数据卷 Volume: 目录映射, 目录挂载
匿名绑定:
匿名绑定的 volume 在容器删除的时候, 数据卷也会被删除, 匿名绑定是不能做到持久化的, 地址一般是 /var/lib/docker/volumes/xxxxx/_data
绑定卷时修改宿主机的目录或文件, 容器内的数据也会同步修改, 反之亦然
# 查看所有 volume
docker volume ls# 用法: -v [容器内目录] 仅仅指定容器内的目录, 不指定宿主机的目录, 默认会自动创建一个匿名卷
docker run -d -p 80:80 --rm --name nginx_volume01 -v /usr/share/nginx/html nginx# 查看卷详情
docker inspect nginx_volume01 # 里面 Mounts 的关键词就是 映射卷信息
docker volume ls
具名绑定:
具名绑定与匿名绑定是类似的, 只是具名绑定会指定一个名字, 具名绑定卷在容器删除的时候, 数据卷不会删除, 具名绑定是可以做到持久化的, 路径一般是 /var/lib/docker/volumes/xxxxx/_data
# 用法: -v [卷别名]:[容器内目录] 指定卷名和容器内的目录, 创建后由docker统一管理
docker run -d -p 80:80 --rm --name nginx_volume02 -v nginx_test:/usr/share/nginx/html nginx# 查看卷详情
docker inspect nginx_volume02
docker volume ls # 会查到一个名字为 nginx_test 的卷# 重新创建新的容器并使用持久化挂载卷
## 先进行删除
docker stop nginx_volume02
docker rm nginx_volume02## 重新创建新的容器并使用持久化挂载卷
docker run -d -p 80:80 --rm --name nginx_volume -v nginx_test:/usr/share/nginx/html nginx## 查看
docker inspect nginx_volume
docker volume ls
Bing Mount:
前面两种方式都是docker内部自动管理这些卷的, 但是bing mount是手动管理这些卷的, 也就是手动指定宿主机的目录和容器内的目录
# 用法: -v [宿主机的目录]:[容器内的目录] 指定宿主机的目录和容器内的目录
# 可以映射多个目录, 一个 -v 只能映射一个目录, 多个目录需要多个 -v
docker run -d -p 80:80 --rm --name nginx_volume03 -v /root/projects/www/nginx_test:/usr/share/nginx/html nginx# 查看卷详情
docker inspect nginx_volume03
docker volume ls
volume 的常用命令
# 查看帮助
docker volume --help# 列出所有 volume
docker volume ls# 查看卷详情
docker volume inspect [卷名]# 删除一个 volume
docker volume rm [卷名]# 清理无用的 volume
docker volume prune
网络配置 Network
- 提供了多种模型, 可以定制化为每个容器制定不同的网络
- 自定义网络模式, 划分不同的子网以及网关, dns等配置
- 网络互通
- 实现不同子网之间的网络互通
- 基于容器名(主机名)的方式在网络内访问
网络模式
bridge 模式 (桥接模式), 默认使用
在主机中创建一个 docker0 的虚拟网桥(虚拟交换机), 在 docker0 创建一对虚拟网卡, 有一半在宿主机上 vethxxxx, 还是一半在容器内 eth0

bridge 模式 容器互联通信
# 启动两个容器, 用于测试两个容器之前的通信
docker run -d -P --rm --name centos_network1 centos tail -f /dev/null
## tail -f /dev/null 是让容器启动时运行的命令, 为了让容器一直运行, 不退出# 使用 --link 参数, 让两个容器之间建立连接
docker run -d -P --rm --name centos_network2 --link centos_network1 centos tail -f /dev/null# 测试两个容器是否可以通信
docker exec -it centos_network2 ping centos_network1 # 由于 centos_network2 link centos_network1, 所以可以通信
docker exec -it centos_network1 ping centos_network2 # 但是 centos_network1 不能 ping centos_network2, 因为 --link 参数是单向的# 参看容器的详细信息
docker inspect centos_network1
docker inspect centos_network2
host 模式 (主机模式)
容器将不会获得一个独立的网络命名空间, 而是和宿主机共享网络命名空间, 容器将不会虚拟出自己的网卡以及配置自己的 IP 等, 那么基于该模式启动的容器对应的ip实际就是与宿主机同一个子网, 同一个网段
192.168.113.1 --> 192.168.113.x

none 模式
docker 会拥有自己的网络空间, 不与宿主机共享, 在这个网络模式下的容器, 不会被分配网卡 ip 路由等相关信息
特点: 完全隔离, 与外部任何机器都无网络访问, 只有自己的本地网络lo网卡, 即127.0.0.1

container 模式
新建的容器和已经存在的一个容器共享一个网络命名空间, 新的容器不会创建自己的网卡以及配置自己的 IP, 而是和指定的容器共享 IP, 端口范围等. 同样, 新的容器也不能访问已经存在的容器, 两者除了网络方面, 其他方面都是独立的

自定义网络模式(推荐)
不使用docker自带的网络模式, 而是自己去定制化自己特有的网络模式, 比如划分不同的子网, 网关, dns等配置
- 自定义网络模式, 划分不同的子网以及网关, dns等配置
- 网络互通
- 实现不同子网之间的网络互通
- 基于容器名(主机名)的方式在网络内访问
自定义网络创建
- 查看主机的网络
# 查看网络的命令
ifconfig
# 或
ip addrdocker network [Command]
# 如:
docker network --help
docker network ls
- 创建自定义网络
# 创建自定义网络
docker network create --help## 创建一个名为 wolfcode的网络, 子网为 192.168.30.0/24, 网关为 192.168.30.1
docker network create --driver bridge --subnet 192.168.30.0/24 --gateway 192.168.30.1 wolfcode
# --driver bridge 指定网络模式为 bridge 模式, docker默认就是 bridge 模式, 可以不写
# --subnet 192.168.30.0/24 指定子网, 桥接模式可以自定义, 但注意子网尽量不要和宿主机的子网冲突(可以使用 ifconfig/ip addr 查看宿主机的子网)
# --gateway 192.168.30.1 指定网关, 网关的ip地址需要和子网在同一个网段
# wolfcode 自定义网络名称# 查看网络是否在里面
docker network ls# ifconfig 或 ip addr 也可以查看网络
ifconfig
# 或
ip addr
- 自定义网络启动容器
# 启动一个 nginx 容器, 指定网络为 wolfcode
docker run -d -p 3001:80 --rm --name nginx_network1 --net wolfcode nginx
## --net wolfcode 指定网络模式为使用自定义的 wolfcode 网络
## 启动容器时指定网络 --net# 查看容器网络详情
docker inspect nginx_network1# 进入容器内部看网络相关的信息
docker exec -it nginx_network1 /bin/bash
ip addr
## 有些容器没有 ip addr 命令, 可以使用参看 hosts 文件的方式查看容器内部的主机名对应的ip地址是否与自定义网络配置一致
cat /etc/hosts
容器互联通信
# 启动两个 centos 容器, 指定网络为 wolfcode, 测试容器之间是否可以相互通信
docker run -d -P --rm --name centos_network1 --net wolfcode centos tail -f /dev/null
docker run -d -P --rm --name centos_network2 --net wolfcode centos tail -f /dev/null
## -P 随机端口映射
## --net wolfcode 指定网络模式为使用自定义的 wolfcode 网络
## centos 是镜像名称
## tail -f /dev/null 是为了让容器一直运行, 否则容器会自动停止# 查看容器的网络详情
docker inspect centos_network1
docker inspect centos_network2# 进入容器内部看网络相关的信息
docker exec -it centos_network1 /bin/bash
cat /etc/hosts
## 192.168.30.2 centos_network1# 也可以使用 ifconfig 或 ip addr 查看网络信息
ifconfig
# 或
ip addr# 在 centos_network1 容器内部 ping centos_network2, 测试容器之间是否可以基于主机名相互通信
ping centos_network2# 也可以直接使用docker exec -it 使用容器执行ping命令
docker exec -it centos_network1 ping centos_network2
## ping centos_network2 是ping centos_network2 的主机名, 而不是ip地址, 测试容器之间是否可以基于主机名进行通信
不同网络下容器互相通信

测试: 默认的bridge网络容器和自定义的wolfcode网络容器通信问题
# 使用不同的两个网络模式启动两个容器, 测试容器之间是否可以相互通信
# 启动一个 centos 容器, 默认网络为 bridge
docker run -d -P --rm --name centos_network1 centos tail -f /dev/null# 启动一个 centos 容器, 自定义网络为 wolfcode
docker run -d -P --rm --name centos_network2 --net wolfcode centos tail -f /dev/null# 查看容器的网络详情
docker inspect centos_network1
docker inspect centos_network2# 尝试 centos_network2 去 ping centos_network1, 测试容器之间是否可以相互通信
docker exec -it centos_network1 ping centos_network2
## 或
docker exec -it centos_network1 ping 192.168.30.2
## 结果: 两种方式都无法ping通, 因为两个容器不在同一个网络下, 无法相互通信
解决方案: docker network connect
# 将 centos_network1 容器连接到 wolfcode 网络下
docker network connect wolfcode centos_network1# 查看容器的网络详情
docker inspect centos_network1
docker inspect centos_network2# 尝试 centos_network2 去 ping centos_network1, 测试容器之间是否可以相互通信
docker exec -it centos_network1 ping centos_network2
## 或
docker exec -it centos_network1 ping 192.168.30.2
## 结果: 可以ping通, 因为两个容器在同一个网络下, 可以相互通信
Dockerfile
Dockerfile 常见的命令
dockerfile 官方文档
FROM: 指定基础镜像
在 Dockerfile 中,FROM 是指定基础镜像的指令,也是所有 Dockerfile 的开头命令。该命令用于设置构建镜像所依赖的基础镜像。
细节和用法说明
-
功能:
- 指定当前镜像所基于的基础镜像。
- 基础镜像必需是 Docker Hub 上的公开镜像或自定义镜像仓库中的镜像。
- Dockerfile 中每个阶段的多阶段构建可以有多个
FROM,但每个阶段只能有一个FROM。
-
语法:
- 基础语法:
FROM <镜像名>[:<版本标识>] [AS <阶段名称>]
- 基础语法:
-
示例:
-
指定 CentOS 7 为基础镜像:
FROM centos:7 -
指定 Ubuntu 最新版本为基础镜像(
latest是默认标签):FROM ubuntu -
使用多阶段构建(命名阶段):
FROM node:16 AS builder RUN npm install
-
MAINTAINER: 指定镜像的作者
MAINTAINER 是 Dockerfile 中的旧指令,用于声明镜像创建者的信息(比如姓名和邮箱)。不过这个指令已经被弃用,建议使用 LABEL 指令来代替。
细节和用法说明
-
功能:
- 指定镜像的维护者,方便镜像的使用者进行联系或了解镜像作者信息。
- 建议使用
LABEL maintainer="作者信息"来替代。
-
语法:
MAINTAINER <作者信息> -
示例:
-
使用
MAINTAINER指令指定作者名与邮箱:MAINTAINER wolfcode <wolfcode@wolfcode.cn> -
替代写法(推荐):
LABEL maintainer="wolfcode <wolfcode@wolfcode.cn>"
-
LABEL: 指定镜像的标签元数据
LABEL 指令用于为镜像添加描述性元数据,如版本、作者、描述信息等。
细节和用法说明
-
功能:
LABEL为镜像添加键值对类型的元数据。- 可以为镜像添加多条
LABEL信息,也可以在一条LABEL指令中定义多个键值对。
-
语法:
-
单条
LABEL语法:LABEL <key>=<value> -
多条
LABEL:LABEL <key1>=<value1> <key2>=<value2> -
推荐换行书写:
LABEL key1=value1 \key2=value2 \key3=value3
-
-
示例:
-
添加版本和描述信息:
LABEL version="1.0" LABEL description="This is a test Dockerfile" -
使用换行格式:
LABEL version="1.0" \description="This is a test" \maintainer="Name <name@example.com>"
-
ENV: 在容器中设置环境变量
ENV 指令用于在容器构建过程中设置环境变量。设置的变量可以在运行时通过 $NAME 引用,也会影响到所有后续的指令。
细节和用法说明
-
功能:
- 在容器中设置环境变量,让变量可以在整个容器内被引用或用作配置参数。
- 允许在执行指令时引用环境变量,例如设置
PATH。
-
语法:
-
设置单个环境变量:
ENV <key> <value> -
设置多个环境变量:
ENV key1=value1 key2=value2 ...
