最近想树莓派 Pico、DHT11 温湿度传感器和 SSD1306 OLED 屏幕做一个温度湿度计,树莓派官方案例也分别有这两个设备的案例,我就想做个简单的温度湿度计作为学习微控制器的开始,结果遇到了一个大坑,所以写本文记录一下整个过程。
本文最后会实现一个能在 SSD1306 OLED 屏幕上显示当前环境的温度和湿度,并且还要通过 USB 输出这些信息。
由于本文很长,建议通过侧边栏方便阅读。
本文的完整代码我放到了GitHub-ZhongUncle/pico-temp-hum-oled,并且在build目录下放了编译好的内容,方便读者进行尝试。
开发工具和环境准备
需要安装pico-sdk和配置相关环境变量。这部分请参阅我的另外一篇博客《如何使用Mac终端给树莓派pico构建C/C++程序进行开发,以及遇到各种问题该怎么处理,不使用任何IDE或编辑器(例如VS Code)》,这里就不再赘述了。
准备材料
实现这个需要以下材料:
- 树莓派 Pico 或 Pico W;
- SSD1306 OLED屏幕;
- DHT11 温湿度传感器;
- 导线若干;
- 面包板;
- 面包板电源(可选,因为传感器和屏幕的供电 Pico 就可以满足)。
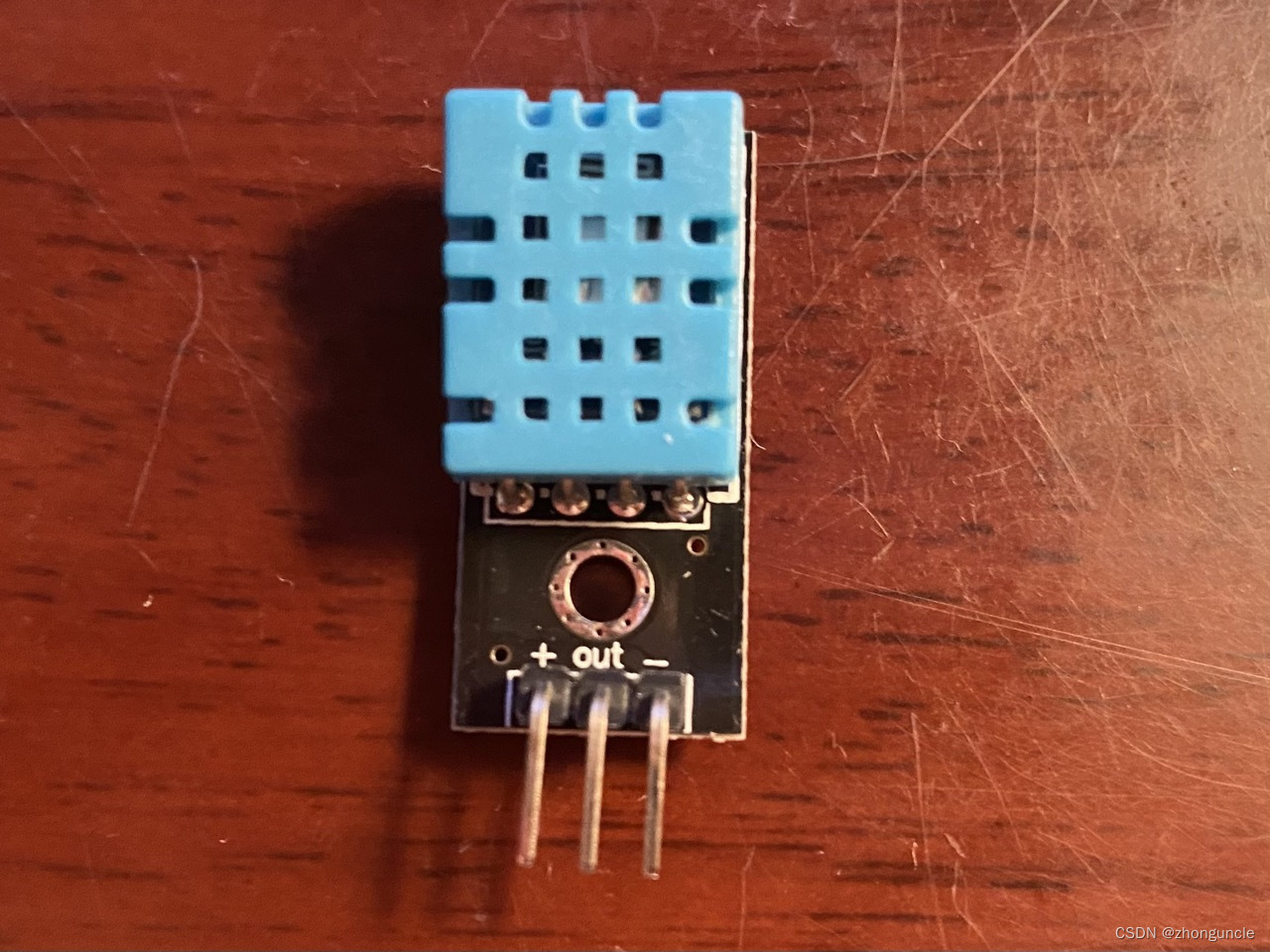
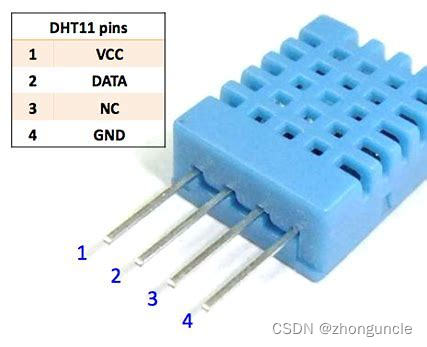
DHT11 的针脚有 3 针和 4 针两种:
如果是 4 针的,那么不连接针脚 3:
如果你看过官方文档或者其他一些教程,那么你会看到还需要一个电阻(10k 或 4.7k 欧姆)来拉取(pull up)数据线,但是这个电阻实际上不影响官方代码不能运行,实际正常运行也不需要,所以有没有这个电阻都可以。
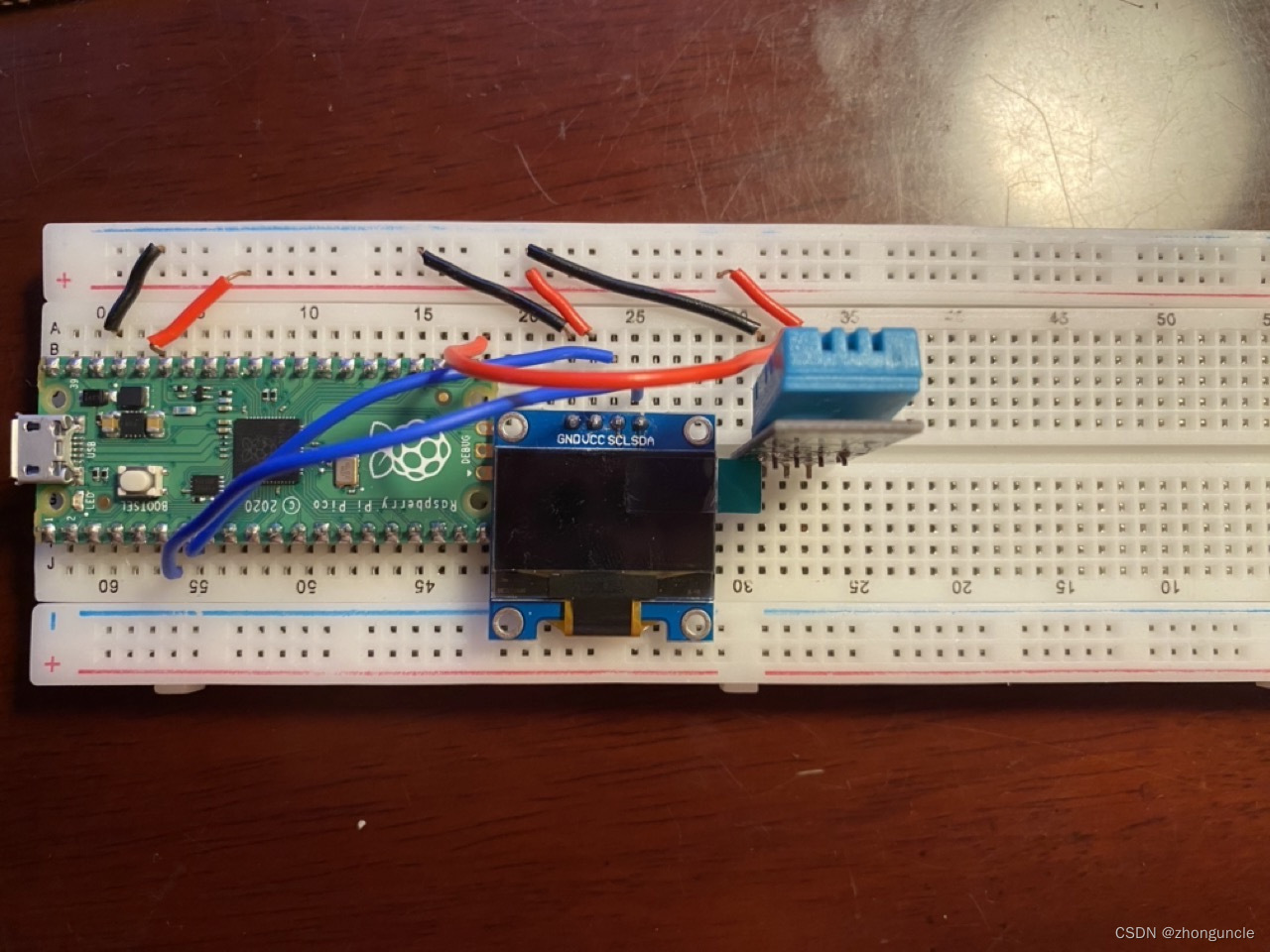
连线
Pico 的针脚图如下:
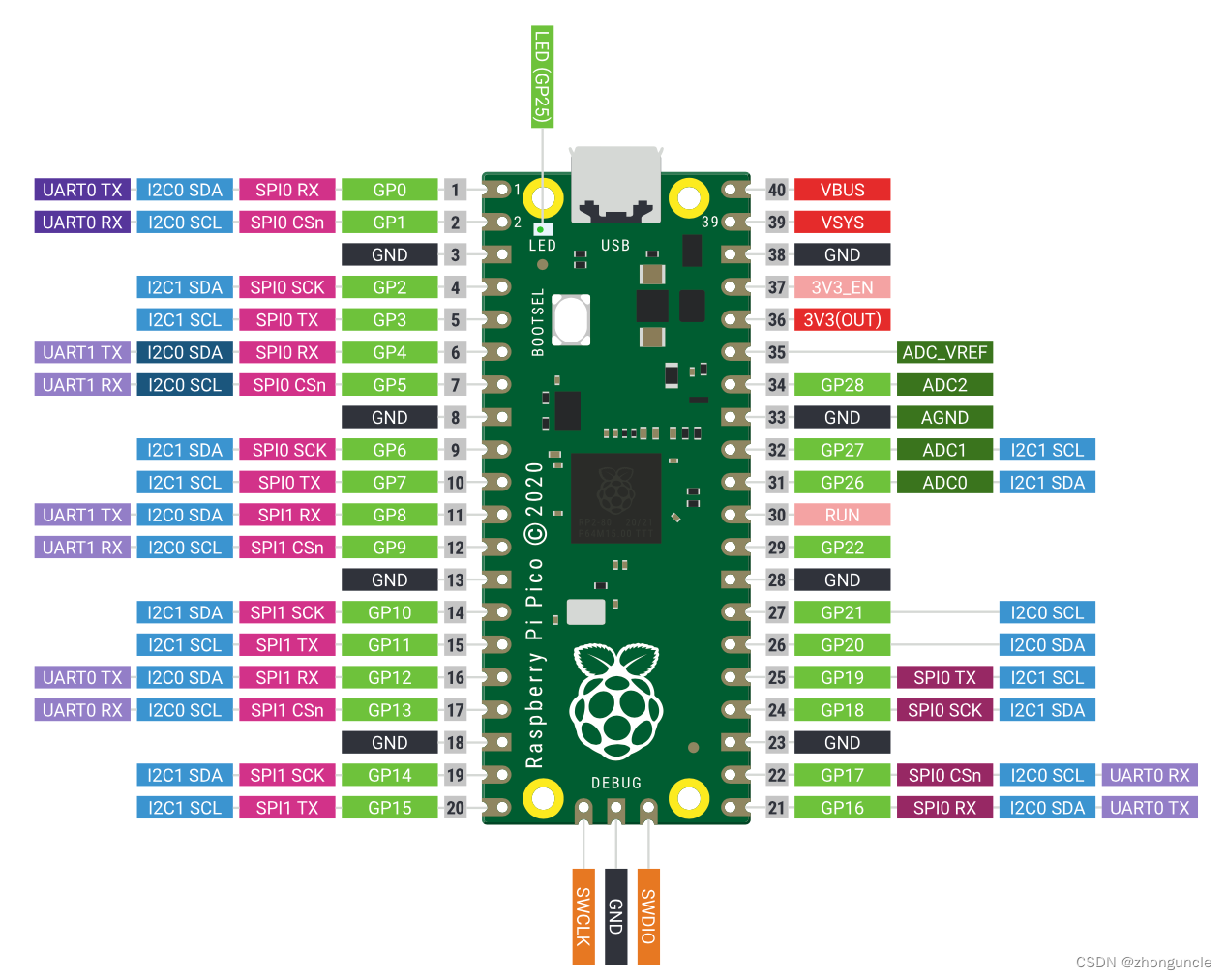
整个电路的电源通过 Pico 实现,使用 Pin 38 作为地线,Pin 36 作为电源线,3.3V 满足这两个传感器的需求。一般传感器上都标有电源和地线标识,所以这两种按照标识连接即可。
SSD1306 的SCL连接到 Pin 7,而SDA连接到 Pin 6。选择这两个针脚是因为这是 Pico 默认的 I2C 协议接口,而 SSD 1306 是按照 I2C 协议通信的。你也可以根据情况修改针脚,但本文并没有修改默认针脚。
修改默认针脚或者指定其他针脚方法可以看看我的这两篇博客,第一篇适合任何情况,比较通用,第二篇更适合只有一个 I2C 外围设备的情况:
- 《Pico如何使用C/C++选择使用哪个I2C控制器,以及SDA和SCL针脚》
- 《用C/C++修改I2C默认的SDA和SCL针脚》
如果你对 I2C 不了解,那么可以看看这篇介绍:BASICS OF THE I2C COMMUNICATION PROTOCOL
DHT11 的data针脚可以连接到 Pico 的任意 GP 针脚,推荐 GP15 或 GP16,因为这两个一般在面包板上离传感器近,需要的导线比较短。
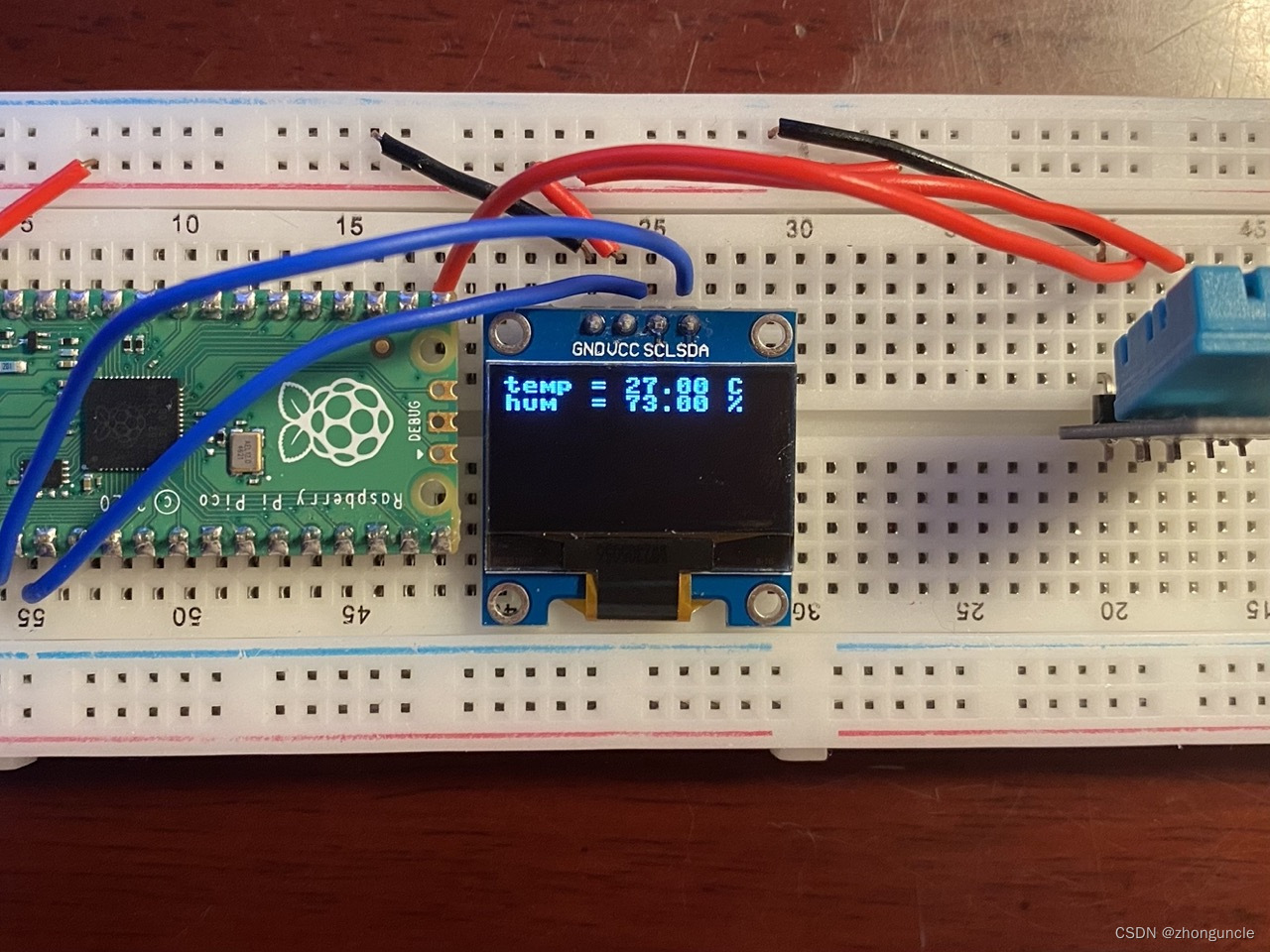
连接出来效果如下:
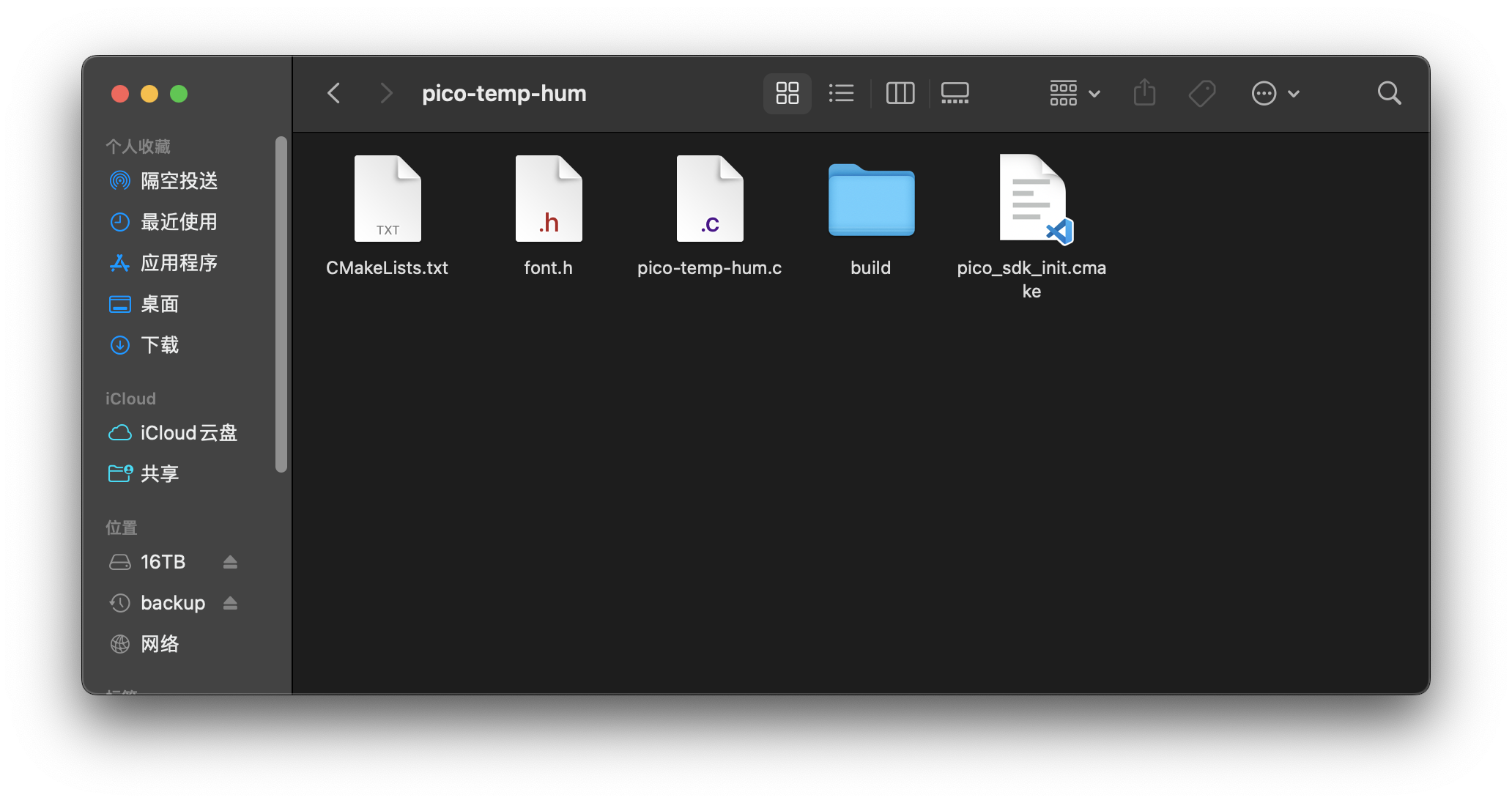
项目结构
本文中实现的项目我放到了 GitHub 上,你可以弄到本地看看效果。
新建一个文件夹pico-temp-hum,在里面新建 3 个文件font.h、pico-temp-hum.c、CMakeLists.txt和一个空白目录build,再将pico-sdk里的pico_sdk_import.cmake文件复制到这里。
$ mkdir pico-temp-hum
$ cd pico-temp-hum
$ touch font.h pico-temp-hum.c CMakeLists.txt
$ mkdir build
$ cp ../pico-sdk/pico_sdk_init.cmake pico_sdk_init.cmake
这时候项目结构看起来如下:
接下来就可以写代码了。
代码
font.h
首先是font.h文件,这里是存放字体信息的文件。
SSD1306 有两种版本:128x32 和 128x64,像素纵向按 8 行划分为多页(page)。比如上图中的 128x64 版本在 RAM 是下面这样排列的:
| COL0 | COL1 | COL2 | COL3 | ... | COL126 | COL127 |
PAGE 0 | | | | | | | |
PAGE 1 | | | | | | | |
PAGE 2 | | | | | | | |
PAGE 3 | | | | | | | |
PAGE 4 | | | | | | | |
PAGE 5 | | | | | | | |
PAGE 6 | | | | | | | |
PAGE 7 | | | | | | | |
--------------------------------------------------------------
在每个页内部如下(也就是按行和列确定像素):
| COL0 | COL1 | COL2 | COL3 | ... | COL126 | COL127 |
COM 0 | | | | | | | |
COM 1 | | | | | | | |
: | | | | | | | |
COM 7 | | | | | | | |
-------------------------------------------------------------
所以使用高度为 8 的字体比较好。这里我们使用 MicroPython 项目的字体,这种字体是 8x8
格式的,宽度和高度非常适合 SSD1306,因为 128 刚好是 8 的倍数。
在font.h中输入以下内容(毕竟这字体不是自己做的,还是不要删注释吧):
