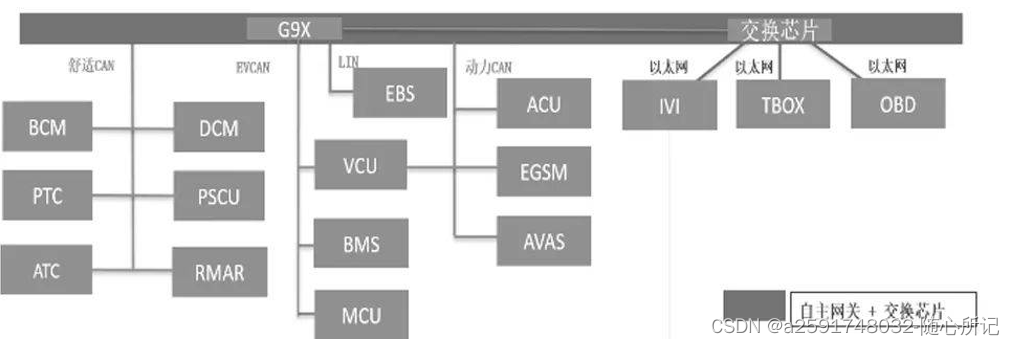
常用ecu框架组成:
BCM(body control module)-车身控制模块:
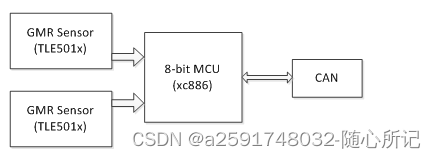
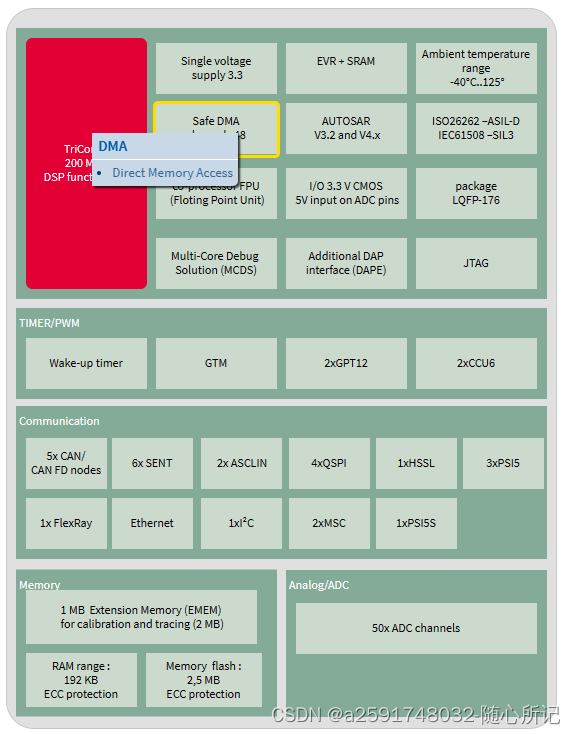
如英飞凌tc265芯片:
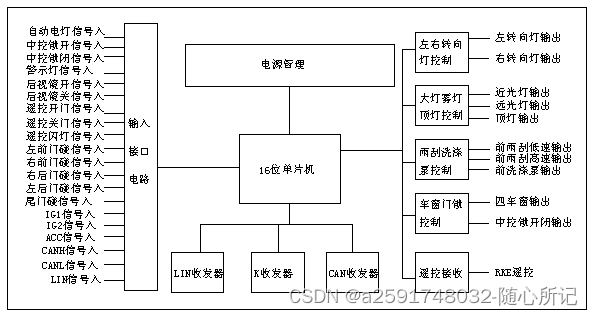
车身控制单元(BCM)适合应用于12V和24V两种电压工作环境,可用于轿车、大客车和商用车的车身控制。输入模块通过采集电路采集各路开关量和模拟量信息输入,LIN接收模块接收控制手柄单元信号(灯光、雨刮、洗涤等信号),输出模块采用功率驱动和继电器驱动实现,有很好的性价比,CAN通信模块实现与其它汽车电子模块信息交换。主要实现车身门控制包括门锁、各种灯光、前后洗涤、前后雨刮、电动车窗等控制。在软件上实现了NM(CAN)网络管理、UDS诊断、CCP标定等功能并通过DV实验。
EPS(Electric Power Steering)-电动助力转向系统:
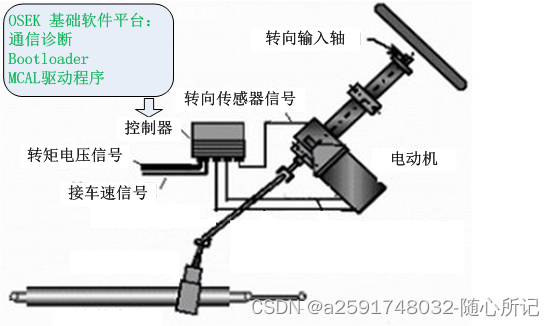
PS是提供辅助转向动力的系统。驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转距电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。
该电控单元适合应用于12V供电环境,可用于轿车和纯电动汽车的转向控制。主控MCU采用英飞凌的XC2300系列单片机,通过采集发动机转速信号、车速信号、扭矩传感器信号、点火信号等车辆状态信息,并送入到控制器ECU进行综合、分析、判断和运算后输出电流信号控制EPS电机。EPS电机通过传动机构产生助力转矩,该助力扭矩施加到转向轴上,从而辅助驾驶员完成转向操作。该系统低速时转向控制轻便,高速时转向助力小,操纵平稳不发飘。结构组成如下图所示:

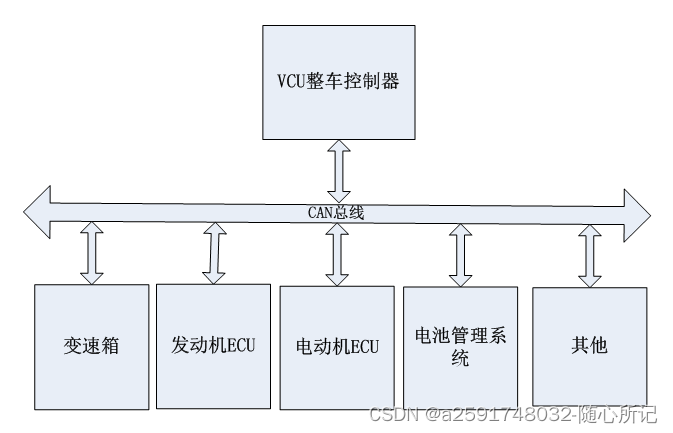
VCU(Vehecle Control Unit)-整车控制器:
VCU通过采集驾驶员操控信息,车辆行使信息、发动机、电机、电池、变速箱数据及各个子系统的反馈信息,经过计算向各个子系统发送控制命令,从而实现VCU对整车的控制。整车控制器的策略是在不同工况下结合电机、电池和发动机驱动汽车,使得效率最佳。处理器采用英飞凌公司32位处理器TC1728N。其制定和传输指令。
比如当驾驶员启动车辆上高压时,VCU就会告诉电池的BMS:“BMS老弟,别睡了,到你上场了。”至于BMS怎么工作来控制电池系统的,VCU可不管。
再比如,当电池系统内部的温度过高时,BMS没办法只能向VCU汇报,VCU就会告诉电池的冷却空调:“电池又嫌热了,去看看怎么回事。”电池空调便会启动来给电池降降温,至于空调内的制冷剂要开多大的流量,VCU可不管。
而如果电池持续高温,电池的空调已经不能解决问题了,VCU只能告诉仪表盘:“把电池高温的故障灯给我亮起来,让驾驶员找人来看看怎么回事啊,烦死了。”至于怎么修好的,VCU可不管。
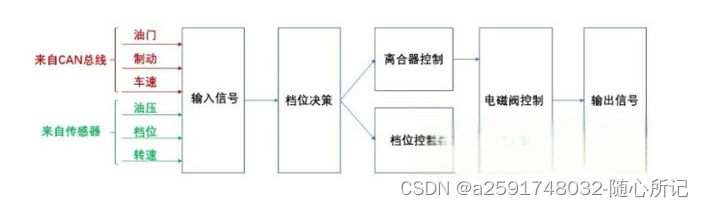
TCU(Transmission-Control-Unit)-自动变速箱控制单元
通过程序来自动控制档位的切换以及对离合器的控制,只要脚踩油门,车就可以加速,踩制动车就可以实现减速


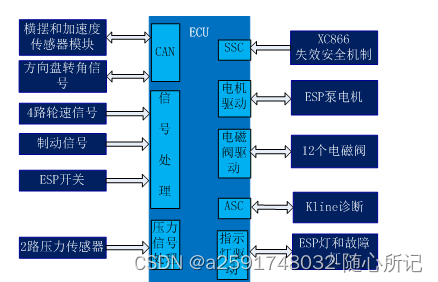
ESP(Electronic Stability Program)-车身电子稳定系统
ESP系统通过采集车轮速度信号、制动主缸压力信号、制动开关信号、方向盘转角信号以及横摆和加速度信号等等,判断出驾驶员的意图和车辆的行驶状态,并通过电磁阀和泵电机的控制、发动机和变速箱控制调整等措施,使其在合适的车轮上施加制动力而对车辆产生纠正力矩,以纠正车辆产生的过度转向或转向不足的现象,主动干预确保车辆操纵的稳定性。
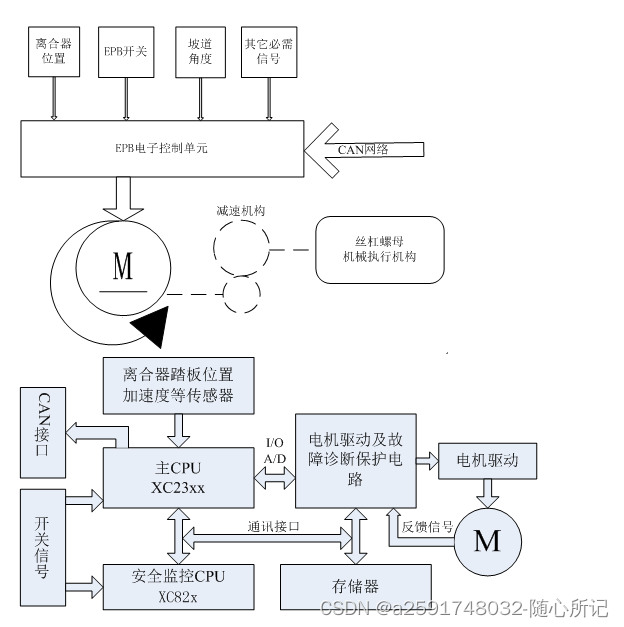
EPB(Electrical Park Brake)-电子驻车制动系统
电子驻车制动系统是由电子控制方式实现停车制动的技术,它将行车过程中的临时性制动和停车后的长时性制动功能整合在一起,控制方式从之前的机械式手刹拉杆变成了电子机械控制。
SAS(steering wheel sensor)-方向盘转角传感器
作为汽车ESP/ESC (车辆稳定性控制系统)的一个组成部分,主要安装在方向盘下方的方向柱内。它一般通过CAN总线和PCM相连。一般可以分为模拟式方向盘转角传感器和数字式方向盘转角传感器。