目录
版 本 修 订 记 录
1. 产品介绍
1.1. 什么是XM3568-EP
1.2. 产品特点
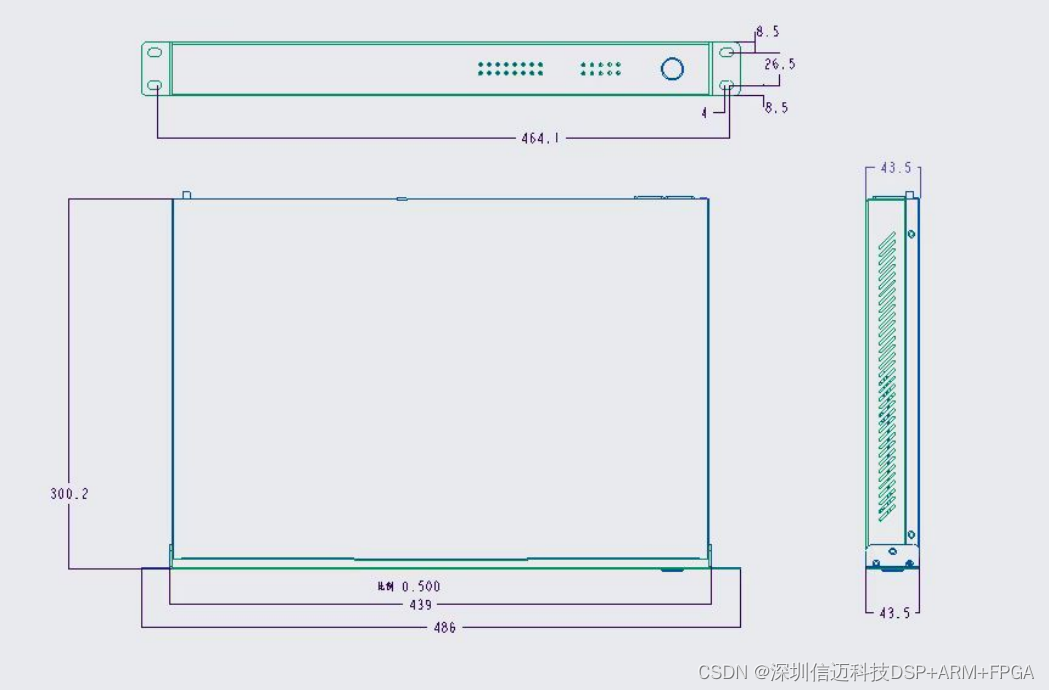
1.3. 外壳尺寸
1.4. 外壳外观
1.5. 规格参数
2. 设备使用介绍
2.1. 下载需要使用到的驱动和调试工具
2.2. 启动网关
2.3. DEBUG串口的使用方法
2.4. LED指示灯说明
3. Linux系统的使用
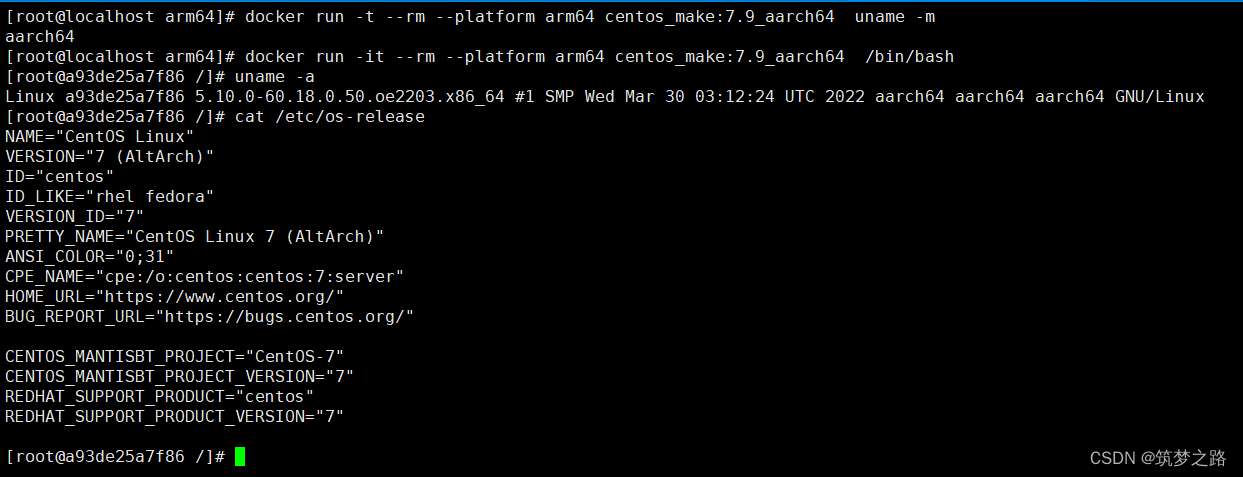
3.1. 发行版类型和内核版本
3.2. 系统预装软件
3.3. 系统默认登录账号和密码
3.4. 网络连接配置与功能测试
3.5. HDMI终端
3.6. (DI)开关量输入
3.7. (DO)开关量输入
3.8. (RS485)串口调试
3.9. (AI)模拟量采集(0.3 - 10V电压)
3.10. CAN接口
3.11. 设备唯一标识Serial ID
3.12. 增加TF扩展存储卡或SATA硬盘
4. 注意事项
XM3568-EP是集成了串口、CAN接口、开关量输入、开关量输出、AI电压采集等多种接口的边缘计算网关(以下简称:网关),也可额外扩展4G模块,SATA硬盘等插件;系统基于arm64架构;具备高可靠性的工业级处理核心;具备高处理能力的4核并发处理性能;运行Linux操作系统。
性能强悍
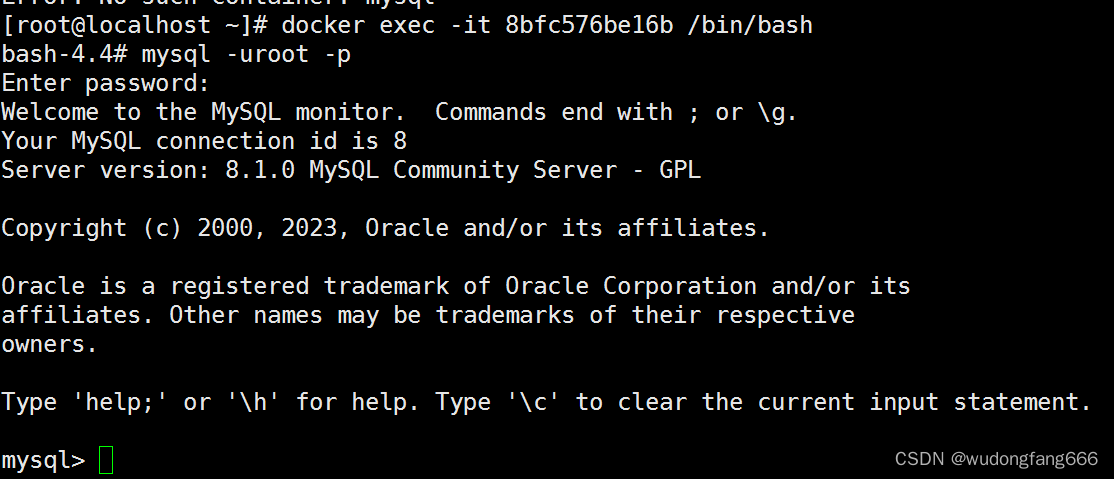
网关拥有4个1.5GHz主频的高性能核心,并内置linux 标准操作系统,不仅可以用于数据采集,也可当成常规服务器使用,根据用户自行需要,自由下载安装Mysql、Java、Chrome...等应用软件和编程语言SDK。
耐高低温和电磁兼容
网关通过GB/T2423、GB/T9254、GB/T17626等国家标准,满足各项高低温、电磁骚扰和磁场抗扰度试验等级,能够稳定运行在-20℃ ~ +70℃的环境温度和各种复杂的电磁环境下,可以适用于高速、户外园区、工业机房等各种复杂的应用场景。
接口丰富
网关集成了RS485、开关量接口、开关量输出等多个采集和控制接口,丰富的接口使得单个网关即可满足于各种工业设备的接入,无需外扩其他的采集模块。
4G通讯
网关内置4G通讯模块,默认使用DHCP功能,无需配置工具,网关上电后自动联网,方便快捷,上手快速,省去大量的人力成本。
视频输出
网关拥有HDMI高清多媒体接口,并提供多种常用视频分辨率,默认分辨率1920*1080P@60Hz,插入屏幕即可显示高清画面,并自动适配鼠标、键盘、触摸屏,使用户拥有与桌面PC相同的体验。

| 主板规格 | |
| 外观尺寸 | 439mm(L)X300.2mm(W)X43.5mm(H) |
| CPU | 四核64位1.5GHz Cortex™-A53处理器 |
| GPU | Mail G31 MP2 (OpenGL ES 3.2/2.0/1.0) |
| 内存 | 2GB (DDR3 / LPDDR4) |
| 板载存储 | 8GB EMMC |
| 以太网*2 | ETH1(10/100M)、ETH2(10/100/1000M自适应) |
| 电源 | 额定输入 AC100-240V,1.2A,50/60Hz DC120-340V,1.2A( L(+) N(-) ) |
| USB*2 | 支持2路USB2.0 |
| TYPE-C | DEBUG串口 |
| 视频输出 | HDMI2.0 (1920x1080p@60Hz/1280x720p@60Hz) |
| 实时时钟 | 1路RTC(断电下能长期记录实时时间) |
| MicroSD(TF) | 支持插入 <= 512GB 的MicroSD(TF)卡 |
