一、前言
随着科技的不断发展,在许多领域中,对气压与海拔高度的测量变得越来越重要。例如,对于航空和航天工业、气象预报、气候研究等领域,都需要高精度、可靠的气压与海拔高度检测装置。针对这一需求,基于单片机设计的气压与海拔高度检测计应运而生。
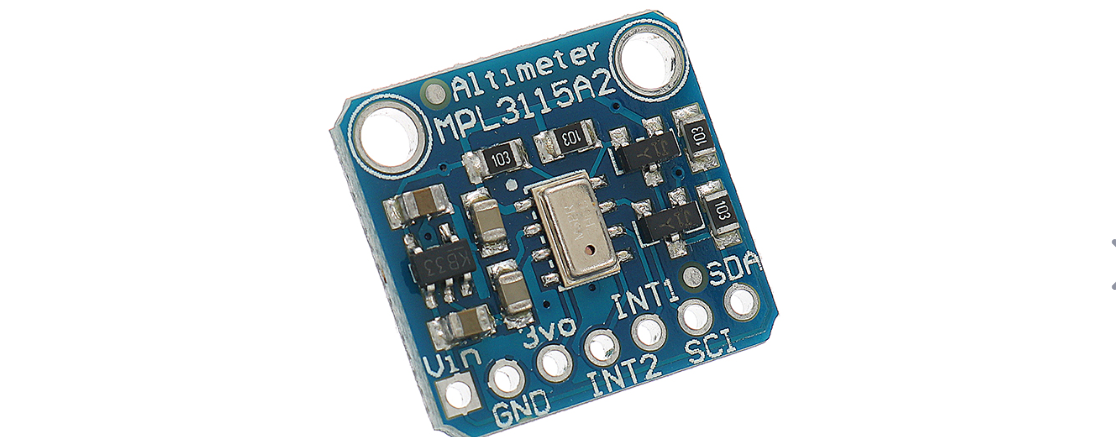
本项目采用了MPL3115A2芯片作为气压与温度传感器,能够实现高精度、高分辨率的气压与海拔高度测量。主控芯片采用STC89C52,具有强大的控制能力和丰富的资源,能够更好地满足系统设计的要求。此外,通过LCD1602显示检测到的信息,可以使用户更加方便地查看和使用系统。
二、项目设计思路
在设计此项目时,需要考虑硬件设计和软件设计两个方面。
2.1 硬件设计思路
(1)主控芯片:选择STC89C52作为主控芯片,它具有51系列单片机的特点,拥有强大的处理能力和丰富的资源,可以满足系统的需求。
(2)传感器选择:采用MPL3115A2芯片作为气压与温度传感器,它具有高精度、高分辨率的特点,并且支持I2C通信协议,方便与主控芯片进行数据交互。
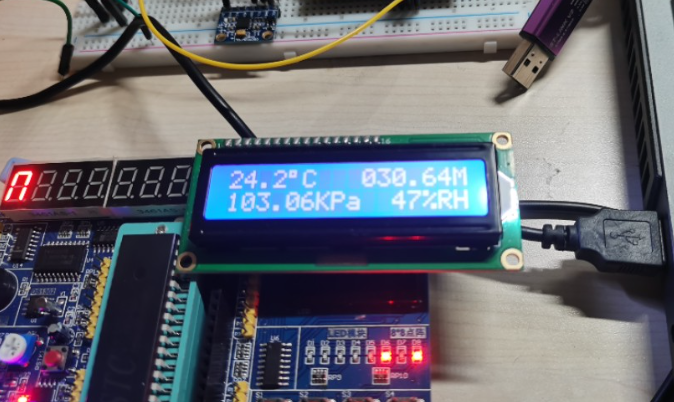
(3)显示模块:选择LCD1602作为显示模块,它可以显示检测到的信息,如气压和海拔高度,让用户直观地了解测量结果。
(4)连接方式:根据MPL3115A2芯片规格书和STC89C52芯片手册,确定它们之间的连接方式,通常使用I2C总线进行通信。
2.2 软件设计思路
(1)初始化:在程序开始时,需要对主控芯片和传感器进行初始化设置,包括引脚配置、寄存器初始化等。
(2)数据采集:通过I2C通信协议,主控芯片向传感器发送指令,读取气压和温度数据。然后对数据进行处理,得到实际的气压值和海拔高度值。
(3)数据显示:将测量到的气压和海拔高度值通过LCD1602显示出来,可以使用LCD1602的相关库函数来实现。
(4)循环检测:为了持续监测气压和海拔高度的变化,可以使用一个循环,在每次循环中执行数据采集和显示操作。
三、项目代码实现
#include <reg52.h>
#include <intrins.h>#define MPL3115A2_ADDRESS (0xC0>>1) // MPL3115A2 I2C地址
#define MPL3115A2_CTRL_REG1 (0x26) // 控制寄存器1地址
#define MPL3115A2_PT_DATA_CFG (0x13) // 气压和温度数据寄存器地址
#define MPL3115A2_STATUS (0x00) // 状态寄存器地址
#define MPL3115A2_OUT_P_MSB (0x01) // 气压输出数据MSB字节地址
#define MPL3115A2_OUT_P_CSB (0x02) // 气压输出数据CSB字节地址
#define MPL3115A2_OUT_P_LSB (0x03) // 气压输出数据LSB字节地址
#define MPL3115A2_OUT_T_MSB (0x04) // 温度输出数据MSB字节地址
#define MPL3115A2_OUT_T_LSB (0x05) //温度输出数据LSB字节地址#define LCD1602_DATA_PORT P1 // LCD1602数据口
sbit LCD1602_RS = P3^1; //LCD1602命令/数据选择引脚
sbit LCD1602_RW = P3^2; //LCD1602读写选择引脚
sbit LCD1602_E = P3^3; //LCD1602使能引脚//延时函数
void Delay1ms(void)
{unsigned char i, j;_nop_();i = 12;j = 169;do{while (--j);} while (--i);
}//写一个字节到LCD1602
void LCD1602_WriteByte(unsigned char byte, bit isData)
