是时候可以手动推导一下linux里面基类父类和子类的关系了
代码放最后把
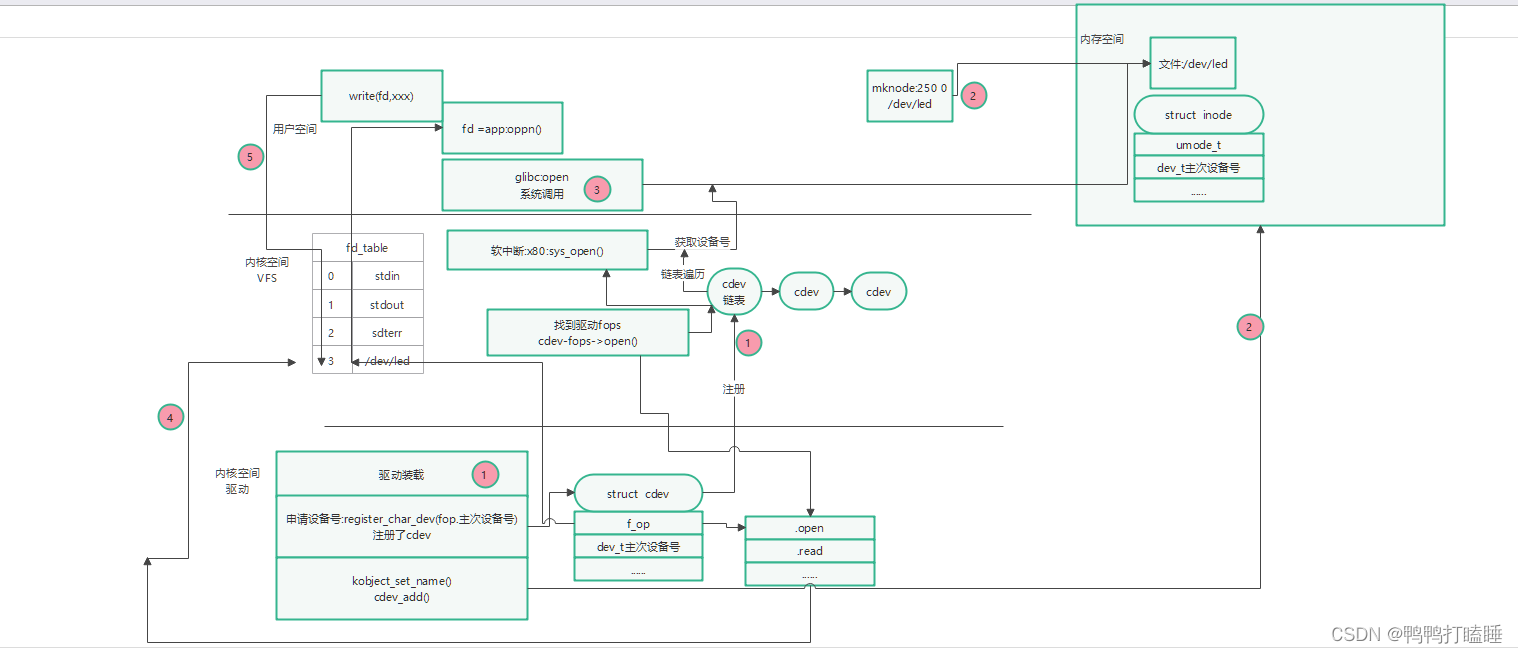
简单说明版
详细流程
第一步注册驱动
cdev结构体能看做是一个基类,那么链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的,通过cdev->list_head连接
那cdev结构体里有主次设备号
第一步 使用register_chrdev 在内核创建了新的cdev基类,同时把驱动的file_operation和主次设备号保存在cdev中
此时把cdev放入整体的链表中 : 链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的
我们的驱动中:
register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops);
struct cdev *cdev;//创造了cdev
cdev = cdev_alloc();
cdev->owner = fops->owner;
cdev->ops = fops;//cdev记录下f_op
kobject_set_name(&cdev->kobj, "%s", name); //给cdev的kobj赋值名字,也就是传入的名字
cdev_add(cdev, MKDEV(cd->major, baseminor), count);//cdev加入cdev链表cdev->dev = dev; //cdev保存主次设备号cdev->count = count;//cdev保存个设备的个数kobj_map(cdev_map, dev, count, NULL, //把这个新的dev注册进 kobj_map类型的表cdev_map中,map后续还能再升入一下exact_match, exact_lock, p); //cdev_map中就有了我们的cdevstruct probe *p;p = kmalloc_array(n, sizeof(struct probe), GFP_KERNEL); //创建新的probe来保存cdevp->owner = module;p->dev = dev;p->data = data;//cdev赋值成功
kobj_map类型 起始就是包含了一堆probe 也能叫一个probe链表
一个porbe指向另一个probe,
struct kobj_map {struct probe {struct probe *next;dev_t dev;unsigned long range;struct module *owner;kobj_probe_t *get;int (*lock)(dev_t, void *);void *data;//就保存了上面的cdev指针,这样在这个map中,cedv就连在一起了} *probes[255];struct mutex *lock;
};
第二步创建用户空间能看见的文件,也就是初始化inode节点
inode 对象:描述文件系统中的某个文件,元数据(权限,类型是否为字符设备文件这种.创建时间)
也能理解为ls -l出来的信息
crw–w---- 1 root tty 4, 1 10月 3 23:09 tty1
struct inode {
umode_t i_mode;//模式,如ls-l 出来的 crwx-rx,能区分字符设备和普通文件
kuid_t i_uid;
kgid_t i_gid;
dev_t i_rdev;//如果文件时字符设备,inode里面就有设备号,//如上面的 4 1
const struct file_operations *i_fop;
}
这里图上有两种办法1 驱动初始化后,使用mknode 手动创建一个设备节点
mknode 需要带主次设备号 是为了构造一个inode节点
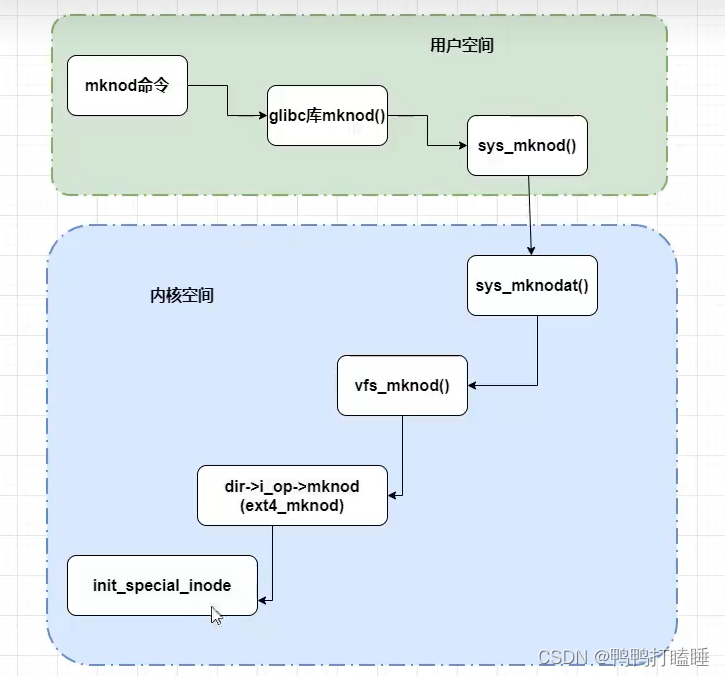
创建字符设备最后会调用到init_spectial_inode()
fs/inode.c
void init_special_inode(struct inode *inode, umode_t mode, dev_t rdev);//传入了inode节点,但是为字符设备,要继续构造inode->i_mode = mode;if (S_ISCHR(mode)) //因为是字符设备 crw--w---- 的cinode->i_fop = &def_chr_fops;//对这个inode节点的fop赋值默认的char_fop.open = chrdev_open,inode->i_rdev = rdev;另一个是cdev_add的时候使用kobj_add这些进行增加inode节点,后面找个地方细聊kobj基类,这次没看见kobj_add等函数
这一步就是为了构造出 /dev/led这个文件
第三步应用程序打开文件,第四部关联驱动的file_operation
进程打开文件 内核空间的vfs层就会生成一个struct file 对象
struct file{
struct path f_path; //文件的路径
const struct file_operations *f_op;//f_op!!!
struct inode *f_inode; //还偷偷藏了inode
unsigned int f_flags;//标志
fmode_t f_mode;//模式
loff_t f_pos;//偏移
void *private_data;//万能指针
}
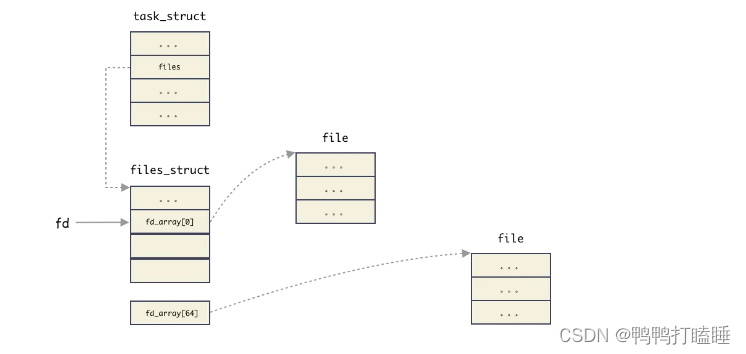
同时把这个file结构体放在 fd_table中,每个file结构体对应了这个fd_table索引号,成功后返回这个索引号
此时应用空间调用fd = open(“dev/led”, O_RDWR(标志),0666(模式)); 返回来的fd数值,也就是这个应用程序在vfs空间中对应的fd值
通过 fd_table保存了该进程打开的所有文件
应用程序:
fd = open("dev/led", O_RDWR(标志),0666(模式));
调用到glibc的open() 触发系统调用 产生0x80中断 进入内核层
vfs层:open.c
SYSCALL_DEFINE3(open, const char __user *, filename, int, flags, umode_t, mode)
上面这个系统调用的宏定义刚好就是说,建了一个系统调用的函数叫sys_open同时还传来三个参
这不就对应上了嘛
do_sys_open(AT_FDCWD, filename, flags, mode);fd = get_unused_fd_flags(flags);//找一个没有用过的fd给刚打开的文件进行分配fdstruct file *f = do_filp_open(dfd, tmp, &op);//创建了一个file结构体指针do_file_open()//pathname一层一层解析文件路径,可参考上次写的文件系统分析// 最后得到要打开文件的dentry和vfsmount,保存到结构体struct path中,// 而结构体struct path保存在struct nameidata nd变量中,nd变量也是path_openat的入参set_nameidata(&nd, dfd, pathname);// 用于根据nd寻找文件节点,并打开该文件注册的open函数filp = path_openat(&nd, op, flags | LOOKUP_RCU);//初始化filefile = alloc_empty_file(op->open_flag, current_cred());//创建一个filedo_last(nd, file, op)) > 0error = lookup_open(nd, &path, file, op, got_write);//终于寻找你的open了dentry_open(const struct path *path, int flags,const struct cred *cred)vfs_open(path, f);do_dentry_open(struct file *f, struct inode *inode,int (*open)(struct inode *, struct file *))f->f_op = fops_get(inode->i_fop);//获取inode保存的fop给file的fopopen = f->f_op->open;open(inode, f);//执行open了,这里也看得出来入参为啥是inode节点和file文件了.open = chrdev_open,//这里还有点复杂,反正最后调用了inoded的fop->open,也就是char_dev.c 的open,也是第二步赋值过来的openchrdev_open(struct inode *inode, struct file *filp)kobj = kobj_lookup(cdev_map, inode->i_rdev, &idx);//从cdev链表中,找到了kobj,关系为 kobj_map->data(cdev)->kobjcdev *new = container_of(kobj, struct cdev, kobj);//顺带就把驱动注册的cdev找出来了inode->i_cdev = p = new;//同时还把inode节点里cdev一起赋值,相当于inode也知道驱动的cdevfops = fops_get(p->ops);//拿到了驱动的fopsreplace_fops(filp, fops);//替换file的fopsret = filp->f_op->open(inode, filp);//执行驱动中的fop->open函数//进入我们的驱动里.传来的inode是这个模块的ionde,file是进程打开的这个fileint chrdevbase_open(struct inode *inode, struct file *filp)fd_install(fd, f);//关联file文件和这个fd,那我我们进程的数fd_arry中就把这个文件记录了,也把fop_改了
第五步,执行其他的write等函数
应用执行了ioctrl(fd,cmd,arg);
调用glibc的ioctrl
系统调用
0x80中断
进入内核:
VFS层 fs/ioctrl.c
SYSCALL_DEFINE3(ioctl, unsigned int, fd, unsigned int, cmd, unsigned long, arg);
ksys_ioctl(fd, cmd, arg);struct fd f = fdget(fd);//根据应用层传递的fd编号,在数组中找到file结构体do_vfs_ioctl(f.file, fd, cmd, arg);//传入file结构体,和对应的指令//从file中取出inode节点//file->dentry->inodestruct inode *inode = file_inode(filp);if (S_ISREG(inode->i_mode)) //i_noded文件类型,如果是普通文件,S_isreg regular常规的error = file_ioctl(filp, cmd, arg);else //那就是字符文件了error = vfs_ioctl(filp, cmd, arg);error = filp->f_op->unlocked_ioctl(filp, cmd, arg);