/** This file is part of the MicroPython project, http://micropython.org/** The MIT License (MIT)** Copyright (c) 2013, 2014 Damien P. George** Permission is hereby granted, free of charge, to any person obtaining a copy* of this software and associated documentation files (the "Software"), to deal* in the Software without restriction, including without limitation the rights* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell* copies of the Software, and to permit persons to whom the Software is* furnished to do so, subject to the following conditions:** The above copyright notice and this permission notice shall be included in* all copies or substantial portions of the Software.** THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN* THE SOFTWARE.*/
#ifndef MICROPY_INCLUDED_STM32_FONT_PETME128_8X8_H
#define MICROPY_INCLUDED_STM32_FONT_PETME128_8X8_Hstatic const uint8_t font[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // 32=0x00, 0x00, 0x00, 0x4f, 0x4f, 0x00, 0x00, 0x00, // 33=!0x00, 0x07, 0x07, 0x00, 0x00, 0x07, 0x07, 0x00, // 34="0x14, 0x7f, 0x7f, 0x14, 0x14, 0x7f, 0x7f, 0x14, // 35=#0x00, 0x24, 0x2e, 0x6b, 0x6b, 0x3a, 0x12, 0x00, // 36=$0x00, 0x63, 0x33, 0x18, 0x0c, 0x66, 0x63, 0x00, // 37=%0x00, 0x32, 0x7f, 0x4d, 0x4d, 0x77, 0x72, 0x50, // 38=&0x00, 0x00, 0x00, 0x04, 0x06, 0x03, 0x01, 0x00, // 39='0x00, 0x00, 0x1c, 0x3e, 0x63, 0x41, 0x00, 0x00, // 40=(0x00, 0x00, 0x41, 0x63, 0x3e, 0x1c, 0x00, 0x00, // 41=)0x08, 0x2a, 0x3e, 0x1c, 0x1c, 0x3e, 0x2a, 0x08, // 42=*0x00, 0x08, 0x08, 0x3e, 0x3e, 0x08, 0x08, 0x00, // 43=+0x00, 0x00, 0x80, 0xe0, 0x60, 0x00, 0x00, 0x00, // 44=,0x00, 0x08, 0x08, 0x08, 0x08, 0x08, 0x08, 0x00, // 45=-0x00, 0x00, 0x00, 0x60, 0x60, 0x00, 0x00, 0x00, // 46=.0x00, 0x40, 0x60, 0x30, 0x18, 0x0c, 0x06, 0x02, // 47=/0x00, 0x3e, 0x7f, 0x49, 0x45, 0x7f, 0x3e, 0x00, // 48=00x00, 0x40, 0x44, 0x7f, 0x7f, 0x40, 0x40, 0x00, // 49=10x00, 0x62, 0x73, 0x51, 0x49, 0x4f, 0x46, 0x00, // 50=20x00, 0x22, 0x63, 0x49, 0x49, 0x7f, 0x36, 0x00, // 51=30x00, 0x18, 0x18, 0x14, 0x16, 0x7f, 0x7f, 0x10, // 52=40x00, 0x27, 0x67, 0x45, 0x45, 0x7d, 0x39, 0x00, // 53=50x00, 0x3e, 0x7f, 0x49, 0x49, 0x7b, 0x32, 0x00, // 54=60x00, 0x03, 0x03, 0x79, 0x7d, 0x07, 0x03, 0x00, // 55=70x00, 0x36, 0x7f, 0x49, 0x49, 0x7f, 0x36, 0x00, // 56=80x00, 0x26, 0x6f, 0x49, 0x49, 0x7f, 0x3e, 0x00, // 57=90x00, 0x00, 0x00, 0x24, 0x24, 0x00, 0x00, 0x00, // 58=:0x00, 0x00, 0x80, 0xe4, 0x64, 0x00, 0x00, 0x00, // 59=;0x00, 0x08, 0x1c, 0x36, 0x63, 0x41, 0x41, 0x00, // 60=<0x00, 0x14, 0x14, 0x14, 0x14, 0x14, 0x14, 0x00, // 61==0x00, 0x41, 0x41, 0x63, 0x36, 0x1c, 0x08, 0x00, // 62=>0x00, 0x02, 0x03, 0x51, 0x59, 0x0f, 0x06, 0x00, // 63=?0x00, 0x3e, 0x7f, 0x41, 0x4d, 0x4f, 0x2e, 0x00, // 64=@0x00, 0x7c, 0x7e, 0x0b, 0x0b, 0x7e, 0x7c, 0x00, // 65=A0x00, 0x7f, 0x7f, 0x49, 0x49, 0x7f, 0x36, 0x00, // 66=B0x00, 0x3e, 0x7f, 0x41, 0x41, 0x63, 0x22, 0x00, // 67=C0x00, 0x7f, 0x7f, 0x41, 0x63, 0x3e, 0x1c, 0x00, // 68=D0x00, 0x7f, 0x7f, 0x49, 0x49, 0x41, 0x41, 0x00, // 69=E0x00, 0x7f, 0x7f, 0x09, 0x09, 0x01, 0x01, 