ChatGPT to Code with MATLAB
欢迎使用Markdown编辑器
卡尔曼滤波
the context is:
在此代码中:
F 定义了状态转移矩阵。
H 定义了测量矩阵。
Q 定义了过程噪声协方差矩阵。
R 定义了测量噪声协方差矩阵。
x_hat 和 P 分别是初始状态和协方差估计值。
num_timesteps 是时间步数。
state_estimates
% Define the state transition matrix
F = [1 0 dt 0; 0 1 0 dt; 0 0 1 0; 0 0 0 1];% Define the measurement matrix
H = [1 0 0 0; 0 1 0 0];% Define the process noise covariance matrix
Q = [dt^4/4 0 dt^3/2 0; 0 dt^4/4 0 dt^3/2; dt^3/2 0 dt^2 0; 0 dt^3/2 0 dt^2];% Define the measurement noise covariance matrix
R = [measurement_noise_x^2 0; 0 measurement_noise_y^2];% Initialize state and covariance estimates
x_hat = [initial_x; initial_y; initial_velocity_x; initial_velocity_y];
P = [initial_covariance_x 0 0 0; 0 initial_covariance_y 0 0; 0 0 initial_covariance_velocity_x 0; 0 0 0 initial_covariance_velocity_y];% Loop through each time step
for t = 1:num_timesteps% Predict state and covariancex_hat_minus = F * x_hat;P_minus = F * P * F' + Q;% Compute Kalman gainK = P_minus * H' / (H * P_minus * H' + R);% Update state and covariance estimatesx_hat = x_hat_minus + K * (measurements(t,:)' - H * x_hat_minus);P = (eye(4) - K * H) * P_minus;% Store estimate for this time stepstate_estimates(t,:) = x_hat';covariance_estimates(t,:) = diag(P)';end问题重述:
分别用matlabR2018b和C++写卡尔曼滤波处理惯性导航数据的代码,并带有详细地讲解和注释
请使用matlabR2018b写卡尔曼滤波处理惯性导航数据的基本代码,并带注释
讲一下惯性导航原理
惯性导航系统是一种利用惯性传感器(如加速度计)来确定自身位置和运动状态的导航系统。它通过测量物体在运动过程中的加速度来估算物体的位置和速度。
惯性导航系统主要应用于飞行器、船舶、汽车等运动物体,并且在GPS信号不良或者完全不可用的情况下仍能提供定位信息。
惯性导航系统的原理是通过测量物体的加速度,并结合物理学中的惯性原理,利用数学模型来预测物体的位置和速度。为了提高精度,惯性导航系统通常需要配合其他定位技术,如GPS、北斗导航等。
讲一下IMU的原理,测量数据如何进行惯性导航解算?
IMU(Inertial Measurement Unit)是惯性导航系统的核心部件,它包含加速度计、陀螺仪和可能还有磁力计等传感器。
加速度计测量物体的线性加速度,陀螺仪测量物体的角速度,磁力计测量物体周围的磁场强度。
IMU的数据被用于计算物体的运动状态,如位置、速度和姿态。通常惯性导航系统使用一种叫做积分的数学方法,对加速度计和陀螺仪的数据进行处理,以确定物体的位置和速度。
同时,IMU数据也可以与其他定位技术,如GPS,结合在一起,以提高定位精度。通过使用多传感器融合技术,惯性导航系统可以消除各个传感器的误差,并提供更精确的定位信息。
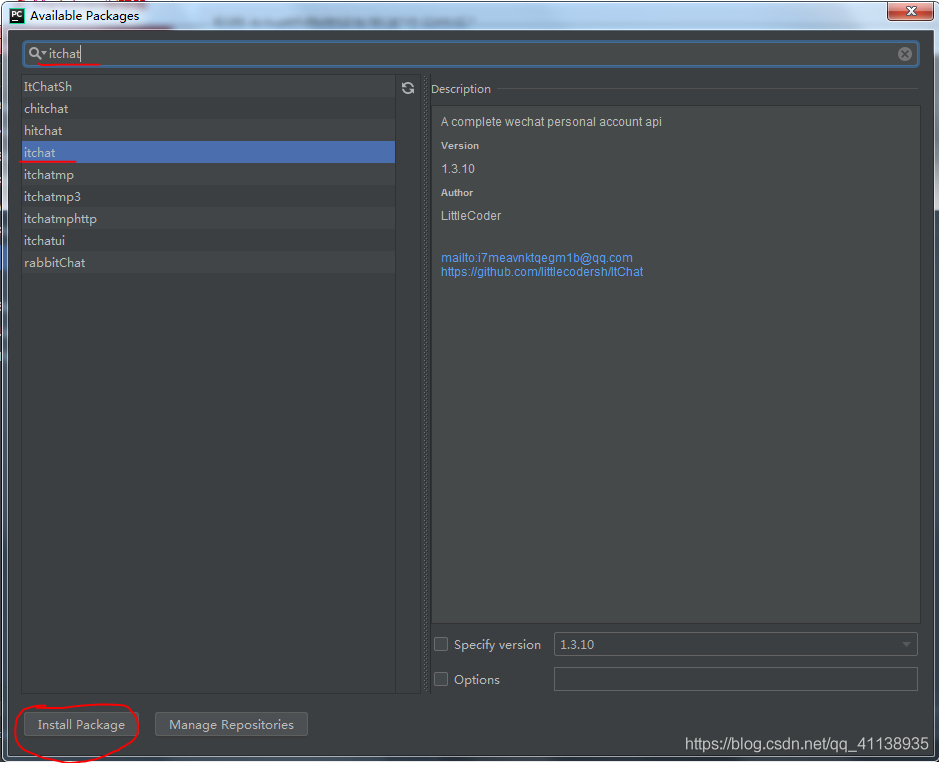
下载anaconda并安装的流程?