-
-
示例:
-
设置
JAVA_HOME和更新PATH:ENV JAVA_HOME /usr/local/java/jdk1.8.0_181 ENV PATH $PATH:$JAVA_HOME/bin -
一次性设置多个变量:
ENV JAVA_HOME=/usr/lib/java PATH=$PATH:$JAVA_HOME/bin -
在运行时可通过
echo查看:docker run --rm my-image bash -c "echo $JAVA_HOME"
-
RUN: 容器中执行 Shell 命令
RUN 指令用于在镜像构建过程中执行命令。每个 RUN 都会创建一个新的镜像层。
细节和用法说明
-
功能:
- 在镜像构建过程中执行命令,例如安装依赖、修改配置文件等。
- 可以通过 shell 或 exec 形式运行指令。
-
语法:
-
Shell 形式(默认):
RUN <command> -
Exec 形式(推荐,当需要精确控制参数时):
RUN ["<executable>", "<param1>", "<param2>", ...]
-
-
示例:
-
使用 yum 安装
vim:RUN yum install -y vim -
执行多个命令:
RUN mkdir -p /app && cd /app && touch test.txt -
使用 Exec 形式:
RUN ["apt-get", "install", "-y", "curl"]
-
ADD: 复制并自动解压文件
ADD 指令用于将宿主机的文件复制到容器中,同时支持自动解压(比如 zip)。ADD 可以从 URL 下载资源。
细节和用法说明
-
功能:
- 将本地或远程文件添加到镜像中。
- 如果源为压缩文件(如
.tar.gz),会自动解压到目标路径。
-
语法:
ADD <src> <dest> -
示例:
- 单文件复制:
ADD ./data.txt /app/ - 自动解压
zip文件:ADD ./data.zip /app/
- 单文件复制:
COPY: 纯粹复制文件(不会解压)
COPY 是用于将主机上的文件和目录复制到镜像中,与 ADD 类似,但不支持 URL 或解压功能。
细节和用法说明
-
功能:
- 将本地文件复制到镜像中,简单且纯粹,不提供额外解压功能。
-
语法:
COPY <src> <dest> -
示例:
COPY ./data.txt /app/
WORKDIR: 指定工作目录
WORKDIR 用于设置容器中的工作目录。如果路径不存在,会自动创建。
细节和用法说明
-
功能:
- 指定接下来指令的工作目录(如
COPY、RUN等)。
- 指定接下来指令的工作目录(如
-
语法:
WORKDIR /path/to/dir -
示例:
WORKDIR /app RUN touch file.txt
VOLUME:
在 Dockerfile 中,VOLUME 指令用于声明一个或多个可以挂载数据的挂载点(Mount Point),这些挂载点对应于容器中的目录。通过使用 VOLUME,你可以确保这些目录中的数据可以被独立保存,即使容器被移除,数据仍然可以持久化。
细节和用法说明
-
功能:
- 它在容器运行时定义了一个挂载点。注意,
VOLUME指令本身并不会把宿主机的路径挂载到容器中,而是告诉 Docker,这些指定的路径应该被挂载为匿名卷。 VOLUME声明的目录默认会生成一个 Docker 卷,并将其挂载到容器中指定的路径。- 后续在
docker run阶段,你可以通过-v或--mount参数,将自定义的宿主机目录挂载到这些挂载点来覆盖 Docker 默认生成的卷。
- 它在容器运行时定义了一个挂载点。注意,
-
语法:
- 单路径声明:
VOLUME <路径> - 多路径声明(以空格分隔):
VOLUME <路径1> <路径2> ... - JSON 数组形式声明:
VOLUME ["<路径1>", "<路径2>", ...]
