日志提交,并且新增的节点不参与集群选举
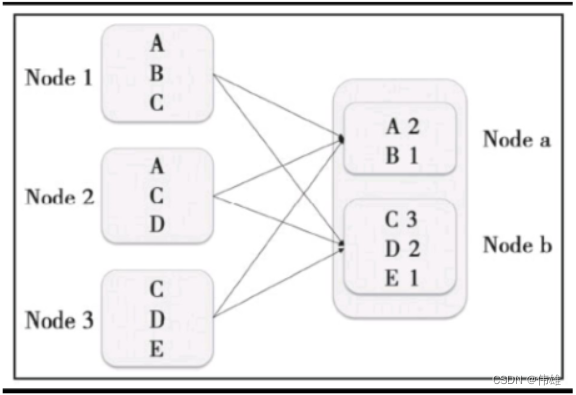
日志条目压缩
随着集群运行很久,日志条目越来越多,假如是个kv数据库,其实保存set key的最后一条写操作即可,因此每个节点可以单独生成已提交日志的快照后删除已提交条目,后续的日志同步涉及快照内的索引就直接以快照同步
处理读请求
将raft集群看成一个整体,写请求打到follower节点会被路由到leader节点处理,那么读请求呢?
假设客户端提交了一笔写操作马上来读这个操作的值,读到的值和写入的一样,这叫线性一致性。raft集群也要满足线性一致性。如果读请求由follower节点处理,可能follower还没接受到leader同步,数据落后;如果由leader处理,leader是保存当前最新的数据,但是读写都在leader又性能不好。
raft论文讨论了往leader节点读,但是有可能该leader是网络分区下的少数派,所以读之前leader要和集群广播确定和集群通信仍有效。
还有其它方法例如将读请求也作为一次提议,这样半数集群通过就可以直接返回数据。例如租约的形式让follower在选举超时内确认没发起竞选期间有处理读的权限,但是依赖时间比对逻辑,时钟可能发生回拨等存在不安全因素。
etcd实现的raft
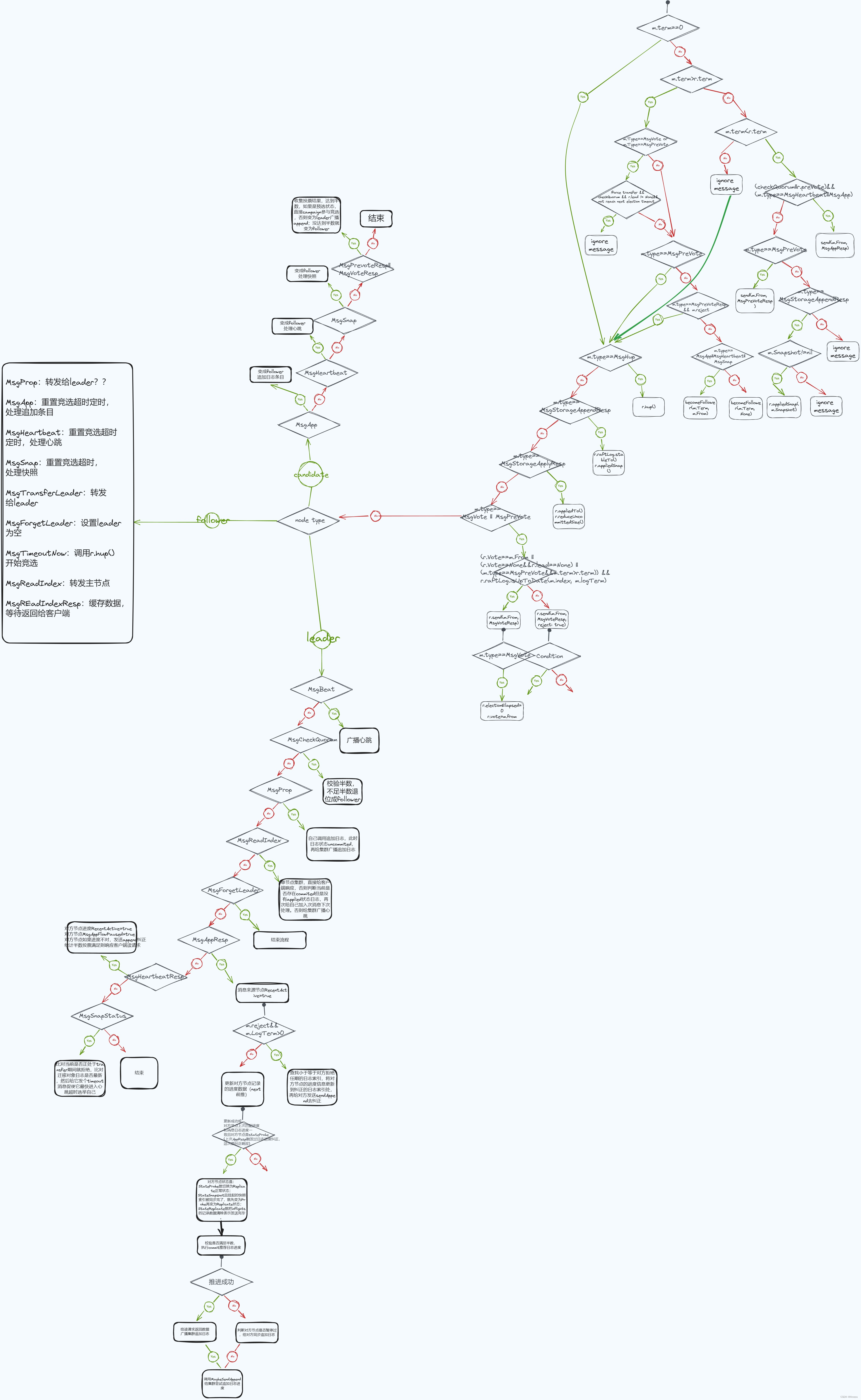
尝试读了下最新的etcd raft代码,太过于复杂,一个Step函数各种分支走法,于是切换到2.0.0版本学习了下。结合raft论文和etcd的写了个备忘项目:
golang raft (https://github.com/xlkness/lraft): 链接
以下是最新etcd raft Step方法: