具身智能已成为近年来研究的热点领域之一。具身智能强调将智能体与实体环境相结合,通过智能体与环境的交互,来感知和理解世界,最终实现在真实环境中的自主决策和运动控制。
如何基于文心大模型,低成本入门“具身智能”,并用身边的普通硬件就能快速搭建“能理解、会决策”的实物智能体呢?为此,我们做出了一些初步的尝试,让文心大模型取代状态机设计,成为决策的中枢,上承感知,下启控制,完成较为完整的闭环通路。

大模型驱动智能汽车demo
未来,欢迎与开发者共同探索更多围绕“具身智能”接地气、低成本和高可用的案例任务,并发起相关竞赛,和大家一起玩转大模型+科创硬件!

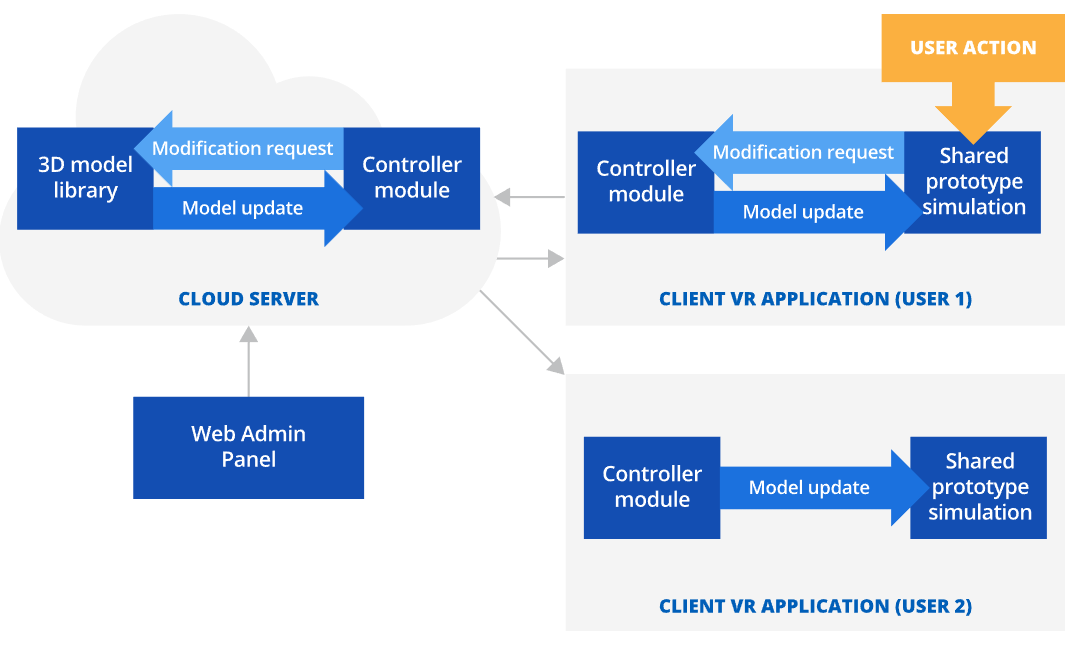
智能体与环境之间的闭环控制
欢迎各位同学扫描海报下方二维码积极参与哦~~