0x00, // 70=F0x00, 0x3e, 0x7f, 0x41, 0x49, 0x7b, 0x3a, 0x00, // 71=G0x00, 0x7f, 0x7f, 0x08, 0x08, 0x7f, 0x7f, 0x00, // 72=H0x00, 0x00, 0x41, 0x7f, 0x7f, 0x41, 0x00, 0x00, // 73=I0x00, 0x20, 0x60, 0x41, 0x7f, 0x3f, 0x01, 0x00, // 74=J0x00, 0x7f, 0x7f, 0x1c, 0x36, 0x63, 0x41, 0x00, // 75=K0x00, 0x7f, 0x7f, 0x40, 0x40, 0x40, 0x40, 0x00, // 76=L0x00, 0x7f, 0x7f, 0x06, 0x0c, 0x06, 0x7f, 0x7f, // 77=M0x00, 0x7f, 0x7f, 0x0e, 0x1c, 0x7f, 0x7f, 0x00, // 78=N0x00, 0x3e, 0x7f, 0x41, 0x41, 0x7f, 0x3e, 0x00, // 79=O0x00, 0x7f, 0x7f, 0x09, 0x09, 0x0f, 0x06, 0x00, // 80=P0x00, 0x1e, 0x3f, 0x21, 0x61, 0x7f, 0x5e, 0x00, // 81=Q0x00, 0x7f, 0x7f, 0x19, 0x39, 0x6f, 0x46, 0x00, // 82=R0x00, 0x26, 0x6f, 0x49, 0x49, 0x7b, 0x32, 0x00, // 83=S0x00, 0x01, 0x01, 0x7f, 0x7f, 0x01, 0x01, 0x00, // 84=T0x00, 0x3f, 0x7f, 0x40, 0x40, 0x7f, 0x3f, 0x00, // 85=U0x00, 0x1f, 0x3f, 0x60, 0x60, 0x3f, 0x1f, 0x00, // 86=V0x00, 0x7f, 0x7f, 0x30, 0x18, 0x30, 0x7f, 0x7f, // 87=W0x00, 0x63, 0x77, 0x1c, 0x1c, 0x77, 0x63, 0x00, // 88=X0x00, 0x07, 0x0f, 0x78, 0x78, 0x0f, 0x07, 0x00, // 89=Y0x00, 0x61, 0x71, 0x59, 0x4d, 0x47, 0x43, 0x00, // 90=Z0x00, 0x00, 0x7f, 0x7f, 0x41, 0x41, 0x00, 0x00, // 91=[0x00, 0x02, 0x06, 0x0c, 0x18, 0x30, 0x60, 0x40, // 92='\'0x00, 0x00, 0x41, 0x41, 0x7f, 0x7f, 0x00, 0x00, // 93=]0x00, 0x08, 0x0c, 0x06, 0x06, 0x0c, 0x08, 0x00, // 94=^0xc0, 0xc0, 0xc0, 0xc0, 0xc0, 0xc0, 0xc0, 0xc0, // 95=_0x00, 0x00, 0x01, 0x03, 0x06, 0x04, 0x00, 0x00, // 96=`0x00, 0x20, 0x74, 0x54, 0x54, 0x7c, 0x78, 0x00, // 97=a0x00, 0x7f, 0x7f, 0x44, 0x44, 0x7c, 0x38, 0x00, // 98=b0x00, 0x38, 0x7c, 0x44, 0x44, 0x6c, 0x28, 0x00, // 99=c0x00, 0x38, 0x7c, 0x44, 0x44, 0x7f, 0x7f, 0x00, // 100=d0x00, 0x38, 0x7c, 0x54, 0x54, 0x5c, 0x58, 0x00, // 101=e0x00, 0x08, 0x7e, 0x7f, 0x09, 0x03, 0x02, 0x00, // 102=f0x00, 0x98, 0xbc, 0xa4, 0xa4, 0xfc, 0x7c, 0x00, // 103=g0x00, 0x7f, 0x7f, 0x04, 0x04, 0x7c, 0x78, 0x00, // 104=h0x00, 0x00, 0x00, 0x7d, 0x7d, 0x00, 0x00, 0x00, // 105=i0x00, 0x40, 0xc0, 0x80, 0x80, 0xfd, 0x7d, 0x00, // 106=j0x00, 0x7f, 0x7f, 0x30, 0x38, 0x6c, 0x44, 0x00, // 107=k0x00, 0x00, 0x41, 0x7f, 0x7f, 0x40, 0x00, 0x00, // 108=l0x00, 0x7c, 0x7c, 0x18, 0x30, 0x18, 0x7c, 0x7c, // 109=m0x00, 0x7c, 0x7c, 0x04, 0x04, 0x7c, 0x78, 0x00, // 110=n0x00, 0x38, 0x7c, 0x44, 0x44, 0x7c, 0x38, 0x00, // 111=o0x00, 0xfc, 0xfc, 0x24, 0x24, 0x3c, 0x18, 0x00, // 112=p0x00, 0x18, 0x3c, 0x24, 0x24, 0xfc, 0xfc, 0x00, // 113=q0x00, 0x7c, 0x7c, 0x04, 0x04, 0x0c, 0x08, 0x00, // 114=r0x00, 0x48, 0x5c, 0x54, 0x54, 0x74, 0x20, 0x00, // 115=s0x04, 0x04, 0x3f, 0x7f, 0x44, 0x64, 0x20, 0x00, // 116=t0x00, 0x3c, 0x7c, 0x40, 0x40, 0x7c, 0x3c, 0x00, // 117=u0x00, 0x1c, 0x3c, 0x60, 0x60, 0x3c, 0x1c, 0x00, // 118=v0x00, 0x1c, 0x7c, 0x30, 0x18, 0x30, 0x7c, 0x1c, // 119=w0x00, 0x44, 0x6c, 0x38, 0x38, 0x6c, 0x44, 0x00, // 120=x0x00, 0x9c, 0xbc, 0xa0, 0xa0, 0xfc, 0x7c, 0x00, // 121=y0x00, 0x44, 0x64, 0x74, 0x5c, 0x4c, 0x44, 0x00, // 122=z0x00, 0x08, 0x08, 0x3e, 0x77, 0x41, 0x41, 0x00, // 123={0x00, 0x00, 0x00, 0xff, 0xff, 0x00, 0x00, 0x00, // 124=|0x00, 0x41, 0x41, 0x77, 0x3e, 0x08, 0x08, 0x00, // 125=}0x00, 0x02, 0x03, 0x01, 0x03, 0x02, 0x03, 0x01, // 126=~0xaa, 0x55, 0xaa, 0x55, 0xaa, 0x55, 0xaa, 0x55, // 127
