📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨
📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】
📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉
📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处
文章目录
- 一、农业机器人简介
- 二、农业机器人种类
- 2.1 采摘机器人
- 2.2 喷药机器人
- 2.3 耕种、除草机器人
- 2.4 表型获取机器人
- 三、发展前景
- 3.1 国外发展现状
- 3.2 国内发展现状
- 3.2 总结
一、农业机器人简介
📢::农业机器人是指在田间、山间等环境下从事作物表型、农情巡检、病虫害检测、杂草去除、土地平整、作物采摘等任务的自主作业装备,其关键技术包括精准导航、机器视觉、智慧决策、自主行走和智能作业控制等。
📢::农业机器人是一种新兴的智能农业设备,它是一种机器,是机器人在农业生产中的运用。这种机器人可由不同的程序软件控制,以适应各种作业,能感觉并适应作物种类或环境变化,具有检测(如视觉等)和演算等人工智能的新一代无人自动操作机械。
二、农业机器人种类
2.1 采摘机器人
大田收获类机器人是指通过机器视觉等技术识别与定位、选择作业对象并依据对象特征实现差异化精准收获控制的机器人,它关注无法大规模自动化采收的对象,同时注重收获作业的高效性和适应性,弥补了农机装备在精细选择性收获作业方面装备的不足。其主要技术难点是高效、低损收获末端执行器设计与控制。
翟长远等人将无人驾驶技术、机器视觉与甘蓝收获技术结合,研制了大田甘蓝自主收获机器人(图7a),通过北斗系统定位种植行后将采收臂与甘蓝对齐、机器视觉微调后完成对行采收作业,同时通过传输通道将甘蓝运至协同运输的自动行驶车辆。美国CROO Robotics研发了大田高垄草莓收获机器人(图7b),利用草莓与茎叶的位置差异,设计了柔性茎叶和草莓果分离末端执行器和开合式硅爪采收轮,通过旋转光学相机识别定位目标草莓,实现了快速采收、输送和集箱。

2.2 喷药机器人
喷药机器人是农业机器人的一种,它通过精准的喷洒技术,帮助农民在种植作物的过程中施放适量的农药,旨在保护作物并提高产量。这种机器人的出现,解决了传统施药机械工作效率低和连续喷施作业易造成农药浪费、环境污染等问题。
喷药机器人的工作原理是这样的:在果园内,沿着喷药作业路径铺设感应电缆,对于栽苹果树这样的果园,会把感应电缆铺设在地表或者是地下(大约30米深的地方),而对于像栽种葡萄等的果园,则把感应电缆架设在空中(地上约150~200米处)。考虑到果树的距离,相邻电缆的距离最小为1.5米左右。
此外,智能喷药机器人还具有很多先进的功能。例如,它可以通过人员遥控完成果园高精度地图的创建,通过智能规划算法、多传感融合的感知算法和高精度位置控制算法可以实现自主的果园巡检和无人打药任务。
目前,全球农业机器人市场的重点主要集中在无人驾驶拖拉机、喷药无人机和挤奶机器人等领域,其中无人驾驶拖拉机和喷药无人机是我国农业机器人的主力军。随着科技的发展,我们可以预见,未来的农业将更加智能化,喷药机器人的应用也将越来越广泛。


2.3 耕种、除草机器人
耕种机器人是农业机器人的一种,主要负责在田间地头里自动播种、间苗、施肥等任务。例如,北大荒、碧桂园、博创联动等公司积极将机器人自动控制和远程联网等技术应用于农机装备,把农机变成智能联网机器人,提升农机的作业一致性及土地利用率,并且覆盖农业播种到收割全环节。
目前,全球农业机器人市场的重点主要集中在无人驾驶拖拉机、喷药无人机和挤奶机器人等领域。以美国公司Blue River Technology开发的“FarmWise”人工智能农业机器人为例,这种智能自主机器人可以解决农田中的杂草问题,为农民节省工作时间和金钱,并为消费者提供更健康的农产品。