步骤如下:访问Anaconda官方网站(https://www.anaconda.com/products/distribution)并下载最新版本的Anaconda。打开下载的安装包,开始安装程序。按照安装向导的说明操作,确保选择安装所有组件。安装程序会提示您添加Anaconda到环境变量中,建议选择“是”。安装程序完成后,请打开命令提示符或PowerShell窗口,键入conda命令以验证Anaconda是否已成功安装。请注意,Anaconda安装程序会根据您的系统配置自动选择64位或32位版本。如果您系统不支持64位,安装程序会自动安装32位版本。安装后,您可以通过Anaconda Navigator、Anaconda Prompt或Jupyter笔记本来使用Anaconda。
jupyter怎么用
里插入图片描述
水池试验
介绍下用于UUV、AUV等小型无人潜航器中导航设备(声学USBL、LBL和声呐)的水池试验,国内外的高校和实验室都有哪些水池试验条件?
UUV、AUV 等小型无人潜航器中常用的导航设备(声学 USBL、LBL 和声呐)需要在模拟实际水下环境的条件下进行测试和验证。为此,国内外的高校和实验室都设有水池试验设施,用于评估声学导航设备的性能。
常见的水池试验条件包括:
水池的尺寸和深度
水温、温度梯度和温度分布
水中的噪声水平
水池内部的障碍物(如管道、墙壁等)
声学导航设备的布置和发射角度
这些条件可以通过计算机模拟、实验数据以及实际试验等方法来调整和优化。通过在水池试验中的测试,可以确定声学导航设备的精确性和可靠性,并为下一步的实际水下测试提供依据。
matlab编写GUI
使用MATLAB R2018b 编写一个GUI界面,功能带有两个按钮,按钮名称叫“选择”和“处理”,点击“选择”按钮能从本地选择多张照片,点击“处理”按钮,能提取照片的分辨率,并传到GUI界面上的文本框中
您可以使用MATLAB的GUI工具箱,如下代码编写一个GUI界面:
% 使用GUIDE创建一个界面
f = figure('Visible','off','Position',[360,500,450,285]);% 创建按钮
hselect = uicontrol('Style','pushbutton',...'String','选择','Position',[315,220,70,25],...'Callback',@select_callback);
hprocess = uicontrol('Style','pushbutton',...'String','处理','Position',[315,180,70,25],...'Callback',@process_callback);% 创建文本框
hedit = uicontrol('Style','edit',...'Position',[120,220,150,25],'String','');% 设置界面可见性
f.Visible = 'on';% 选择按钮的回调函数
function select_callback(hObject,eventdata)[fileName,pathName] = uigetfile({'*.jpg;*.png'},'选择图像');fullFileName = strcat(pathName,fileName);% 将图像的路径保存在文本框中hObject.Parent.Children(1).String = fullFileName;
end% 处理按钮的回调函数
function process_callback(hObject,eventdata)% 从文本框中获取图像的路径img_path = hObject.Parent.Children(1).String;% 读取图像并获取其分辨率img = imread(img_path);[height,width,~] = size(img);% 将分辨率信息保存在文本框中hObject.Parent.Children(1).String = sprintf('图像分辨率:%d x %d',width,height);
end
在上面的代码中,使用GUIDE创建一个界面,添加两个按钮和一个文本框。然后,为每个按钮分配一个回调函数,在回调函数中执行所需的
分割线
来源:
https://openai.com/blog/chatgpt/