| 采集接口规格(插线端子) | |
| CAN | 4路CAN(单路最高速率支持500k bps) |
| 串口 | 8路RS485 |
| 开关量输入 | 4路DI |
| 模拟量输入 | 4路AI (电压检测区间0.3 - 10V) |
| 开关量输出 | 4路DO(最高通过 AC 3A/250V,DC 3A/30V) |
| 12V直流电源输出 | 2路12V对外输出,单路最高500mA,6W |
| 选配扩展插件 | |
| 电源 | 标配1路电源模块,有2路电源版本选配 |
| 4G通讯 | 4G LTE Cat.1 无线通信模块(联网、短信、拨号) |
| SATA硬盘 | 支持512GB/1TB的2.5寸SATA硬盘 |
| 所有信号线均具有±15KV,10/700us波形浪涌6KV,8/20us波形浪涌2KV的ESD; 模块化板架构,可1U安装或配电箱安装; | |
| 网关稳定运行的环境温度应处于-20 ~ +70℃ | |
- 设备使用介绍
- 网关默认已经烧录ubuntu18.04 LTS 操作系统
- 网关有HDMI高清多媒体接口,出厂根据客户定制需求已适配了1920x1080p@60Hz或者1280x720p@60Hz的分辨率,根据实际定制信息通过HDMI高清多媒体连接线将网关连接到显示器。
- USB可以接入触摸屏、USB鼠标或键盘,用于控制网关
- 网关有以太网口,可以插入网线进行远程控制
- 网关有TYPE-C数据接口,可以连接电脑端后通过串口工具进行远程控制,具体操作方式请查看DEBUG串口的使用方法一节
- 使用标配的AC-220V电源线接入网关即可开机
- 安装DEBUG串口驱动
- 使用TYPE-C转USB数据线,连接网关的TYPE-C数据接口到电脑端的USB数据接口
- 打开MobaXterm客户端,点击Session >> Seiral ,选择相应显示的串口,波特率设置为115200,选择OK保存
- 双击左边sessions会话栏对应session,打开会话窗口
| 名称 | 功能 |
| POWER | 电源指示灯 |
| 4G | 4G运行指示灯 |
| SYS | 系统运行指示灯 |
| COM | 串口数据指示灯(RX/蓝、TX/绿) |
| DI | 开关量输入触发指示灯 |
| DO | 开关量输出继电器闭合指示灯 |
发行版类型:Ubuntu 18.04 LTS
内核版本:Linux 4.9.170 arm64
gcc编译器:aarch64-linux-gnu-gcc 7.3.0
apt install -y vim
apt install -y sudo
apt install -y libgdiplus libc6-dev # GDI图形处理库
apt install -y unzip
# 安装桌面环境和浏览器
apt install -y chromium-browser #297MB
apt install -y xserver-xorg #40.6MB
apt install -y xinit #58.4KB
apt install -y xterm #2188KB
apt install -y matchbox-window-manager #584KB
# 安装中文环境
apt install -y xfonts-intl-chinese
apt install -y ttf-wqy-zenhei #文泉驿-正黑
apt install -y xfonts-wqy #文泉驿-点阵宋体*
- pip数据源
pip install pyserial
pip install pymysql
pip install pexpect