2.4 表型获取机器人
作物表型信息获取机器人主要完成作物发育表型、作物长势、病虫草害、土壤理化性质等信息采集,可用于品种选育、田间管理、适时收获等作业决策。其主要技术难点在于种类繁多的高性价比机载传感器研发,以及田间高效巡检平台自适应快速稳定行走设计问题。
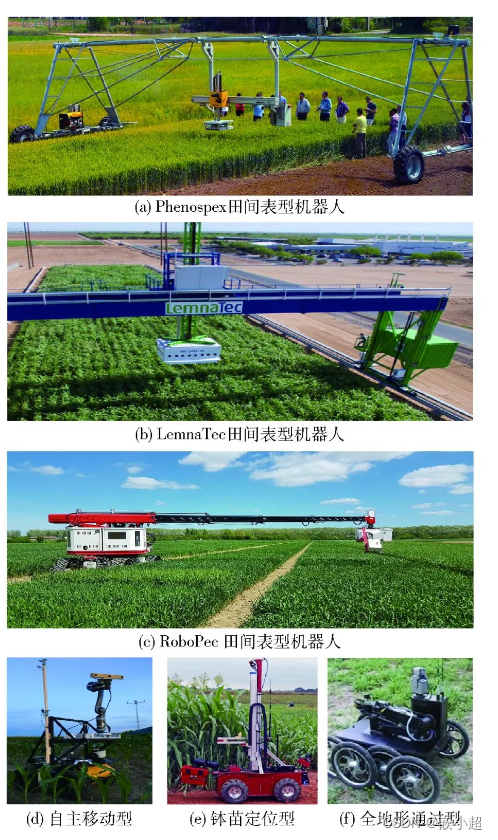
荷兰Phenospex、德国LemnaTec和法国RoboPec公司开发了龙门式和悬臂式植物表型机器人,通过叠加3D和多光谱信息准确测量最大植物高度、3D叶面积、叶片角度、光穿透深度等形态参数,具有高精准度、完全自动化、不受照明条件影响、可实现昼夜扫描等优点,实现了每天10000平方米的高通量分析(图1a~1c)。SHAFIEKHANI、MUELLER-SIM和BAO等人研制了田间移动式作物表型分析机器人,实现了作物茎秆强度及几何形态的高通量测量(图1d、1e)。上海交通大学张伟军等开发了全地形适应性田间作物巡检机器人,采用8轮错位构型与主被动复合柔性驱控算法,保障了行进过程中机载激光传感器和鱼眼相机图像获取的稳定性。
三、发展前景
具体来说,全球农业机器人的需求正在快速增长,预计到2030年将达到360亿台。各类农业机器人也在不断涌现并得到应用,比如施肥机器人、菜田除草机器人、采摘柑桔机器人、采摘蘑菇机器人、分检果实机器人、番茄收获机器人和采摘草莓机器人等。还有一些特殊功能的机器人,例如Hortibot能够自动识别并清除多达20余种杂草的除草机;AgBot Ⅱ则是一种“强智能”机器人,根据田间状况,为农耕者提供除草剂、杀虫剂、肥料以及用水的建议。
3.1 国外发展现状
近10年来,美国、英国、德国、加拿大、日本、韩国等农业发达国家高度关注智慧农业的发展,从国家层面进行战略部署,积极推进农业物联网、农业传感器、农业大数据、农业机器人、农业区块链等智慧农业关键技术的创新发展。
2015年,加拿大联邦政府预测与策划组织发布了《MetaScan3:新兴技术与相关信息图》,指出土壤与作物感应器(传感器)、家畜生物识别技术、农业机器人在未来5~10年将颠覆传统农业生产方式。
2015年,日本启动了“基于智能机械+智能IT的下一代农林水产业创造技术”项目,核心内容是“信息化技术+智能化装备”。2017年,欧洲农机工业学会提出了“农业4.0(Farming4.0)”计划,强调智慧农业是未来欧洲农业发展的方向。
2018年,美国科学院、美国工程院和美国医学科学院联合发布《面向2030年的食品和农业科学突破》报告,重点突出了传感器、数据科学、人工智能、区块链等技术发展方向,积极推进农业与食品信息化。美国国家科学技术委员会(National science and technology council,NSTC)在“国家人工智能研发战略计划”中,将农业作为人工智能优先应用发展的第10个领域,资助农业人工智能科技的中长期研发;美国农业部“2018—2022年战略规划”中,突出了农业人工智能、自动化与遥感技术的应用。
根据国际咨询机构Research and Markets分析,2019年全球智慧农业市值167亿美元,2027年将达到292亿美元,2021-2027年全球智慧农业市值年复合增长率(Compound annual growth rate,CAGR)将达到9.7%。
3.2 国内发展现状
我国的农业机器人行业正在快速发展。近年来,随着工业化进程的不断加快,我国农业机械化水平显著提高,农业机器人在农业生产中的地位越来越重要。据预测,2019年我国农业机器人市场规模从2015年的1.24亿元增长至4.97亿元,预计到2023年,这一数字将增长至8.21亿元。其中,行走系列农业机器人规模为6.19亿元,机器手系列机器人及其他规模为2.02亿元。
此外,全球农业机器人市场的重点主要集中在无人驾驶拖拉机、喷药无人机和挤奶机器人等领域,其中无人驾驶拖拉机和喷药无人机是我国农业机器人的主力军。有机构预测,2020年我国农用机器人市场规模将达到6.05亿元,2022年农用机器人市场规模达到11.46亿元,预计到2025年全球农业机器人市场总量约为93亿台,到2030年增长近4倍,达到360亿台。
3.2 总结
目前,国际上以美国为代表的大田智慧农业、以德国为代表的智慧养殖业、以荷兰为代表的智能温室生产以及以日本为代表的小型智能装备业均取得巨大进步,形成了相对成熟的技术和产品,而且还形成了商业化的发展模式,为我国发展智慧农业提供了可借鉴的经验。
目前,农业机器人正在全球范围内得到广泛应用和发展。随着大数据及技术支撑型农业的兴起,越来越多的农业机器人开始出现在大众的视野中。拥有先进人工智能(AI)技术和内置分析系统的机器人正被广泛应用于各种场合,从农作物和牛群的管理,到奶牛管理、土壤监测和整体农业产量优化等。在这些技术的辅助下,农业生产实现了可持续发展。
总的来说,农业机器人的发展和应用正在深刻改变着传统农业的生产方式,使得农业生产更加高效、环保和精准。