# 单路径声明 VOLUME /data# 多路径声明 VOLUME /data1 /data2# 使用 JSON 数组形式 VOLUME ["/data", "/data2"] - 单路径声明:
-
运行时挂载:
- 当你在 Dockerfile 中使用
VOLUME后,如果运行容器时没有特别指定挂载点(未使用-v或--mount参数),Docker 会自动为这些路径创建匿名卷(Anonymous Volumes)。这些卷存储的数据会被独立保存,并不依赖容器的生命周期。 - 如果运行容器时使用
-v <主机目录>:<容器目录>或--mount,你可以将宿主机目录挂载到VOLUME声明的路径中。
- 当你在 Dockerfile 中使用
-
注意事项
-
镜像构建阶段不能往 VOLUME 声明的路径写入文件:
- 在 Dockerfile 中,一旦路径被
VOLUME声明后,在后续的构建中,无法再对这些路径写入文件,因为这些路径的数据源已经被抽象为外部卷。
- 在 Dockerfile 中,一旦路径被
-
使用默认匿名卷可能会增加清理复杂性:
- 如果你不明确指定挂载路径,Docker 会创建匿名卷,并可能随着容器增多而占用存储空间。因此,推荐在
docker run阶段明确指定宿主机路径或命名卷,避免创建难以管理的匿名卷。
- 如果你不明确指定挂载路径,Docker 会创建匿名卷,并可能随着容器增多而占用存储空间。因此,推荐在
-
-
简单示例分析
Dockerfile
FROM ubuntu:latest
VOLUME /data
CMD ["echo", "Data Volume Example!"]
构建镜像
docker build -t volume-example .
默认情况下运行容器
docker run --name my-container volume-example
- 此时 Docker 会为
/data路径自动创建匿名卷进行挂载。 - 可以通过以下命令查看卷:
docker inspect my-container
自定义挂载:
docker run --name custom-container -v /my/local/path:/data volume-example
- 此时
/my/local/path(宿主机目录)会挂载到容器中的/data路径。
EXPOSE: 指定容器暴露的端口
在 Dockerfile 中,EXPOSE 指令用于声明容器对外暴露的端口,以便外部与容器进行网络通信。EXPOSE 声明的端口并不会自动映射到宿主机,需要运行时通过 -p 标志手动指定映射规则。
细节和用法说明
-
功能:
- 定义运行容器时的监听端口(仅声明作用,未做实际端口映射)。
- 容器启动后,通过运行参数与宿主机的端口进行映射。
-
语法:
EXPOSE <端口号> EXPOSE <端口号>/<协议> # 可选协议为 TCP 或 UDP,默认为 TCP -
示例:
-
声明容器监听的 8080 端口(TCP 协议):
EXPOSE 8080 -
声明容器同时监听 TCP 和 UDP 协议的 8080 端口:
EXPOSE 8080/tcp EXPOSE 8080/udp
-
-
运行时端口映射:
- 手动将容器暴露的端口与宿主机端口绑定:
上述命令会将宿主机的 8080 端口映射到容器监听的 8080 端口。docker run -p 8080:8080 my-image
- 手动将容器暴露的端口与宿主机端口绑定:
CMD: 指定容器启动时执行的默认命令
CMD 指令用于在容器启动时指定默认执行的命令。如果使用 docker run 时传入其他命令,CMD 指定的命令将被覆盖。
细节和用法说明
-
功能:
- 为容器启动执行一个默认的命令和参数。
- 如果 Dockerfile 中有多个
CMD指令,只有最后一个生效。 CMD是运行时命令,而非构建镜像时的命令。
-
语法:
-
Shell 形式:
CMD <command> -
Exec(数组)形式(推荐):
CMD ["executable", "参数1", "参数2", ...] -
与
ENTRYPOINT联合使用:CMD ["参数1", "参数2", ...]
-
-
示例:
-
使用 Shell 形式:
CMD ls -al -
使用 Exec(数组)形式:
CMD ["ls", "-al"] # 或者 CMD ["sh", "-c", "ls -al"] -
输出信息:
CMD echo "hello, docker"
-
ENTRYPOINT: 执行容器的入口点命令
ENTRYPOINT 指令用于定义容器启动时的主程序(不可覆盖)。如果运行时希望加入额外参数,可以与 CMD 配合使用。
细节和用法说明
-
功能:
- 用于定义容器启动时的固定命令,并以其作为入口点。
- 可以和
CMD联合使用,固定的部分由ENTRYPOINT定义,动态参数由CMD定义。
-
语法:
-
Exec(数组)形式(推荐):
ENTRYPOINT ["executable", "参数1", "参数2", ...] -
Shell 形式:
ENTRYPOINT <command>
-
-
示例:
-
固定使用
echo执行输出命令:ENTRYPOINT ["echo", "Hello"] # 或者 ENTRYPOINT ["sh", "-c", "echo Hello"] -
配合
CMD使用:ENTRYPOINT ["python3"] CMD ["app.py"]- 启动容器时将最终运行:
python3 app.py
- 启动容器时将最终运行:
-
USER: 指定容器内的用户
USER 指令用于指定容器内后续指令的执行用户,默认用户为 root。
细节和用法说明
-
功能:
- 更改构建和运行容器时的用户和用户组。
- 以非
root用户运行容器可以提升安全性。
-
语法:
USER <用户名>[:<用户组>] -
示例:
-
切换为
nobody用户:USER nobody -
设置用户和用户组:
USER stu:group1
-
ARG: 构建参数
ARG 指令用于声明镜像构建时可用的变量,这些变量仅在构建过程中有效,不会包含在最终镜像中。
细节和用法说明
-
功能:
- 定义 Dockerfile 构建过程中的参数,可用于动态化构建。
-
语法:
ARG <参数名>[=<默认值>] -
示例:
- 定义默认值:
ARG VERSION=1.0 RUN echo $VERSION - 构建镜像时通过
--build-arg修改值:docker build -t --build-arg VERSION=2.0 my_images:1.0 .