pip install sanic
| 账号 | 密码 | 权限等级 |
| root | 123456 | 超级管理员 |
| system | system | 备用账号 |
| 以太网 | 默认IP | 说明 |
| eth0 | DHCP | 4G通讯模块(需选配) |
| eth1 | 192.168.1.177 | ETH百兆以太网 |
| eth2 | 192.168.2.177 | ETH千兆以太网 |
目前常见的 Linux 发行版使用的网络管理服务有数种,网关默认使用最为常规的systemd-networkd.service网络管理服务,配置文件的目录及文本内容如下所示。
vi /etc/systemd/network/eth1.network
### 以下是文本内容
[Match]
Name=eth1
[Network]
Address=192.168.1.177/24
DNS=114.114.114.114
[Gateway]
Gateway=192.168.1.1
Destination=192.168.1.0/24
### 文本内容结束
vi /etc/systemd/network/eth2.network
### 以下是文本内容
[Match]
Name=eth2
[Network]
Address=192.168.2.177/24
DNS=114.114.114.114
[Gateway]
Gateway=192.168.2.1
Destination=192.168.2.0/24
### 文本内容结束
当配置好对应需要的IP之后,在文本内使用:wq保存退出文件,之后只需重启网关或者使用systemctl restart systemd-networkd命令重启网络管理服务,设置IP即可生效。配置文件更多配置参数可参考http://www.jinbuguo.com/systemd/systemd.network.html#
网关目前支持1920x1080p@60Hz或者1280x720p@60Hz的分辨率,通过修改配置文件/boot/uEnv.txt来调整分辨率。
vi /boot/uEnv.txt
### 以下是文本内容
screen0_output_mode=10
dev0_output_mode=10
fb0_width=1920
fb0_height=1080
### 文本内容结束,修改分辨率按照文本内容复制粘贴替换
### 修改分辨率为1280*720@60Hz
screen0_output_mode=5
dev0_output_mode=5
fb0_width=1280
fb0_height=720
### 修改分辨率为1920*1080@60Hz
screen0_output_mode=10
dev0_output_mode=10
fb0_width=1920
fb0_height=1080
### 修改分辨率为800*1280@60Hz
screen0_output_mode=69
dev0_output_mode=69
fb0_width=800
fb0_height=1280
备注:若需要将800*1280@60Hz分辨率横屏显示,需要将/etc/X11/ 目录下的xorg.conf.bak 和xorg.conf.d/40-libinput.conf.bak重命名为xorg.conf和xorg.conf.d/40-libinput.conf。
网关默认使用/opt/scripts/boot/view.sh来配置开机显示程序画面,如需修改默认开机显示程序及端口,可自行修改该文件。
vi /opt/scripts/boot/view.sh