};#endif // MICROPY_INCLUDED_STM32_FONT_PETME128_8X8_H
我在参考 Mac OS 3.2 的系统字体创作字体,这种字体很好看,也是位图字体。我在实现了一些字母发现确实要比一些常见的字体好看的多,但是实现难度不小。因为这种字体的宽度和高度并不是 8 或 8 的倍数,所以需要做一些调整。如果搞定了,那么会替换上面和 GitHub 项目里的内容。
pico-temp-hum.c
头文件
首先是添加头文件:
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <ctype.h>
#include <math.h>
#include "pico/stdlib.h"
#include "hardware/i2c.h"
#include "hardware/gpio.h"
#include "ssd1306_font.h"
SSD1306相关代码
然后是添加一堆后面可能会使用到的宏,主要是 SSD1306 的命令。介绍还请看注释:
//根据你SSD1306的规格设置SSD1306_HEIGHT为32或64
#define SSD1306_HEIGHT 64
#define SSD1306_WIDTH 128#define SSD1306_I2C_ADDR _u(0x3C)//SSD1306时钟速率,一般是400000(40MHz),但是会有频闪现象,为了减缓频闪和提升响应速度,建议使用1000000(100MHz)
#define SSD1306_I2C_CLK 1000000//SSD1306的命令(更多可以参阅SSD1306数据表 https://www.digikey.com/htmldatasheets/production/2047793/0/0/1/ssd1306.html)
#define SSD1306_SET_MEM_MODE _u(0x20)
#define SSD1306_SET_COL_ADDR _u(0x21)
#define SSD1306_SET_PAGE_ADDR _u(0x22)
#define SSD1306_SET_HORIZ_SCROLL _u(0x26)
#define SSD1306_SET_SCROLL _u(0x2E)#define SSD1306_SET_DISP_START_LINE _u(0x40)#define SSD1306_SET_CONTRAST _u(0x81)
#define SSD1306_SET_CHARGE_PUMP _u(0x8D)#define SSD1306_SET_SEG_REMAP _u(0xA0)
#define SSD1306_SET_ENTIRE_ON _u(0xA4)
#define SSD1306_SET_ALL_ON _u(0xA5)
#define SSD1306_SET_NORM_DISP _u(0xA6)
#define SSD1306_SET_INV_DISP _u(0xA7)
#define SSD1306_SET_MUX_RATIO _u(0xA8)
#define SSD1306_SET_DISP _u(0xAE)
#define SSD1306_SET_COM_OUT_DIR _u(0xC0)
#define SSD1306_SET_COM_OUT_DIR_FLIP _u(0xC0)#define SSD1306_SET_DISP_OFFSET _u(0xD3)
#define SSD1306_SET_DISP_CLK_DIV _u(0xD5)
#define SSD1306_SET_PRECHARGE _u(0xD9)
#define SSD1306_SET_COM_PIN_CFG _u(0xDA)
#define SSD1306_SET_VCOM_DESEL _u(0xDB)//页高
#define SSD1306_PAGE_HEIGHT _u(8)
//页的数量
#define SSD1306_NUM_PAGES (SSD1306_HEIGHT / SSD1306_PAGE_HEIGHT)
//页面内容的缓冲区域,这部分内容在渲染之后会显示到屏幕上
#define SSD1306_BUF_LEN (SSD1306_NUM_PAGES * SSD1306_WIDTH)#define SSD1306_WRITE_MODE _u(0xFE)
#define SSD1306_READ_MODE _u(0xFF)
然后添加一个结构体,用来存放渲染区域的数据,包括起始列、起始页,这样我们既可以渲染整个屏幕,也可以只渲染一部分:
struct render_area {uint8_t start_col;uint8_t end_col;uint8_t start_page;uint8_t end_page;int buflen;
};
然后添加一个函数用来计算渲染区域的长度,将值赋予给上面结构体对象的buflen变量。因为我们可能需要清零渲染屏幕的缓冲,这个需要知道渲染区域的长度,不然会导致一些内容没有被清理或者覆盖掉,具体情况后面会提及:
void calc_render_area_buflen(struct render_area *area) {//计算渲染区域的长度area->buflen = (area->end_col - area->start_col + 1) * (area->end_page - area->start_page + 1);
}
接下来是 SSD1306 命令相关的代码,SSD1306 的支持一系列的命令来操作屏幕,命令具体情况请查看数据表:
void SSD1306_send_cmd(uint8_t cmd) {// I2C write process expects a control byte followed by data// this "data" can be a command or data to follow up a command// Co = 1, D/C = 0 => the driver expects a command(控制为1,数据或命令为0)//I2C写入进程需要一个控制字节和数据。数据可以也是一个命令或者跟着命令的数据。比如说uint8_t buf[2] = {0x80, cmd};//第一个参数表示用的哪个i2c控制器,i2c0或i2c1。这里默认为i2c0//第二个参数是要读取的设备的7位地址。这个前面定义宏的时候设置了,为0x3C//第三个参数是指向接收数据的缓冲的指针。你可能会疑问上面不是数组吗?C里面数组名其实就是指针)//第四个参数是接收数据的长度(单位为字节)。这里就为2//第五个参数如果是真,那么主机在交换数据之后保持对bus的控制。这里为falsei2c_write_blocking(i2c_default, SSD1306_I2C_ADDR, buf, 2, false);
}void SSD1306_send_cmd_list(uint8_t *buf, int num) {for (int i=0;i<num;i++)SSD1306_send_cmd(buf[i]);
}void SSD1306_send_buf(uint8_t buf[], int buflen) {//水平地址模式下,列地址指针自动增加并且包括下一个页,所以可以一个交换就可以发送包含整个帧的缓冲//复制帧缓冲到一个新的缓冲中是为了在开始添加一个控制字节uint8_t *temp_buf = malloc(buflen + 1);temp_buf[0] = 0x40;memcpy(temp_buf+1, buf, buflen);i2c_write_blocking(i2c_default, SSD1306_I2C_ADDR, temp_buf, buflen + 1, false);free(temp_buf);
}
然后编写 SSD1306 的初始化函数。需要注意cmds[]里的命令都是上面宏区域定义过的,有些后面会跟着需要设置的值,但是有些命令是自身决定设置值的。这只是个简单的数组,并不是什么特殊的数据结构:
void SSD1306_init() {/* 这里是重置进程为默认情况的完整流程,但是不同厂商的可能不一样 */uint8_t cmds[] = {SSD1306_SET_DISP, //关闭显示器/* 内存映射 */SSD1306_SET_MEM_MODE, //设置内存地址模式。0为横向地址模式,1为纵向地址模式,2为页地址模式0x00, //设置为横向寻址模式/* 分辨率和布局 */SSD1306_SET_DISP_START_LINE, //设置显示的开始行为0(后面没有设置参数就为0)SSD1306_SET_SEG_REMAP | 0x01, //重新映射分区,列地址127被映射到SEG0SSD1306_SET_MUX_RATIO, //设置多路传输速率SSD1306_HEIGHT - 1, //显示为高度减去1(因为这里是从0开始的)SSD1306_SET_COM_OUT_DIR | 0x08, //输出扫描方向。这里是从底部往上扫描,也就是COM[N-1]到COM0SSD1306_SET_DISP_OFFSET, //设置显示的偏移量0x00, //设置为无偏移SSD1306_SET_COM_PIN_CFG, //设置COM(common)针脚硬件配置。板子会指定一个特殊值/* 128x32分辨率会使用0x02,128x64分辨率可以使用0x12,如果不能正常工作,那么使用0x22或0x32 */
#if ((SSD1306_WIDTH == 128) && (SSD1306_HEIGHT == 32))0x02,
#elif ((SSD1306_WIDTH == 128) && (SSD1306_HEIGHT == 64))0x12,
#else0x02,
#endif/* 计时和驱动规划 */SSD1306_SET_DISP_CLK_DIV, //设置显示的时钟除法比(divide ratio,这个中文术语是啥?)0x80, //标准频率中1的除法比SSD1306_SET_PRECHARGE, //设置每次交换的周期0xF1, //板子上产生的VccSSD1306_SET_VCOM_DESEL, //设置VCOMH取消级别0x30, //0.83xVcc/* 显示 */SSD1306_SET_CONTRAST, //设置对比度0xFF, //设置为满的0xFFSSD1306_SET_ENTIRE_ON, //设置整个显示器来跟随RAM内容(也就是显示 RAM的内容)SSD1306_SET_NORM_DISP, //设置常规显示(不是颠倒的)SSD1306_SET_CHARGE_PUMP, //设置充电泵 set charge pump0x14, //板子上产生的VccSSD1306_SET_SCROLL | 0x00, //设置这个会停用水平滚动。这很重要,因为如果启用了滚动,那么当内存写入将出错SSD1306_SET_DISP | 0x01, //打开显示器};SSD1306_send_cmd_list(cmds, count_of(cmds));
}
渲染相关的代码
接下来编写渲染函数,这会将缓冲里的数据渲染到显示器上:
void render(uint8_t *buf, struct render_area *area) {//用*area更新显示器的某个区域uint8_t cmds[] = {SSD1306_SET_COL_ADDR,area->start_col,area->end_col,SSD1306_SET_PAGE_ADDR,area->start_page,area->end_page};SSD1306_send_cmd_list(cmds, count_of(cmds));SSD1306_send_buf(buf, area->buflen);
}
接下来是处理字符,需要将之前那个字符集找到需要的字符,然后经过转换和传递,最后将其显示到屏幕上:
/* 从字符集从获取字符ch的下标 */
