前言
链表作为一个像是用“链子”链接起来的容器,在数据的存储等方面极为便捷。虽然单链表单独在实际的应用中没用什么作用,但是当他可以结合其他结构,比如哈希桶之类的。不过今天学习的list其实是一个带头双向链表。
言归正传,让我们看一下list的特性。
一、list的特性
这里我还是推荐去cplusplus上阅读英文原文档。这里我总结了几条,
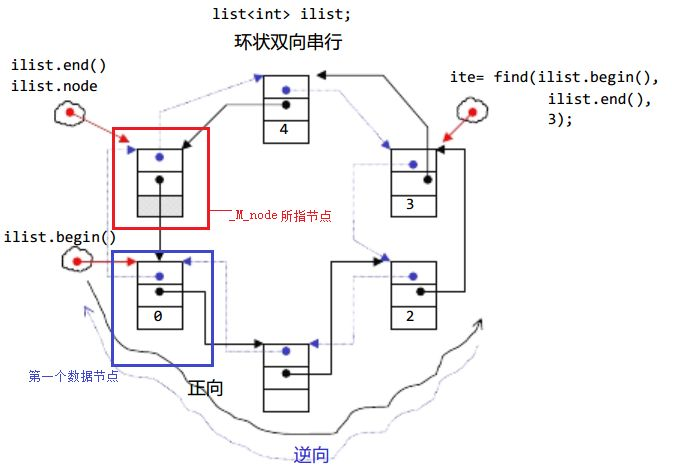
1. list 是可以在常数范围内 在任意位置进行插入和删除的序列式容器 ,并且该容器 可以前后双向迭代。2. list 的底层是 双向链表结构 ,双向链表中每个 元素存储在互不相关的独立节点 中,在节点中通过指针指向其前一个元素和后一个元素。3. list 与 forward_list 非常相似:最主要的不同在于 forward_list是单链表 ,只能朝前迭代,已让其更简单高效。4. 与其他的序列式容器相比 (array , vector , deque) , list 通常 在任意位置进行插入、移除元素的执行效率更好。5. 与其他序列式容器相比, list 和 forward_list 最大的缺陷是 不支持任意位置的随机访问 ,比如:要访问 list的第6 个元素,必须从已知的位置 ( 比如头部或者尾部 ) 迭代到该位置,在这段位置上迭代需要线性的时间开销;list 还需要一些 额外的空间, 以保存每个节点的相关联信息 ( 对于存储类型较小元素的大 list 来说这可能是一个重要的因素)。
其物理模型简化后如下图:
二、list的基本结构
前面我们提到list的底层是双向链表结构,双向链表中每个元素存储在互不相关的独立节点中,在节点中通过指针指向其前一个元素和后一个元素。那么他每个小结点的结构就变得清楚明了了。
template<class T>struct list_node{list_node<T>* _prev;list_node<T>* _next;T _val;list_node(const T& val = T()): _prev(nullptr), _next(nullptr), _val(val){} };随后我们就可以写list的本体了
template<class T>class list{typedef list_node<T> Node;private:Node* _head;//哨兵位size_t _size;};加一个表示size的数据是因为list的空间是不连续的。
三、list的基础构造
void empty_init(){_head = new Node;_head->_prev = _head;_head->_next = _head;_size = 0;}list(){empty_init();}将empty经行再封装是因为这样的构造函数设计可以方便地创建空的list对象,并且避免了在创建list对象时必须显式地指定初始大小。同时,通过将初始化代码封装在empty_init()函数中,可以简化list类的实现,提高代码的可读性和可维护性。
四、list的插入与删除
与vector不同的是list的其他几种构造或多或少的依赖插入,而且哨兵位的初始化就可以继续后面的操作。当然插入和删除是list的重要点。
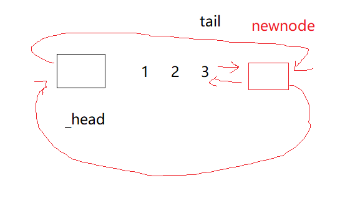
我们先从尾插写起,如图当插入一个节点时我们可以先新建一个新的节点,将值存入其中。然后将末尾(_head->_prev)的_next与newnode链接,然后将new的_prev与末尾链接,最后将头节点的_prev指向newnode,newnode的_next与_head链接。
void push_back(const T&x){Node* newnode = new Node(x);Node* tail = _head->_prev;tail->_next = newnode;newnode->_prev = tail;newnode->_next = _head;_head->_prev = newnode;_size++;}而对于任意位置插入,其实和上面的逻辑相似。
//在pos之前插入,返回新插入元素位置iterator insert(iterator pos, const T& x){Node* cur = pos._node;Node* prev = cur->_prev;Node* newnode = new Node(x);prev->_next = newnode;newnode->_next = cur;cur->_prev = newnode;newnode->_prev = prev;++_size;return newnode;}与次对立的是list任意位置的删除。逻辑就是他反过来。
iterator erase(iterator pos){assert(pos != end());Node* cur = pos._node;Node* prev = cur->_prev;Node* next = cur->_next;prev->_next = next;next->_prev = prev;delete cur;--_size;return next;}但是list的删除面临着迭代器的失效前面说过,此处大家可将迭代器暂时理解成类似于指针,迭代器失效即迭代器所指向的节点的无效,即该节 点被删除了。因为list的底层结构为带头结点的双向循环链表,因此在list中进行插入时是不会导致list的迭代器失效的,只有在删除时才会失效,并且失效的只是指向被删除节点的迭代器,其他迭代器不会受到影响。