{LCD1602_E = 0;LCD1602_RS = isData;LCD1602_RW = 0;LCD1602_DATA_PORT = byte;Delay1ms();LCD1602_E = 1;Delay1ms();LCD1602_E = 0;
}//初始化LCD1602
void LCD1602_Init(void)
{LCD1602_WriteByte(0x38, 0); // 设置数据总线为8位,显示模式为2行,5*7点阵字符LCD1602_WriteByte(0x0c, 0); // 开启LCD显示,关闭光标显示和闪烁LCD1602_WriteByte(0x06, 0); // 输入方式设置(光标移动方向向右,字符不移动)LCD1602_WriteByte(0x01, 0); // 清屏
}//LCD1602显示字符串
void LCD1602_ShowString(unsigned char x, unsigned char y, unsigned char *str)
{unsigned char i = 0;if (y == 1) x |= 0x40; //设置显示行位置为第二行x |= 0x80; //设置显示行位置LCD1602_WriteByte(x, 0);while (str[i] != '\0'){LCD1602_WriteByte(str[i], 1);i++;}
}//I2C通信函数
unsigned char I2C_SendByte(unsigned char dat)
{unsigned char bit_ctr,ack;for(bit_ctr=0;bit_ctr<8;bit_ctr++) //循环8次,发送8位数据{SDA = (bit_ctr & 0x80); // 判断当前位是0还是1,设置SDA引脚_nop_();SCL = 1; // 拉高SCL引脚,发送数据_nop_();SCL = 0; // 拉低SCL引脚}SDA = 1; // 在最后一次时,SDA引脚设置为1,等待ACK确认_nop_(); SCL = 1; // 拉高SCL引脚ack = SDA; // 读取ACK确认信号_nop_();SCL = 0; // 拉低SCL引脚,结束发送return ack;
}//I2C通信函数
unsigned char I2C_ReadByte(void)
{unsigned char bit_ctr, dat = 0;for(bit_ctr=0;bit_ctr<8;bit_ctr++) //循环8次,接收8位数据{SDA = 1; // 让SDA引脚保持为1,准备接收数据_nop_();SCL = 1; // 拉高SCL引脚,让数据线上的数据进入芯片_nop_();dat |= SDA; // 将当前接收到的数据bit复制到dat的对应bit上if(bit_ctr != 7) dat <<= 1; // 如果不是最后一位,就将dat左移一位,以接收下一个bitSCL = 0; // 拉低SCL引脚,等待下一次数据输入}return dat;
}//写字节到MPL3115A2芯片
void MPL3115A2_WriteByte(unsigned char regAddr, unsigned char data)
{I2C_Start(); // 启动I2C总线I2C_SendByte(MPL3115A2_ADDRESS); // 发送I2C设备地址+写标志I2C_SendByte(regAddr); // 发送要写入的寄存器地址I2C_SendByte(data); // 发送要写入的数I2C_Stop(); // 结束I2C通信
}//读取MPL3115A2芯片的一个字节
unsigned char MPL3115A2_ReadByte(unsigned char regAddr)