static inline int GetFontIndex(uint8_t ch) {if (ch >= ' ' && ch <= 127) {return ch - ' ';}else return 0; //如果没找到返回空格的下标
}/* 输出一个字符ch到buf,起始位置为(x, y) */
static void WriteChar(uint8_t *buf, int16_t x, int16_t y, uint8_t ch) {//如果超出屏幕了if (x > SSD1306_WIDTH - 8 || y > SSD1306_HEIGHT - 8)return;//之前说过每一行其实是一页,一页的高度是8个像素,这里的y也是行的上界。y = y/8;//获取字符ch的下标int idx = GetFontIndex(ch);//这里是计算了实际初始位置,也就是第几行(y * 128)的第几个(x)int fb_idx = y * 128 + x;//输出字符ch的每一位for (int i=0;i<8;i++) {buf[fb_idx++] = font[idx * 8 + i];}
}/* 输出多个字符就是输出字符串了 */
static void WriteString(uint8_t *buf, int16_t x, int16_t y, char *str) {if (x > SSD1306_WIDTH - 8 || y > SSD1306_HEIGHT - 8)return;while (*str) {WriteChar(buf, x, y, *str++);x+=8;}
}
DHT11运行原理
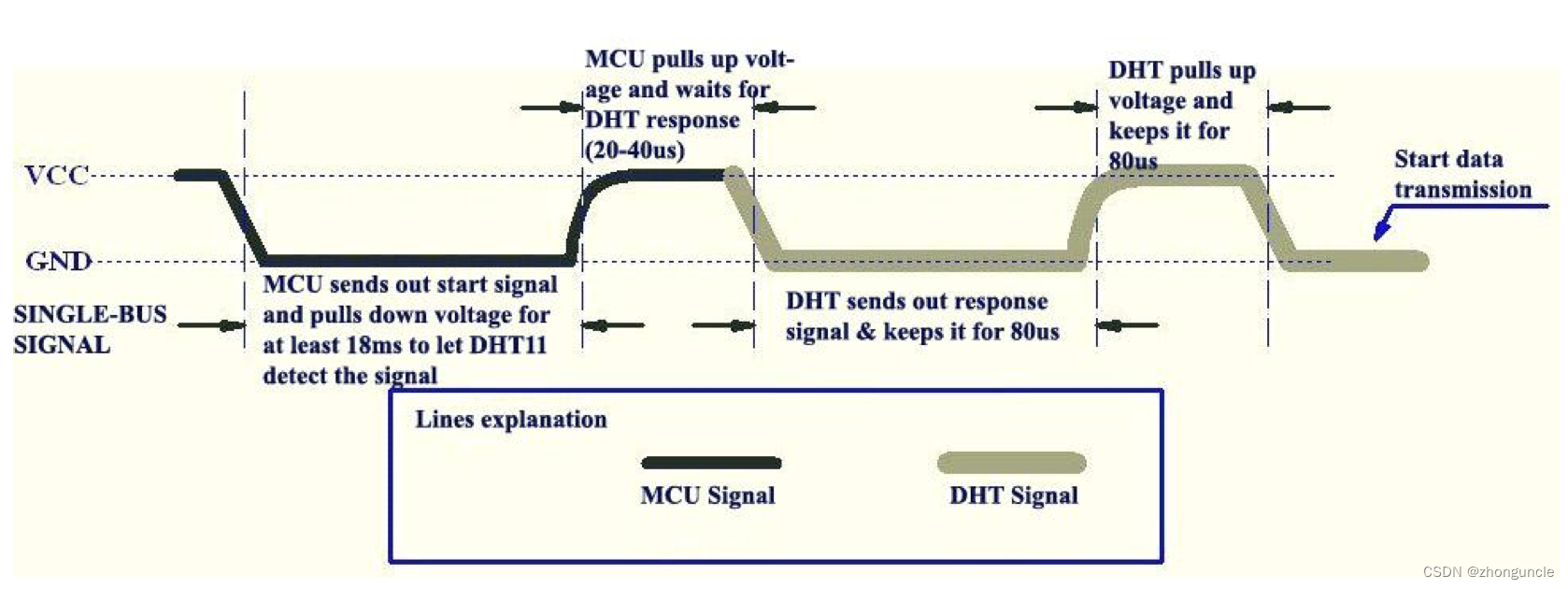
接下来编写代码从 DHT11 中读取数据。在这之前需要知道 DHT11 的工作机制,才知道如何编写代码。整体流程如下:
其中各部分如下:
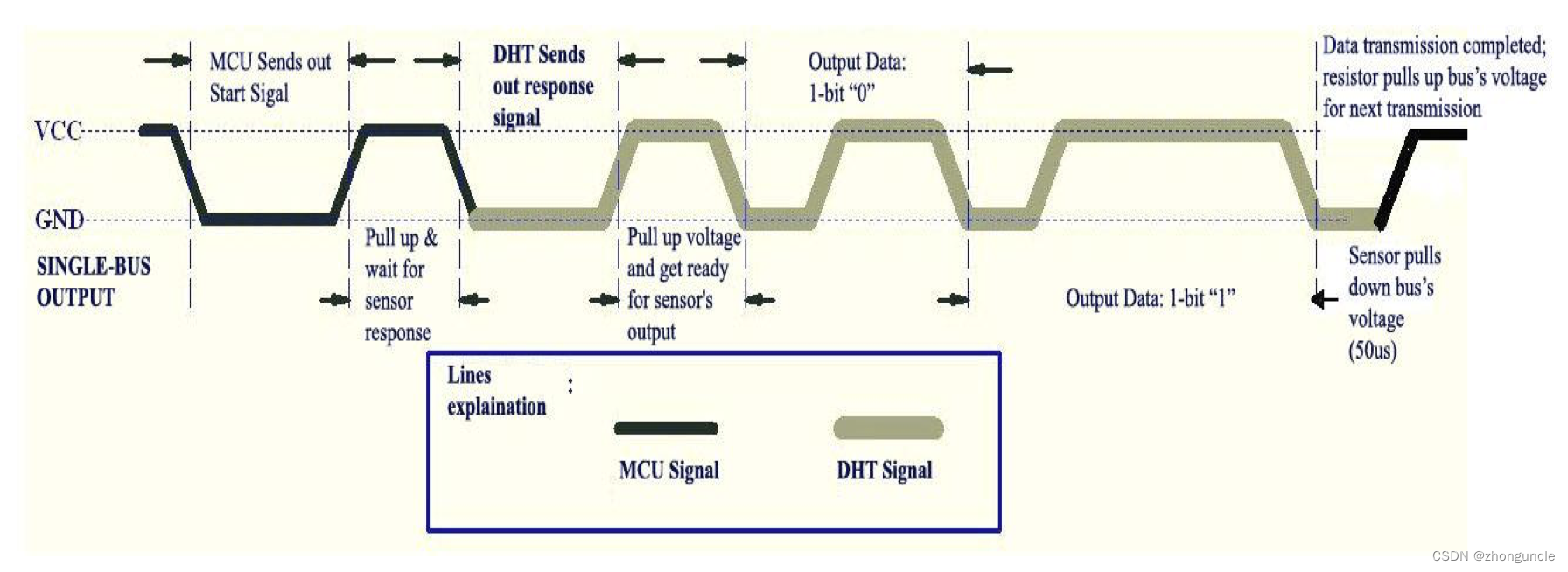
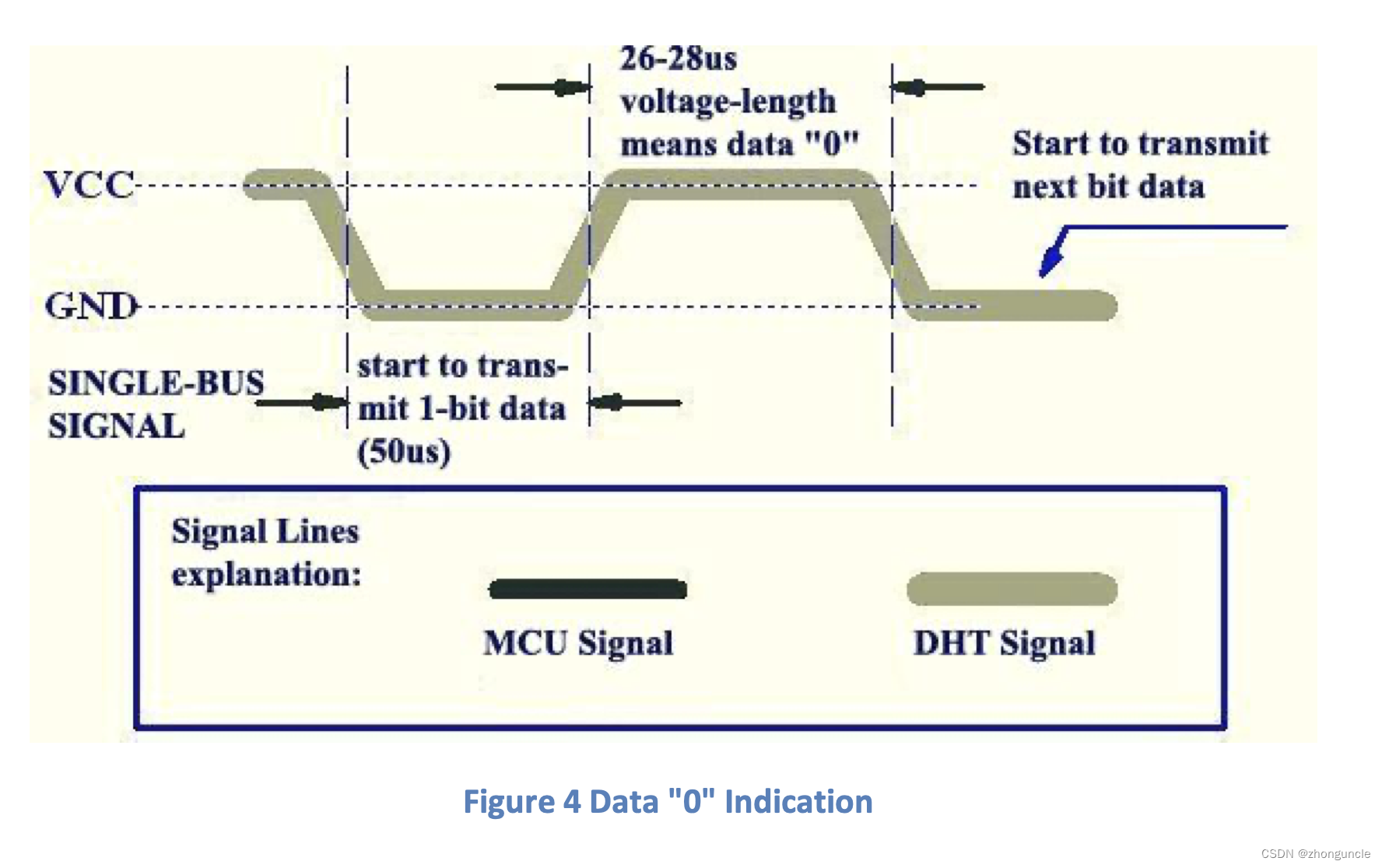
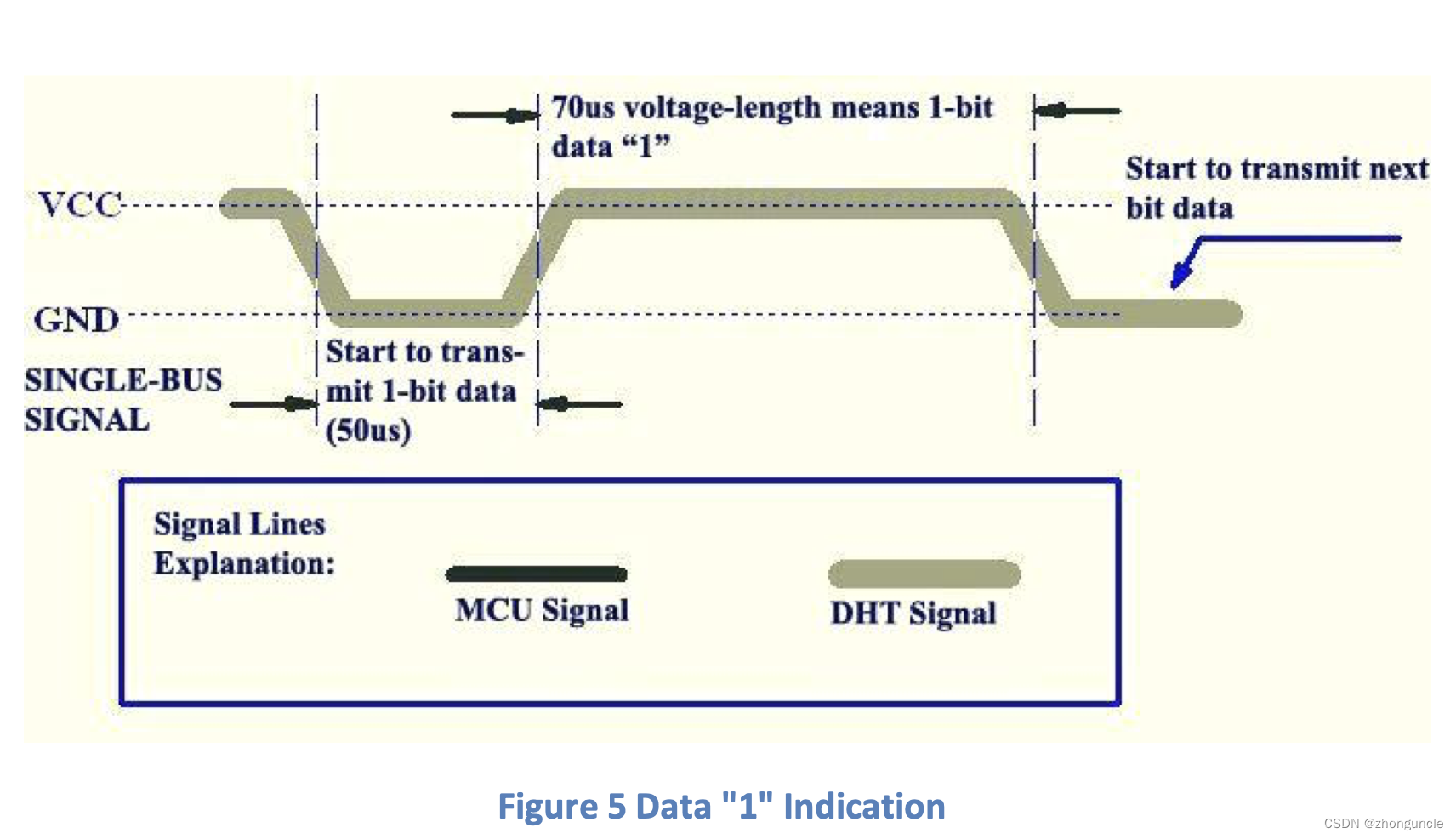
传递数据的时候根据以下信号来判断是0还是1:
这里的时长要需要注意:
- 最开始 Pico 发送万开始信号和拉低电压必须不少于 18ms,这样 DHT11 才能获取信号;
- 接下来 Pico 拉高电压等待 DHT11 回应需要 20~40us。这点一定要注意,因为
pico-examples中相关代码并没有等待回应的时间,这会导致无法获取数据,或者获取数据一段时间后失败; - DHT11 发送回应并且会保持 80us,然后再拉高电平再保持80us;
- 传递数据的时候,50us 低电平和 26~28us 高电平意味着数据一位
0,50us 低电平和 70us 高电平意味着数据一位1。 - 此外,DHT11在通电的前 1000ms 内无法获取数据,最快响应时间为6秒,最慢为 30s。每次通信大约需要 4ms。
DHT11 发送的 40 位数据先发高位的,内容为:8 位湿度整数数 + 8位湿度浮点数 + 8 位温度整数数 + 8位温度浮点数 + 8 位校验和。
DHT11相关代码和运行原理
首先设置连接的 GPIO 针脚是哪一个,以及设置最大时长:
const uint DHT_PIN = 16;
const uint MAX_TIMINGS = 85;
然后声明一个结构体用来存放 DHT11 获取的湿度和温度:
typedef struct {float humidity;float temperature;
} dht_reading;
接下来编写从 DHT11 读取数据的函数:
void read_from_dht(dht_reading *result) {//信号值有40bit,也就是5个字节int data[5] = {0, 0, 0, 0, 0};//纪录上一种信号的类型uint last = 1;//纪录当前信号是第几位数据uint j = 0;/* Pico发送信号阶段 */ //信号方向是DHT_PIN到GPIO_OUT,给DHT11发送一些信号。这里的dir是directiongpio_set_dir(DHT_PIN, GPIO_OUT);//给DHT_PIN输出低电平,并且维持18ms,这样让DHT11可以获取到这个信号gpio_put(DHT_PIN, 0);sleep_ms(18);//给DHT_PIN输出高电平,维持40us,用来等待 DHT11 的回应gpio_put(DHT_PIN,1);sleep_us(40);/* DHT发送信号阶段 */ //反转信号方向,从DHT_PIN到GPIO_IN,这样来获取DHT11的数据gpio_set_dir(DHT_PIN, GPIO_IN);//这里开始获取和处理DHT11的输出的信号for (uint i = 0; i < MAX_TIMINGS; i++) {//count用来计时的,单位为255uint count = 0;//如果获取的电平与上一个信号的电平相同,那么一直循环,这个用来消耗上文提到的等待时间//一开始DHT11有80us的低电平来作为回复,所以第一次循环的时候last为1(高电平)就直接跳过循环了,然后last也变成了0(低电平)。这样第二次循环的时候就会进入下面的循环耗时间。DHT11拉高电平之后就重复一遍这个操作//后续DHT11信号前面的50us也是这样处理的while (gpio_get(DHT_PIN) == last) {//开始迭代计数进行计时count++;sleep_us(1);//如果当前时常已经超过100us,那么这次整个外层迭代跳过,但是由于break只能跳过一层迭代,所以外层还要break一次//选择任意大于信号最大周期的值即可,不一定是100if (count == 100) break;}//将当前电平赋值给DHT_PINlast = gpio_get(DHT_PIN);//这个判断可不是多余的,这是用来彻底跳出外层迭代。不然会出现先显示湿度和温度的整数部分,再显示湿度和温度的浮点部分。