franka_visualization包
该软件包包含连接到机器人并发布机器人和夹爪关节状态以在 RViz 中进行可视化的发布者。要运行此包启动:
roslaunch franka_visualization franka_visualization.launch robot_ip:=<fci-ip> \load_gripper:=<true|false>比如:
roslaunch franka_visualization franka_visualization.launch robot_ip:=franka \load_gripper:=true可以选择是否加载夹爪
franka_gripper包
roslaunch franka_gripper franka_gripper.launch robot_ip:=franka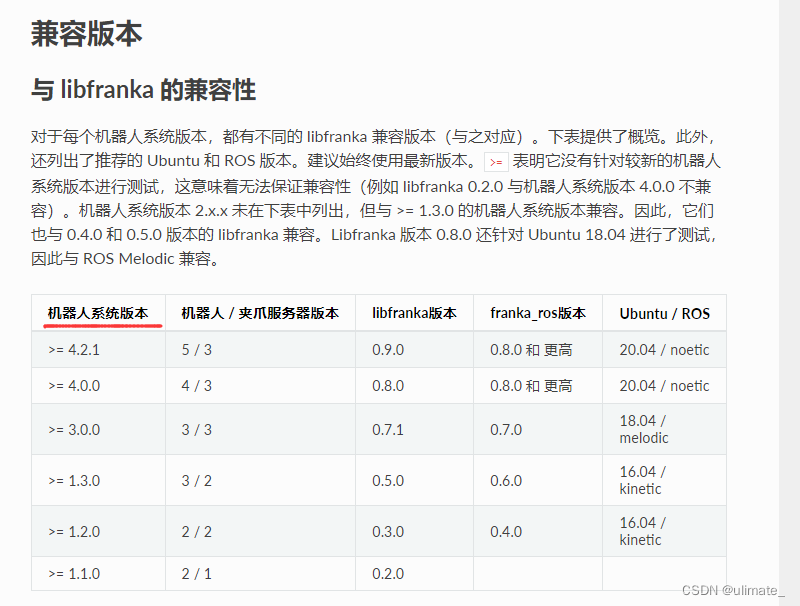
这个机器人系统版本是Franka机械臂自身固件的版本,即Franka Control Interface (FCI) 的版本。Franka机械臂内部包含控制单元和运动控制单元,其固件版本就是机器人系统版本。而libfranka是Franka官方提供的与机械臂通信的C++库,它需要与机械臂系统版本兼容才能正常工作
这里注意了,0.8.0以上版本的franka_ros才有franka_gazebo这个包,libfranka的版本和franka_ros的版本不需要完全匹配,有一定的兼容范围