### 以下是文本内容
#! /bin/bash
export DISPLAY=:0
nohup xinit matchbox-window-manager > /dev/null 2>&1 &
# 演示版web 应用, 占用了80端口, 可自行注释或删除行
nohup python /opt/scripts/boot/web.py > /dev/null 2>&1 &
# 打开chromium浏览器,访问网址
nohup chromium-browser --no-sandbox --kiosk --app="http://127.0.0.1:80" > /dev/null 2>&1 &
sleep 5s
# xset 需要等桌面服务启动后才能设置
# xset s 10 600
# 10秒后进入屏保
xset s off # 关闭屏保
# xset dpms 0 0 0 # 设置电源管理 standby, suspend, off
xset -dpms # 关闭电源管理 +dpms 开启电源管理
### 文本内容结束
配置文件调用chromium 浏览器打开http://127.0.0.1:80网址,显示页面如下:
网关共有4个DI接口,对应rootfs空间下的设备节点/dev/di,并且仅支持只读模式。简单测试指令可以使用cat 指令直接读取/dev/di 设备节点。
cat /dev/di
### 以下是返回文本
0x0ff1
### 以下是解析说明
# 0x0ff1 即换算成2个字节,即16位bit 0000 ffff ffff 0001
# 高12位bit保留
# 以此解析(高位在前),此时bit0置0,网关面板应是DI1与地短接
以下为代码调用,仅以C语言作为示例
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
void main(void){
int fd = 0;
unsigned char hex_buf[2] = {0, 0};
fd = open("/dev/di", O_RDONLY);
if (fd < 0)
{
printf("error\n");
return;
}
// 对于DI,最多读取2个字节,高位在前
read(fd, hex_buf, 2);
printf("0x%02X%02X\r\n", hex_buf[0], hex_buf[1]);
}
网关共有4个DO接口,对应rootfs空间下的设备节点/dev/do设备节点,支持读写模式。简单测试指令可以使用echo 及cat 指令直接读写设备节点
echo 0x01 > /dev/do
### 以下是解析说明
# 1 继电器闭合 0 继电器断开
# 0x01 = 0000 0001
# 继电器DO1 闭合 其余继电器断开
以下为代码调用,仅以C语言作为示例
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
void main(void){
int fd = 0;
unsigned char hex_buf[1] = {0};
fd = open("/dev/do", O_RDWR);
if (fd < 0)
{
printf("error /dev/do\n");
return;
}
// 对于DO,最多读写1个字节,高位在前
read(fd, hex_buf, 1);
printf("0x%02X\r\n", hex_buf[0]);
hex_buf[0] = 1;
write(fd, hex_buf, 1);
}
网关共有8路RS485串口。8路串口最高可支持115200波特率。
网关面板与设备节点对应关系
| 面板标识 | 设备节点 |