{unsigned char data;I2C_Start(); // 启动I2C总线I2C_SendByte(MPL3115A2_ADDRESS); // 发送I2C设备地址+写标志I2C_SendByte(regAddr); // 发送要读取的寄存器地址I2C_Start(); // 启动I2C总线I2C_SendByte(MPL3115A2_ADDRESS+1); // 发送I2C设备地址+读标志data = I2C_ReadByte(); // 读取一个字节I2C_Stop(); // 结束I2C通信return data;
}//启动一次MPL3115A2芯片的气压测量
void MPL3115A2_PressureMeasureStart(void)
{MPL3115A2_WriteByte(MPL3115A2_CTRL_REG1, 0x38); // 向控制寄存器1写入设置值,启动气压测量
}//等待MPL3115A2芯片气压测量结束
void MPL3115A2_WaitForPressureMeasureFinish(void)
{unsigned char status;do{status = MPL3115A2_ReadByte(MPL3115A2_STATUS); // 读取状态寄存器} while ((status & 0x08) == 0); // 检查气压测量结束标志位
}//读取MPL3115A2芯片测量的气压值,单位Pa
long MPL3115A2_ReadPressure(void)
{unsigned char msb, csb, lsb;long press;msb = MPL3115A2_ReadByte(MPL3115A2_OUT_P_MSB); // 读取气压数据的MSB字节csb = MPL3115A2_ReadByte(MPL3115A2_OUT_P_CSB); // 读取气压数据的CSB字节lsb = MPL3115A2_ReadByte(MPL3115A2_OUT_P_LSB); // 读取气压数据的LSB字节press = (msb << 16) | (csb << 8) | lsb; // 将读取到的三个字节组合成一个长整型数值press >>= 4; // 由于最后四位是不需要的,因此右移四位return press;
}//读取MPL3115A2芯片测量的温度值,单位0.0625°C
int MPL3115A2_ReadTemperature(void)
{unsigned char msb, lsb;int temp;msb = MPL3115A2_ReadByte(MPL3115A2_OUT_T_MSB); // 读取温度数据的MSB字节lsb = MPL3115A2_ReadByte(MPL3115A2_OUT_T_LSB); // 读取温度数据的LSB字节temp = (msb << 8) | lsb; // 将读取到的两个字节组合成一个整型数值return temp >> 4; // 由于最后四位是不需要的,因此右移四位
}//将气压值转换成海拔高度值(单位:米)
float ConvertPressureToAltitude(long press)
{float altitude;altitude = 44330 * (1 - pow((press / 101325.0), 0.1903)); // 根据公式计算海拔高度return altitude;
}void main()
{unsigned char str[16];long press;float altitude;int temperature;I2C_Init(); // 初始化I2C总线LCD1602_Init(); // 初始化LCD1602MPL3115A2_PressureMeasureStart(); // 启动一次气压测量MPL3115A2_WaitForPressureMeasureFinish(); // 等待气压测量结束press = MPL3115A2_ReadPressure(); // 读取气压值altitude = ConvertPressureToAltitude(press); // 将气压值转换成海拔高度值temperature = MPL3115A2_ReadTemperature(); // 读取温度值sprintf(str, "Press: %dPa", press); // 将气压值转换成字符串LCD1602_ShowString(0, 0, str); // 在第一行LCD1602上显示气压值sprintf(str, "Altitude: %dm", (int)altitude); // 将海拔高度值转换成字符串LCD1602_ShowString(0, 1, str); // 在第二行LCD1602上显示海拔高度值sprintf(str, "Temp: %dC", temperature); // 将温度值转换成字符串LCD1602_ShowString(11, 0, str); // 在第一行LCD1602上显示温度值while (1); // 等待
}四、MPL3115A2模块介绍
MPL3115A2 是一款集成式数字大气压力传感器模块,由NXP Semiconductors(前身为Freescale Semiconductor)生产。通过测量大气压力和温度,提供了高精度的大气压力和海拔测量功能。
下面是 MPL3115A2 模块的一些主要特点和功能:
(1)大气压力测量:MPL3115A2 可以测量大气压力,并提供绝对压力、相对压力和海拔高度等数据。它支持广泛的压力测量范围,通常为 20 kPa 至 110 kPa。这使得它适用于气象监测、高度测量、天气预报和气压趋势分析等应用。
(2)温度测量:MPL3115A2 还具有温度测量功能,可以提供环境温度数据。这对于需要考虑温度变化对压力测量的影响的应用非常重要。
(3)高精度测量:MPL3115A2 提供高精度的压力和温度测量。它使用16位的ADC(模数转换器)进行测量,并提供高分辨率的数据输出。这使得它能够提供准确的大气压力和温度数据。
(4)数字输出接口:MPL3115A2 通过I2C接口与主控制器通信。这种数字接口使得与微控制器、单片机或其他数字设备的集成变得简单。
(5)低功耗:MPL3115A2 设计为低功耗模式,可以在不太耗电的情况下运行。它具有多种省电模式,可根据应用需求进行配置,以延长电池寿命。
(6)自动补偿和校准:MPL3115A2 模块具有自动温度补偿和校准功能,以提高测量的准确性和稳定性。它可以根据环境条件自动调整并校准传感器输出,以减少温度和其他因素对测量结果的影响。
(7)应用领域:由于 MPL3115A2 模块提供了高精度的大气压力和温度测量,它适用于许多应用领域。例如,它可以用于气象站、高度计、无人机和飞行器的高度控制、室内导航系统以及气压计算设备等。
MPL3115A2 是一款功能强大的集成式数字大气压力传感器模块,具有高精度测量、低功耗和数字接口等特点,适用于多种大气压力和海拔测量应用。
五、总结
本项目主要涉及到硬件和软件两个方面,利用MPL3115A2气压传感器模块和LCD1602液晶显示屏实现气压测量和海拔高度计算,并将测得的数据在LCD1602上进行显示。
具体实现过程如下:
(1)硬件方面,需要将MPL3115A2模块和LCD1602显示屏接入单片机,并进行相应的电路设计和连接。
(2)软件方面,需要使用8051单片机来控制MPL3115A2模块和LCD1602显示屏,包括初始化I2C总线、MPL3115A2芯片和LCD1602显示屏,启动气压测量并等待其完成,读取气压值和温度值,将气压值转换成海拔高度值,并通过LCD1602显示屏进行显示。
本项目在实际应用中可作为气压测量和海拔高度计算的一个基础模块,为相关领域的研究和应用提供了一定的技术支持。
![2023年中国聚氨酯树脂涂料需求量、市场规模及行业趋势分析[图]](https://img-blog.csdnimg.cn/img_convert/23b79af19c919003a219a25dd00619c9.png)







![数据结构~~~~ [队列] ~~~~](https://img-blog.csdnimg.cn/a9158d3f7445411abcba2cf40d796e38.png)