//因为file的operation在open的时候被改成我们的驱动里的了
static struct file_operations chrdevbase_fops = {unlocked_ioctl= ioctl,
}//现在就到我们驱动内部
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);代码块
driver
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : chrdevbase.c
作者 : 左忠凯
版本 : V1.0
描述 : chrdevbase驱动文件。
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/1/30 左忠凯创建
***************************************************************/#define CHRDEVBASE_MAJOR 200 /* 主设备号 */
#define CHRDEVBASE_NAME "chrdevbase" /* 设备名 */static char readbuf[100]; /* 读缓冲区 */
static char writebuf[100]; /* 写缓冲区 */
static char kerneldata[] = {"kernel data!"};/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int chrdevbase_open(struct inode *inode, struct file *filp)
{//printk("chrdevbase open!\r\n");return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t chrdevbase_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 向用户空间发送数据 */memcpy(readbuf, kerneldata, sizeof(kerneldata));retvalue = copy_to_user(buf, readbuf, cnt);if(retvalue == 0){printk("kernel senddata ok!\r\n");}else{printk("kernel senddata failed!\r\n");}//printk("chrdevbase read!\r\n");return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t chrdevbase_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 接收用户空间传递给内核的数据并且打印出来 */retvalue = copy_from_user(writebuf, buf, cnt);if(retvalue == 0){printk("kernel recevdata:%s\r\n", writebuf);}else{printk("kernel recevdata failed!\r\n");}//printk("chrdevbase write!\r\n");return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int chrdevbase_release(struct inode *inode, struct file *filp)
{//printk("chrdevbase release!\r\n");return 0;
}/** 设备操作函数结构体*/
static struct file_operations chrdevbase_fops = {.owner = THIS_MODULE, .open = chrdevbase_open,.read = chrdevbase_read,.write = chrdevbase_write,.release = chrdevbase_release,
};/** @description : 驱动入口函数 * @param : 无* @return : 0 成功;其他 失败*/
static int __init chrdevbase_init(void)
{int retvalue = 0;/* 注册字符设备驱动 */retvalue = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops);if(retvalue < 0){printk("chrdevbase driver register failed\r\n");}printk("chrdevbase init!\r\n");return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit chrdevbase_exit(void)
{/* 注销字符设备驱动 */unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);printk("chrdevbase exit!\r\n");
}/* * 将上面两个函数指定为驱动的入口和出口函数 */
module_init(chrdevbase_init);
module_exit(chrdevbase_exit);/* * LICENSE和作者信息*/
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");