| A1B1 | /dev/com1 |
| A2B2 | /dev/com2 |
| A3B3 | /dev/com3 |
| A4B4 | /dev/com4 |
| A5B5 | /dev/com5 |
| A6B6 | /dev/com6 |
| A7B7 | /dev/com7 |
| A8B8 | /dev/com8 |
网关共有4个AI接口,对应rootfs空间下的设备节点/dev/adc设备节点,支持串口读写模式。
(波特率: 9600 数据位: 8 校验位: None 停止位: 1)
串口每隔约300毫秒接收一段AI接口电压数据,字节内容及数据解析如下:
01 03 00 00 00 00 12 cf 00 00 0d 0a
// 串口每隔300毫秒接收12个字节数据
// 以 0x01 0x03开头,以0x0d 0x0a (\r\n)结尾
// 常规编程语言可以使用readline()等函数按行接收数据,以保证数据不粘包
// 电压数据单位mV
// 中间8个字节从左到右每2个字节代表1个AI接口电压值
如以上接收内容转化为实际电压值
AI1: 0x0000
AI2: 0x0000
AI3: 0x12cf = 4815 mV
AI4: 0x0000
网关共有4路CAN接口,CAN接口支持5k、10k、20k、25k、40k、50k、80k、100k、125k、200k、250k、400k、500k等波特率,支持远程帧和扩展帧,暂不支持过滤器。
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <stdint.h>
uint8_t BBC(uint8_t *data, uint16_t len)
{
uint8_t value = 0;
uint16_t i;
for (i = 0; i < len; i++)
{
value ^= data[i];
}
return value;
}
int main(void)
{
__u8 buf[8] = {0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38};
int sock_fd, i, j;
unsigned long nbytes, len;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
/*建立套接字,设置为原始套接字,原始CAN协议 */
sock_fd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
/*以下是对CAN接口进行初始化,如设置CAN接口名,即当我们用ifconfig命令时显示的名字 */
strcpy((char *)(ifr.ifr_name), "can1");
ioctl(sock_fd, SIOCGIFINDEX, &ifr);
printf("can0 can_ifindex = %x\n", ifr.ifr_ifindex);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
/*将刚生成的套接字与CAN套接字地址进行绑定*/
bind(sock_fd, (struct sockaddr*)&addr, sizeof(addr));
/*设置CAN帧的ID号,可区分为标准帧和扩展帧的ID号*/
frame.can_id = 0x1122;
// strcpy((char *)frame.data,"1234567");
// frame.can_dlc = strlen(frame.data);
memcpy(frame.data, buf, 8);