- 定义默认值:
SHELL: 自定义容器中的 shell
SHELL 用于指定构建过程中运行指令的 shell,默认情况下使用 /bin/sh -c。
细节和用法说明
-
功能:
- 更改默认的 shell。例如,使用 PowerShell 而非
/bin/sh。
- 更改默认的 shell。例如,使用 PowerShell 而非
-
语法:
SHELL ["executable", "参数1", "参数2", ...] -
示例:
-
更改为 Bash:
SHELL ["/bin/bash", "-c"] -
使用 Windows PowerShell:
SHELL ["powershell", "-command"]
-
STOPSIGNAL: 自定义容器停止信号
STOPSIGNAL 用于指定容器在停止时 Docker 向其发送的信号。
细节和用法说明
-
功能:
- 定义停止容器时应发送的信号(默认是 SIGTERM)。
- 可用信号参考:Linux Signals。
-
语法:
STOPSIGNAL <信号值> -
示例:
-
设置为 SIGKILL:
STOPSIGNAL SIGKILL -
设置为自定义信号:
STOPSIGNAL 9
-
HEALTHCHECK: 容器健康检查
HEALTHCHECK 指令用于定义容器内某个服务或应用的健康检查机制,确保容器的状态可以被 Docker 监控。当容器运行时,Docker 会根据 HEALTHCHECK 的结果判断容器的健康状态,并标记为 healthy(健康)、unhealthy(不健康)、或 starting(检查未完成)。
细节和用法说明
-
功能:
- 定义容器运行时的健康检查逻辑,例如通过 HTTP 请求或执行命令的结果判断服务状态。
- 健康检查会影响容器的状态,当服务出现异常时,容器的状态会变为
unhealthy。
-
语法:
# 配置健康检查 HEALTHCHECK [选项] CMD <命令> # 禁用健康检查 HEALTHCHECK NONE- 选项:
--interval=<时间>:设置检查的时间间隔,默认为30s。--timeout=<时间>:设置检查命令的超时时间,默认为30s。--start-period=<时间>:设置健康检查开始前的宽限期,允许容器启动所需时间。--retries=<次数>:设置健康检查重试次数,默认为3。
- 选项:
-
命令返回规则:
- 返回值为
0:健康(healthy)。 - 返回值为非
0:不健康(unhealthy)。 - 超时或未响应:不健康(
unhealthy)。
- 返回值为
-
示例:
-
使用
curl检查 HTTP 服务是否正常:HEALTHCHECK --interval=5m --timeout=3s --start-period=30s --retries=3 \CMD curl -f http://localhost:8080/ || exit 1- 每隔 5 分钟检查一次容器内的 HTTP 服务(超时为 3 秒,启动宽限期 30 秒,重试 3 次)。
- 如果服务未响应或返回错误状态码(非 2xx),容器会被标记为
unhealthy。
-
检查 MySQL 服务是否就绪:
HEALTHCHECK CMD mysqladmin ping -h localhost || exit 1 -
禁用健康检查:
HEALTHCHECK NONE
-
构建镜像
- docker commit 方式
必须基于现有的容器进行修改, 然后提交为新的镜像
# 基础结构
docker commit [OPTIONS] CONTAINER [REPOSITORY[:TAG]]# OPTIONS 说明
## -a : 在commit时的作者
## -c : 使用dockerfile指令创建镜像
## -m : 在commit时的说明文字
## -p : 在commit时暂停容器运行
# 如:
docker commit -m "提交的描述信息" -a "作者" 容器id/容器名 镜像名:标签# 首先, 启动一个容器
docker run --rm -d -p 3001:80 --name nginx_commit nginx# 进入容器内部, 修改容器内容
docker exec -it nginx_commit /bin/bash
## 修改nginx的默认首页内容
echo "hello, nginx commit" > /usr/share/nginx/html/index.html# 提交修改后的容器为新的镜像
docker commit -m "simple test docker commit" -a "wolfcode" nginx_commit mynginx_commit:1.0# 查看镜像
docker images# 启动新的镜像
docker run --rm -d -p 3002:80 mynginx_commit:1.0
## 访问 http://localhost:3002/ 可以看到修改后的内容
- docker build 方式
# 基础结构
docker build -t [OPTIONS] 镜像名:标签 Dockerfile路径/.
# 常用的 OPTIONS 说明
## --build-arg=[] : 设置镜像创建时的变量# 如:
docker build -t mynginx:1.0 .# 查看镜像
docker images
示例1:
# 首先加入当前镜像的基础镜像
FROM python:3.10WORKDIR /appCOPY ./requirements.txt .
COPY ./simple_fastapi.py .RUN pip3 install -r requirements.txtEXPOSE 8040CMD ["python","simple_fastapi.py"]
构建镜像:
docker build -t myfastapi:1.0 .