一次获取无法获取完整的数据if (count == 100) break;//这里开始获取数据了//i>=4是因为前三个循环里分别是回应保持低电平、拉高电平和第一个数据位开始的50us//i % 2 == 0是因为奇数次都是数据位开始的50us,没有存放的数据if ((i >= 4) && (i % 2 == 0)) {//j/8刚好可以表示这是第几个字节//右移一位,这样8bit的数据只用设置最右的一位即可data[j / 8] <<= 1;//如果当前信号超过35,那么将最右一位设置为1//这个35是因为26~28表示0,大于这个范围的便表示1了,但是由于通信时间可能需要一段时间,所以留了一些冗余if (count > 35) data[j / 8] |= 1;j++;}}//获取到40位数据并且校验和(data[4] == ((data[0] + data[1] + data[2] + data[3]) & 0xFF))也是对的,那么将结果保存到result指针指向的结构体中if ((j >= 40) && (data[4] == ((data[0] + data[1] + data[2] + data[3]) & 0xFF))) {result->humidity = (float) ((data[0] << 8) + data[1]) / 10;if (result->humidity > 100) {result->humidity = data[0];}result->temperature = (float) (((data[2] & 0x7F) << 8) + data[3]) / 10;if (result->temperature > 125) {result->temperature = data[2];}if (data[2] & 0x80) {result->temperature = -result->temperature;}} else {//如果数据不对那么打印debug信息printf("Bad data\n");}
}
main函数
这里是整个程序的主体了,将使用上面声明的函数来实现需要的效果:
int main() {stdio_init_all();/* 初始化 GPIO */gpio_init(DHT_PIN);/* 初始化默认的i2c控制器以及针脚 */i2c_init(i2c_default, SSD1306_I2C_CLK);gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);/* 初始化SSD1306 */SSD1306_init();/* 初始化 frame_area 渲染区域(大小为SSD1306_WIDTH乘以SSD1306_NUM_PAGES) */struct render_area frame_area = {start_col: 0,end_col : SSD1306_WIDTH - 1,start_page : 0,end_page : SSD1306_NUM_PAGES - 1};/* 计算frame_area图像缓冲长度 */calc_render_area_buflen(&frame_area);/* 声明一个数组来存放缓冲,长度为上面的计算的 */uint8_t buf[SSD1306_BUF_LEN];/* 预先清空缓冲和屏幕 *///给这个数组每个元素分配为0(因为可能这个内存之前没有被清空,这样会显示花屏)memset(buf, 0, SSD1306_BUF_LEN);//然后渲染这个缓冲render(buf, &frame_area);//存放温度和湿度的字符串,方便后面渲染到屏幕上char temp[16];char hum[16];//第一次之前等待1000ms,不然可能第一次获取数据会失败sleep_ms(1000);/* 不断循环获取数据并且渲染到屏幕上 */while (true) {//声明一个dht_reading变量:reading,然后将从DHT11读取的数据存放到reading中dht_reading reading;read_from_dht(&reading);//给这个数组每个元素分配为0,不然上次显示的内容可能还在缓冲中,这样下次渲染显示会出问题memset(buf, 0, SSD1306_BUF_LEN);//生成字符串用来打印,分别存放到temp和hum字符数组中,然后再将其写入到缓冲数组buf中sprintf(temp, "temp = %.02f C", reading.temperature);//这个printf是给串口USB输出,后面演示可以看到printf("temp = %.02f C\n", reading.temperature);WriteString(buf, 0, 0, temp);sprintf(hum, "hum = %.02f %%", reading.humidity);printf("hum = %.02f %%\n", reading.humidity);//由于行高为8,所以第二行写入的y值要加8,当然你如果想让行距好看一些,可以设置为10,比如说这里WriteString(buf, 0, 8, hum);//渲染缓冲render(buf, &frame_area);//等待6000ms,因为DHT11的最小响应时间为6秒sleep_ms(6000);}
}
CMakeLists.txt
然后在CMakeLists.txt文件中放入以下内容:
cmake_minimum_required(VERSION 3.12)include(pico_sdk_import.cmake)project(pico-temp-hum)pico_sdk_init()if (TARGET tinyusb_device)add_executable(pico-temp-humpico-temp-hum.c)# 添加依赖项target_link_libraries(pico-temp-hum pico_stdlib hardware_adc hardware_i2c)# 激活USB输出,关闭UART输出(也可以全开)pico_enable_stdio_usb(pico-temp-hum 1)pico_enable_stdio_uart(pico-temp-hum 0)# 创建映射/bin/hex/uf2等文件pico_add_extra_outputs(pico-temp-hum)elseif(PICO_ON_DEVICE)message(WARNING "not building hello_usb because TinyUSB submodule is not initialized in the SDK")
endif()
构建项目以及烧录
首先进入build目录:
$ cd build
然后使用以下命令进行构建:
$ cmake .. && make -j6
...