frame.can_dlc = 8;
printf("Send a CAN frame from interface %s\n", ifr.ifr_name);
/*开始发送数据*/
nbytes = sendto(sock_fd, &frame, sizeof(struct can_frame), 0, (struct sockaddr*)&addr, sizeof(addr));
printf("nbytes %ld!\n", nbytes);
i = 0;
while (i < 10)
{
nbytes = read(sock_fd, &frame, sizeof(struct can_frame));
printf("nbytes %ld!\n", nbytes);
if (nbytes < 0)
{
printf("can raw socket read");
close(sock_fd);
return 1;
}
else
{
/*将接收到的CAN数据打印出来,其中ID为标识符,DLC为CAN的字节数,DATA为1帧报文的字节数*/
printf("CAN frame:\n ID = %x\n DLC = %x\n DATA = %s\n",frame.can_id,frame.can_dlc,frame.data);
for(j=0; j<frame.can_dlc; j++)
printf("%02x ", frame.data[j]);
printf("\n");
}
i++;
}
close(sock_fd);
return 0;
}
使用cat 指令读取设备唯一标识
cat /proc/cpuinfo |grep "Serial"|awk {'print $3'}
扩展TF卡和SATA硬盘操作方式一致,故以TF卡为例。设备TF卡扩展插槽支持安装TF(MicroSD)卡增加扩展存储,理论扩展存储无上限,实测过安装容量512G的TF卡可以稳定运行(SATA硬盘容量实测支持1TB)。
扩展SATA硬盘读写速率如下:
### 测试SATA硬盘读写速率(1Gb)
### 1. 测试目录所在磁盘的写入速度
time dd if=/dev/zero bs=1024 count=1000000 of=./1Gb.file
1024000000 bytes (1.0 GB, 977 MiB) copied, 30.2637 s, 33.8 MB/s
### 2. 测试目录所在磁盘的读出速度
time dd if=./1Gb.file bs=1024 of=/dev/null
1024000000 bytes (1.0 GB, 977 MiB) copied, 32.7612 s, 31.3 MB/s
- 安装时切勿带电工作。
- 请勿使用有机溶剂或腐蚀性液体清洗网关。
- 交流电源输入AC100~240V 或直流电源输入DC120-340V,建议使用安规认证的电源线。
- 请遵循所有标注在网关及网关相关说明上的警示和指引信息。
- 请保持网关干燥,如果不慎被任何液体泼溅或浸润,请立刻断电并充分晾干。
- 使用中注意网关的通风散热,避免温度过高造成元器件损坏。
- 请勿在多尘、脏乱的环境中使用或存放网关。
- 请勿粗暴对待网关,跌落、敲打或剧烈晃动都可能损坏线路及元器件。
- 请勿自行修理、拆卸本公司产品,如网关出现故障请及时联系本公司进行维修,擅自修改或使用未经授权的配件可能损坏网关,由此造成的损坏将不予以保修。




![一、PHP环境搭建[phpstorm]](https://img-blog.csdnimg.cn/2e76ed6278314a99890a21337e7fa99a.png)