构建自己的docker仓库Registry
阿里云容器镜像服务个人仓库
- 阿里云容器镜像服务
- 阿里云容器镜像服务帮助文档
可以自己先创建一个命名空间与镜像仓库, 阿里云会自动给出 login pull push 的方法

使用 Nexus 镜像仓库
# 创建一个 nexus 持久化目录
mkdir -p ~/docker_test/nexus
# 开放权限, 防止docker内的用户没有操作权限
chmod 777 ~/docker_test/nexus# 启动 nexus 的容器
docker run -d --restart=always -p 3005:8081 \-p 3006:5000 \-p 3007:5001 --name nexus -v ~/docker_test/nexus:/nexus-data \-e http_proxy=http://10.0.xx.xx:7892 \-e https_proxy=http://10.0.xx.xx:7892 \sonatype/nexus3# 访问 http://localhost:3005/ 可以看到 nexus 的界面
# pull/push
# 待更...
使用 Harbor 镜像仓库
使用harbor必须要先安装 docker 与 docker-compose
待更…
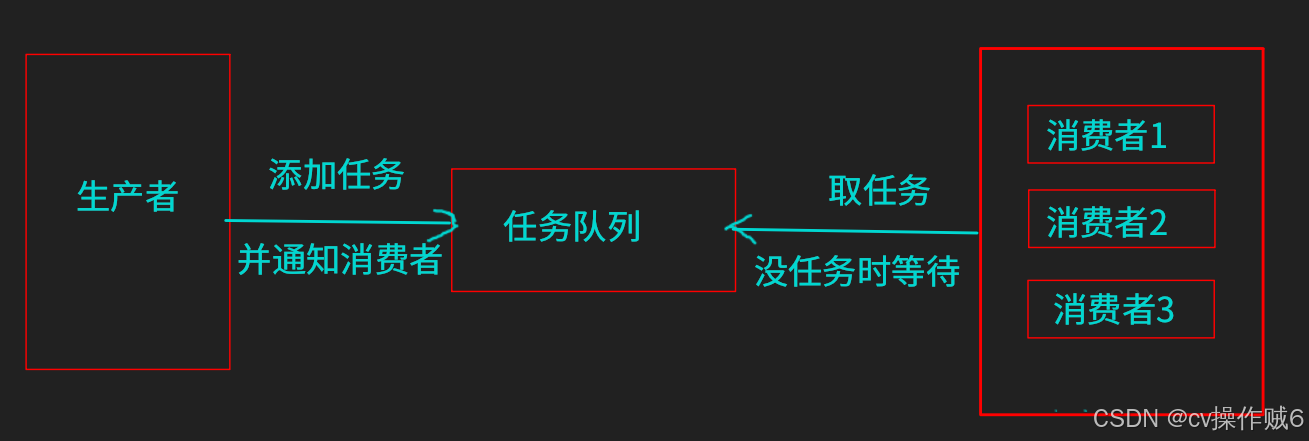
Docker Compose
容器编排: 管理多个容器的生命周期, 并保证它们之间的依赖关系
副本数控制: 容器有时候需要启动多个副本集群, 保证高可用, 快速对容器集群进行弹性伸缩
配置共享: 容器集群中, 需要共享一些配置文件, 如数据库配置, redis配置等

官方文档: docker-compose 官方文档
Services 相关
见官方文档
Networks 相关
见官方文档
Volumes 相关
见官方文档
Build 相关
docker-compose 可以利用 docker-compose.yml 文件中的 build 字段来构建镜像(代替 docker build -t 命令), 构建镜像的上下文默认为 docker-compose.yml 文件所在的目录
详情见上文compose官方文档
services:service_1:image: example/webappbuild: ./webapp# 常用的方式# build上下文为当前目录下的backend目录, Dockerfile为backend目录下的Dockerfileservice_2:image: example/databasebuild:context: ./backendservice_3:image: example/databasebuild:context: ./backenddockerfile: ../backend.Dockerfileservice_4:build: ~/custom
使用 docker-compose 的示例
首先写一个 docker-compose.yml 文件
services:# 定义一个服务service_1:# 定义镜像名image: "nginx"# # 定义容器名# container_name: "nginx_compose"# 定义端口映射ports:- "3010-3020:80"# 定义网络networks:- wolfcode_net# 定义环境变量environment:- ENV_VAR_1=VALUE_1- ENV_VAR_2=VALUE_2# # 定义依赖# depends_on:# - service_2# 定义重启策略restart: "always"# 定义挂载目录volumes:- type: volumesource: nginx_compose_testtarget: /usr/share/nginx/htmlnetworks:# 自动创建一个网络 wolfcode_net wolfcode_net:name: wolfcode_netdriver: bridgeipam:driver: defaultconfig:- subnet: 192.188.0.0/16gateway: 192.188.0.1volumes:nginx_compose_test:name: nginx_compose_test
使用 docker-compose config 验证配置文件格式是否正确
docker-compose 命令通常有一个前提, 就是执行命令时, 当前目录必须在 docker-compose.yml 文件的目录下
docker-compose config
使用 docker-compose up 启动服务
docker-compose 命令通常有一个前提, 就是执行命令时, 当前目录必须在 docker-compose.yml 文件的目录下
更多命令见: docker-compose 命令 CLI
# 启动与创建服务
# 当修改了docker-compose.yml的配置, docker-compose up -d 也可以用于更新服务
docker-compose up -d
## 仅仅创建服务, 不启动
docker-compose create # 根据当前目录下的 docker-compose.yml 文件创建所有的服务, 但是不启动
### 注意: create 后跟的是服务名, 而不是容器名, 下面的命令同理
docker-compose create 服务名 # 根据当前目录下的 docker-compose.yml 文件创建指定的服务, 但是不启动# 查看服务状态
docker-compose ps
docker-compose ps -a
docker-compose images
docker-compose ls# 停止服务
docker-compose stop # 停止服务, 但是不删除容器
docker-compose stop 服务名 # 停止指定的服务, 但是不删除容器# 启动服务
docker-compose start # 启动服务
docker-compose start 服务名 # 启动指定的服务# 删除服务
docker-compose down --help
docker-compose down # 删除所有服务 容器 网络, 但是不删除挂载的目录
docker-compose down -v # 删除所有服务 容器 网络, 同时删除挂载的目录
docker-compose down 服务名 # 删除指定的服务, 但是不删除挂载的目录
使用docker-compose 完成弹性伸缩