[ 98%] Building C object CMakeFiles/pico-temp-hum.dir/Users/zhongyijiang/Desktop/pico/pico-sdk/src/rp2_common/hardware_i2c/i2c.c.obj
[100%] Linking CXX executable pico-temp-hum.elf
[100%] Built target pico-temp-hum
接下来将其烧录到 Pico 上。先按住 Pico 上的“BOOTSEL”按钮,再插入线缆连接到电脑,这时候 Pico 会进入 USB 存储模式。
然后将构建出来的pico-temp-hum.uf2拖入其中即可。如果是只能使用终端那么可以使用以下命令:
$ cp pico-temp-hum.uf2 /Volumes/RPI-RP2/pico-temp-hum.uf2
这是 macOS 的版本,如果你使用的是 Ubuntu 或者 WSL,那么将/Volumes/改成/dev/即可(RPI-RP2可能也需要小写)。
这时候会显示异常弹出,这是正常的不用担心。
最终成果
这时候你就能看到这样的效果啦:
如果你使用串行交流程序查看的话,比如minicom,使用的命令如下:
$ minicom -D /dev/cu.usbmodem1431301 -b 115200
这里的cu.usbmodem1431301不是一定的,每次连接的值都有可能不同,需要根据实际情况进行修改。
在串行交流程序中会看到下面的情况:
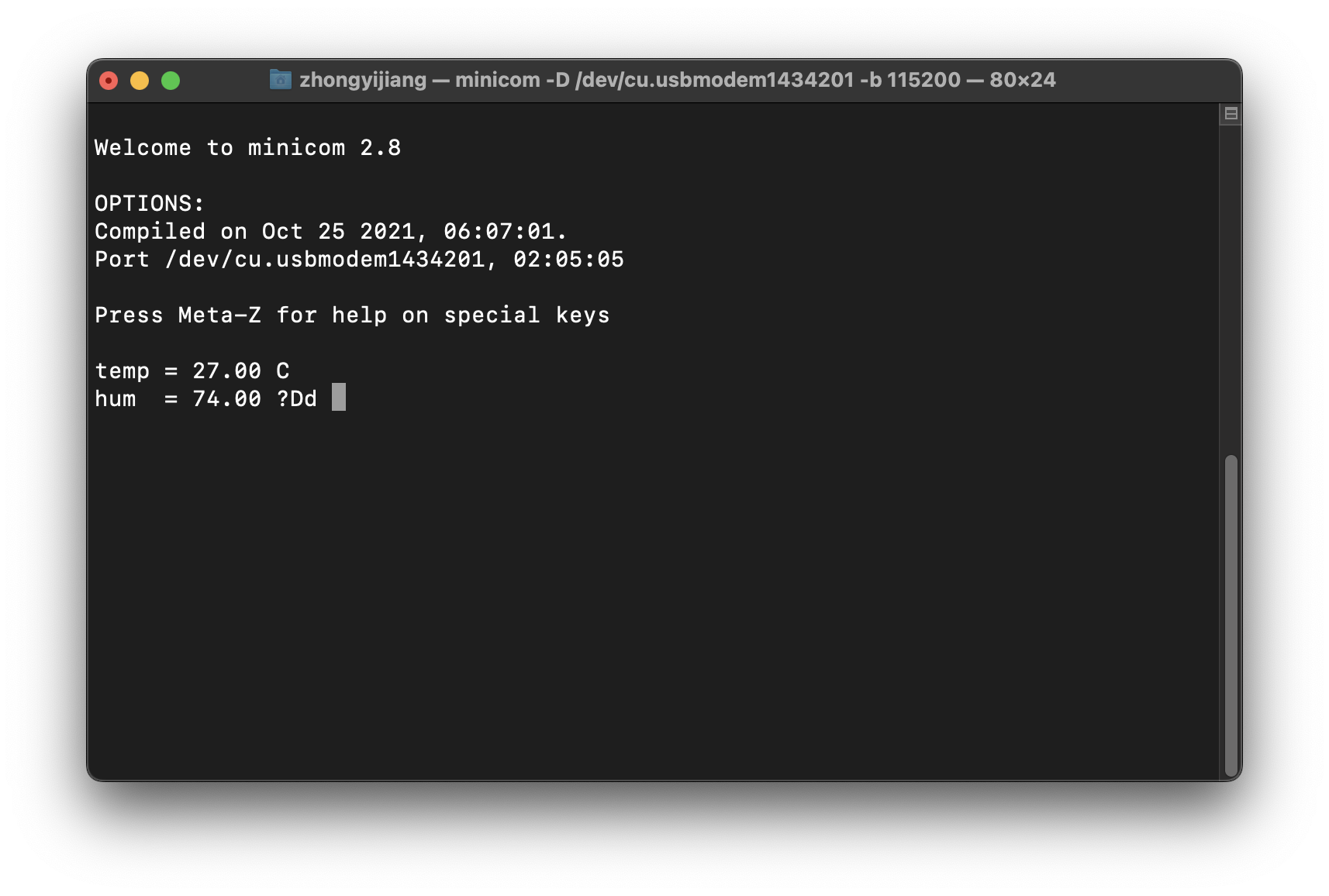
可以看到除了%因为传递问题没显示好,其他都一切正常,和 OLED 上显示的一样。
我将完整的项目放到了GitHub-ZhongUncle/pico-temp-hum-oled,并且在build目录下放了编译好的内容,方便读者进行尝试。
扩展阅读
这里有一些扩展资料,是我在研究过程中发现或者参考的,还有一些我在这个过程中写的博客,感兴趣可以看看。
《SSD1306 Advance Information》 这个相当于 SSD1306 的参数表,里面介绍了很多信息,包括文中提到的命令等信息。
《DHT11 Humidity & Temperature Sensor》 这是一份 DHT11 的文档,介绍了一些相关信息和运行机制,上文中的截图就来自于此。需要注意不同厂商的 DHT11 文档不一样,这份虽然不长,但是内容详尽得多。
https://learn.sparkfun.com/tutorials/i2c/all 这是一篇介绍 I2C 的文章,如果不了解 I2C 可以看看。
https://forums.raspberrypi.com/viewtopic.php?t=338243 这篇帖子有人询问如何修改默认 I2C 针脚,然后树莓派官方工程师回答了方法:
但是其中定义在源代码中的方法不太对,正如他所说的不确定。所以我通过实践总结了这些方法,并且写了一篇博客:《用C/C++修改I2C默认的SDA和SCL针脚》
然后我经过自己刨根问底式的探究了如何制定某个针脚,而不是使用默认值或者修改默认值:《Pico如何使用C/C++选择使用哪个I2C控制器,以及SDA和SCL针脚》
此外,对于_u这个宏是什么意思我是通过这篇帖子知道的:#define _u macro?
希望能帮到有需要的人~