比如下面的案例:
void TestListIterator1()
{int array[] = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 0 };list<int> l(array, array+sizeof(array)/sizeof(array[0]));auto it = l.begin();while (it != l.end()){l.erase(it); ++it;}// erase()函数执行后,it所指向的节点已被删除,因此it无效,在下一次使用it时,必须先给
其赋值改正后:
void TestListIterator()
{int array[] = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 0 };list<int> l(array, array+sizeof(array)/sizeof(array[0]));auto it = l.begin();while (it != l.end()){l.erase(it++); // it = l.erase(it);}
}当这两个比较泛型的插入与删除实现后其余代码就变得简单了。
//拷贝构造 list(const list<T>& lt)//list(const list& lt){empty_init();for (auto& e : lt){push_back(e);}}
//析构函数~list(){clear();delete _head;_head = nullptr;}
//头插void push_front(const T& x){insert(begin(), x);}
//尾删void pop_back(){erase(--end());}
//头删void pop_front(){erase(begin());}
//清空void clear(){iterator it = begin();while (it != end()){it = erase(it);}_size = 0;}五、list的迭代器
list的迭代器我们要实现的主要就是他的++与--问题,而++就是返回当前位置的_next, --就是返回当前位置的_prev。
template<class T,class Ref,class Ptr>struct _list_iterator{typedef list_node<T> Node;typedef _list_iterator<T, Ref,Ptr> self;Node* _node;_list_iterator(Node* node):_node(node){}Ref& operator*(){return _node->_val;}Ptr operator->(){return &_node->_val;}self& operator++() {_node = _node->_next;return *this;}self& operator++(int)//后置{self tmp(*this);_node = _node->_next;return tmp;}self& operator--(){_node = _node->_prev;return *this;}self operator--(int){self tmp(*this);_node = _node->_prev;return tmp;}bool operator!=(const self & it)const{return _node != it._node;}bool operator==(const self & it)const{return _node == it._node;}};_list_iterator类模板的三个类型参数分别为T(元素类型)、Ref(引用类型)和Ptr(指针类型)。这个类包含一个成员变量_node,它是一个指向list_node对象的指针,用于存储当前迭代器所指向的节点。这里的Ref与Ptr主要用于分辨const与非const.
六、list与vector的对比
| vector | list | |
| 底 层 结 构 | 动态顺序表,一段连续空间 | 带头结点的双向循环链表 |
| 随 机 访 问 | 支持随机访问,访问某个元素效率 O(1) | 不支持随机访问,访问某个元素 效率 O(N) |
| 插 入 和 删 除 | 任意位置插入和删除效率低,需要搬移元素,时间复杂 度为 O(N) ,插入时有可能需要增容,增容:开辟新空 间,拷贝元素,释放旧空间,导致效率更低 | 任意位置插入和删除效率高,不 需要搬移元素,时间复杂度为 O(1) |
| 空 间 利 用 率 | 底层为连续空间,不容易造成内存碎片,空间利用率 高,缓存利用率高 | 底层节点动态开辟,小节点容易 造成内存碎片,空间利用率低, 缓存利用率低 |
| 迭 代 器 | 原生态指针 | 对原生态指针 ( 节点指针 ) 进行封装 |
| 迭 代 器 失 效 | 在插入元素时,要给所有的迭代器重新赋值,因为插入 元素有可能会导致重新扩容,致使原来迭代器失效,删 除时,当前迭代器需要重新赋值否则会失效 | 插入元素不会导致迭代器失效, 删除元素时,只会导致当前迭代 器失效,其他迭代器不受影响 |
| 使 用 场 景 | 需要高效存储,支持随机访问,不关心插入删除效率 | 大量插入和删除操作,不关心随 机访问 |