# 注意: scale 后跟的是服务名, 而不是容器名
# 该命令会自动停止现有的服务, 并启动新的服务
docker-compose up -d --scale 服务名=副本数docker-compose up -d --scale service_1=3
docker-compose up -d --scale service_1=2
docker-compose up -d --scale service_1=5
使用 docker-compose logs 查看日志
# 查看服务日志
docker-compose logs
docker-compose logs -f
docker-compose logs -f 服务名
Docker Swarm

在 Docker Swarm 集群中,不同节点需要通过内部的网络协议进行通信,以实现集群管理、服务分发以及任务调度等功能。为了确保通信正常,您需要开放一系列特定的端口。这些端口包括 Swarm 自身的管理、集群节点间的网络通信,以及应用服务所需要暴露的端口。
| 端口 | 原因/必要性 |
|---|---|
| 2377/TCP | 用于 Swarm 集群管理(加入或离开节点)。 |
| 7946/TCP | 用于 Manager 节点间的状态同步和心跳。 |
| 7946/UDP | 用于服务调度的 Gossip Protocol(群组通信协议)。 |
| 4789/UDP | 支持 Overlay 网络,确保服务(例如容器之间)在不同节点上的网络通信。 |
| 服务端口 | Manager 节点上运行的服务所需要暴露的端口(如 3000:80、80:80 等,由具体服务配置决定)。 |
端口开启后, 需要重启 docker 服务才能生效: sudo systemctl restart docker
swarm 基本概念
首先,Docker Swarm 是什么?
Docker Swarm 是一个用于管理和编排 Docker 容器的集群工具,它允许我们在多个主机上运行容器,就像运行在一台机器上的容器一样简单,并集成了基本的负载均衡功能。
-
swarm : 集群的管理和编排
docker swarm --help -
node : 集群中的docker 节点, 类似于 k8s 的 node 节点, 分为 manager 和 worker
-
service : 服务(Services) 是指的是一组任务的集合, 服务定义了任务的属性. 服务有两种模式:
- replicated services : 基于指定副本数量进行任务调度
- global services : 每个节点都运行一个任务
两种模式通过docker service create 的 --mode 参数指定

-
task : Task 是 Swarm 中的最小的调度单位, 目前来说就是一个单一的容器, 类似于 k8s 的 pod 中的容器
集群搭建
准备3台云服务器用于测试, 一个manager, 两个worker node, 3台服务器都安装了 docker, 并开启了上文中的端口
- 初始化集群
docker swarm --help# 初始化集群, 并将当前节点设置为 manager 节点
docker swarm init --advertise-addr <MANAGER-IP> # <MANAGER-IP> 是当前节点的 IP 地址
# 如:
docker swarm init --advertise-addr 119.3.xxx.xxx# 运行完成后, 会返回一个 node token 命令, 用于 worker 节点加入集群
# 格式大概为:
# docker swarm join --token SWMTKN-1-5jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7jz0q4z7j 119.3.xxx.xxx:2377# 在另外两个 worker 节点上运行该命令即可加入集群
# 获得worker节点加入集群的token(管理节点运行命令)
docker swarm join-token worker
# 获得manager节点加入集群的token(管理节点运行命令)
docker swarm join-token manager
Warning: 不同的云服务器商私网ip(网卡eth0)之间是无法通信的, docker swarm 默认可能会把私网ip加入到 ingress网络中, 即使worker节点可以正常加入到swarm, 管理节点也可能无法发送信息到worker节点的私网ip, 造成ingress自动负载转发异常, 解决方式如下:
# docker swarm join 加入新参数 --advertise-addr 工作节点的公网ip 即可解决
docker swarm join --token xxxxxxxxxxxxxxxxxx --advertise-addr <WORKER-公网IP> <MANAGER-IP>:2377# 查看是否成功
## 工作节点:
docker info
### 内部有swarm 的信息## 查看 docker ingress 网络的配置(管理节点运行)
docker network inspect ingress
### 里面 的"Peers": 内部的信息是否正确## 查看 docker ingress 网络的配置(工作节点运行)
docker network inspect ingress
### 里面 的"Peers": 内部的信息是否正确
- 查看集群状态(管理节点运行)
docker node --help
docker node ls
docker node ps
docker node inspect <NODE-ID> # <NODE-ID> 是节点的 ID
部署服务
- 创建并启动服务
docker service --help
docker service create --help# 创建并启动服务
# 默认启用 Ingress 网络, 显式告诉 Swarm 将单独的 3000 端口暴露给集群范围, 启用 Ingress 网络,实现请求的集群范围转发。
docker service create --replicas 2 --publish 3000:80 --name nginx_swarm nginx
docker service create --replicas 2 -p 3000:80 --name nginx_swarm nginxdocker service create --replicas 2 -p 3000-3005:80 --name nginx_swarm nginx
1. Docker Swarm 的 --publish 及负载均衡机制
1.1 --publish 如何实现负载均衡?
Docker Swarm 的 --publish 参数用于将服务的容器端口暴露给外界访问,并通过 Swarm 内部的负载均衡器实现流量的自动分发。
步骤讲解:
-
创建服务并暴露端口:
- 我们通过
docker service create创建一个服务,例如运行一个nginx服务并暴露端口:docker service create --name my_service --replicas 5 --publish 8080:80 nginx--name my_service:给服务命名。--replicas 5:运行 5 个副本(即 5 个容器)。--publish 8080:80:对外暴露端口 8080,将其映射到容器内的 80 端口(nginx默认使用 80 端口)。
- 我们通过
-
服务的分布与负载:
- Swarm 会根据集群中的可用节点,把 5 个副本均匀分布到节点上(除非有节点资源不足等情况)。
- 假设有 3 台节点,服务可能会分布如下:
node-1:运行 2 个副本。node-2:运行 2 个副本。node-3:运行 1 个副本。
-
外部流量的进入:
- 外部用户通过访问集群中任意节点的 IP 和暴露的 8080 端口访问这个服务:
http://<任意节点的IP>:8080 - Docker Swarm 的负载均衡机制会将请求根据简单的轮询策略分发到服务的 5 个副本中。
- 外部用户通过访问集群中任意节点的 IP 和暴露的 8080 端口访问这个服务:
-
Ingress 网络:
- Swarm 使用一个特殊的分布式网络,叫做 Ingress 网络,来管理流量。
- 即使请求进入了一个没有直接运行副本的节点,该节点也会通过 Ingress 网络将流量转发到运行任务副本的节点。例如:
流量进入了
node-2,而副本在node-1上运行,node-2会自动将流量转发到node-1。
特点:
- 简单而透明: Swarm 用户完全不需要关心副本的具体位置,也不需额外配置负载均衡器。
- 负载分配策略: Swarm 默认采用简单的 轮询(Round-Robin) 策略,将流量依次分配到服务的多个副本。
1.2 Swarm 的优缺点
-
优点:
- 极简风格:仅需
--publish一行命令,即可实现负载均衡。 - 易用性强,适合中小型应用场景。
- 内部的集群式端口暴露(Ingress 网络)隐藏了复杂性。
- 极简风格:仅需
-
缺点:
- Swarm 的负载均衡机制较为基础,只能基于简单的轮询分配流量。
- 无法根据副本的资源消耗(如 CPU、内存)做智能调度,不适合复杂场景。
2. Kubernetes 的负载均衡机制
Kubernetes(K8s)是 Docker Swarm 的强大竞争对手,它是现代化云原生架构中的核心工具。相比 Swarm,K8s 提供了更加复杂、灵活的负载均衡机制。
2.1 Kubernetes 的负载均衡方法
在 K8s 中,负载均衡分为多个层次:
-
内部流量负载均衡:
- K8s 提供了一种叫做
ClusterIP的 “虚拟 IP” 机制,用来在服务(Service)和 Pod(容器)之间实现流量的分发。 - Service 会根据 Pod 的实际状态(健康检查的结果)动态分发流量到健康 Pod。
- K8s 提供了一种叫做
-
外部流量负载均衡:
- 在 Kubernetes 中,外部流量通常通过
NodePort或LoadBalancer类型的服务进入集群。- NodePort: 将一个节点的某个端口暴露给外界,用于接收流量。
- LoadBalancer: 使用云供应商的负载均衡器(如 AWS、GCP 的 Load Balancer)分发流量到集群节点。
- 在 Kubernetes 中,外部流量通常通过
-
高级应用:Ingress Controller
- K8s 支持使用 Ingress(基于 L7 网络协议的负载均衡)管理 HTTP 请求,通过域名、URL 路径等规则分发流量到不同服务。
2.2 Kubernetes 的优点
- 支持多层次负载均衡,从内部 IP 转发到外部代理(如 Nginx Ingress)。
- 可以扩展自定义流量转发规则,例如基于 HTTP Header 的分发。
- 能力远超 Swarm,但复杂度也更高。
- 查看集群服务状态(管理节点运行)
docker service --help
docker service lsdocker service inspect <SERVICE-ID> # <SERVICE-ID> 是服务的 ID
docker service inspect --pretty <SERVICE-ID> # <SERVICE-ID> 是服务的 ID
# --pretty 参数可以简化展示服务信息docker service logs -f <SERVICE-ID> # <SERVICE-ID> 是服务的 IDdocker service ps <SERVICE-ID> # <SERVICE-ID> 是服务的 ID# 删除服务
docker service rm <SERVICE-ID> # <SERVICE-ID> 是服务的 ID
## 验证 docker service ls# 判断某一个节点是否在集群中
## 1. 管理节点运行
docker node ls
docker node inspect <NODE-ID> # <NODE-ID> 是节点的 ID## 2. 任何节点都可以通过以下命令查看
docker info # 看看里面是否有swarm 相关的信息弹性伸缩
1. 服务更新(调整实例的个数)
# 调整服务的副本数量
docker service update --replicas 5 <SERVICE-ID/NAME> # <SERVICE-ID> 是服务的 ID
2. 调整集群的规模
# 离开swarm
## 各个节点运行
docker swarm leave --force# 加入swarm
## 获得worker节点加入集群的token(管理节点运行命令)
### docker swarm join-token worker
## 获得manager节点加入集群的token(管理节点运行命令)
### docker swarm join-token manager# 注意: --advertise-addr <WORKER-公网IP> 可以看情况加入, 原因正如上文所讲, 保证worker节点能够被manager节点找到
docker swarm join --token SWMTKN-1-4q1j0p9w6w3z9xv2v6z1q6w3z9xv2v6z1q6w3z-3j3z9xv2v6z1q6w3z9xv2v6z1q6w3z --advertise-addr <WORKER-公网IP> <MANAGER-IP>:<MANAGER-PORT>
Docker Machine
待更.