USB 摄像头模块测试及配置
- 一、首先将 USB 摄像头插入到 Orange Pi 开发板的 USB 接口中
- 二、然后通过 lsmod 命令可以看到内核自动加载了下面的模块
- 三、通过 v4l2-ctl 命令可以看到 USB 摄像头的设备节点信息为 /dev/video0
- 四、使用 fswebcam 测试 USB 摄像头
- 五、使用 motion 测试 USB 摄像头
- 六、使用 mjpg-streamer 测试 USB 摄像头
- 七、后续指令、脚本、开机自启
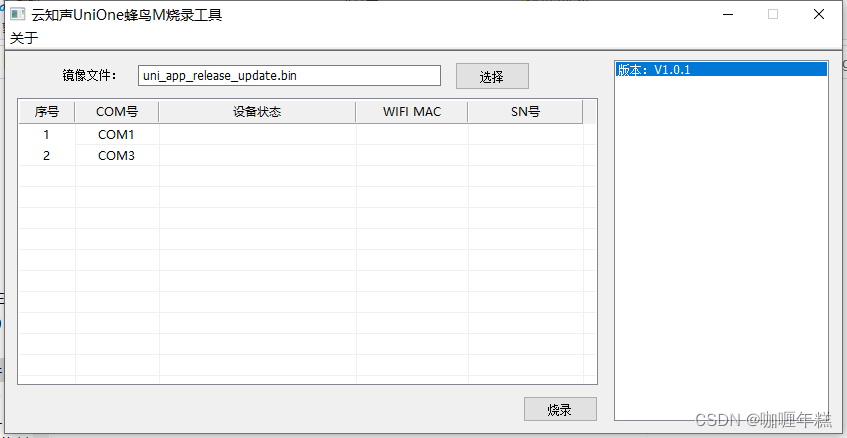
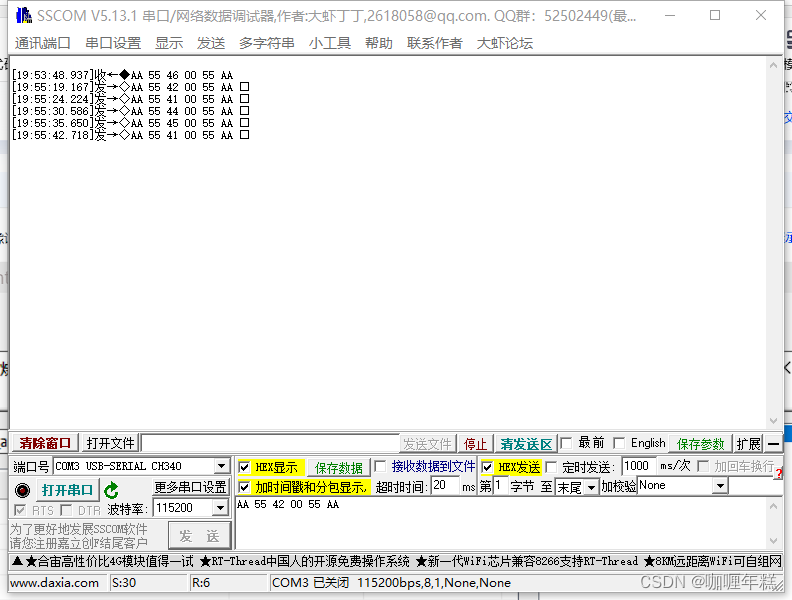
语音模块配置烧录及测试
USB 摄像头模块测试及配置
一、首先将 USB 摄像头插入到 Orange Pi 开发板的 USB 接口中
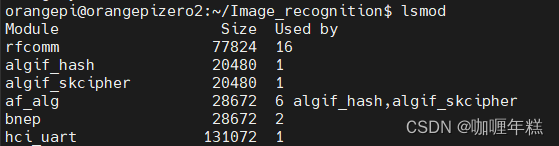
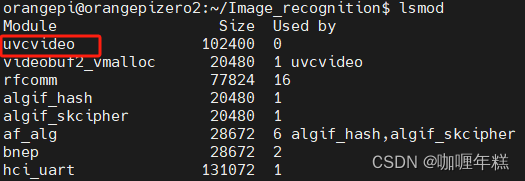
二、然后通过 lsmod 命令可以看到内核自动加载了下面的模块
lsmod 命令用于列出当前加载的内核模块。它会显示已加载模块的信息,包括模块的名称、大小、使用次数等。
orangepi@orangepi:~$ lsmod
Module Size Used by
uvcvideo 106496 0
如果你在终端上执行 lsmod 命令,它会输出当前加载的内核模块列表。
lsmod
示例输出可能如下:
Module Size Used by
nls_utf8 12557 1
isofs 39835 1
binfmt_misc 17213 1
snd_bcm2835 24427 0
snd_pcm 98501 1 snd_bcm2835
snd_timer 23968 1 snd_pcm
snd 70032 3 snd_bcm2835,snd_timer,snd_pcm
uio_pdrv_genirq 12958 0
uio 17843 1 uio_pdrv_genirq
fixed 12556 0
i2c_dev 12848 0
每一行表示一个加载的模块,其中包括模块的名称、大小、以及使用该模块的其他模块等信息。
请注意,lsmod 命令通常需要 root 权限才能执行,你可能需要使用 sudo lsmod。
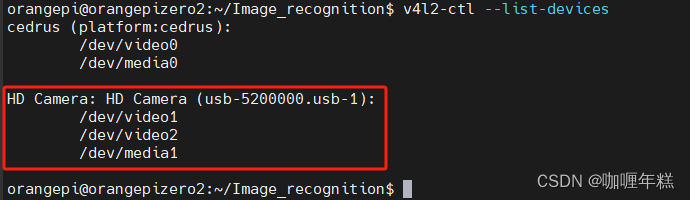
三、通过 v4l2-ctl 命令可以看到 USB 摄像头的设备节点信息为 /dev/video0
orangepi@orangepi:~$ sudo apt update
orangepi@orangepi:~$ sudo apt install -y v4l-utils
orangepi@orangepi:~$ v4l2-ctl --list-devices
USB 2.0 Camera (usb-sunxi-ehci-1):
/dev/video0
四、使用 fswebcam 测试 USB 摄像头
1. 安装 fswebcam
orangepi@orangepi:~$ sudo apt update
orangepi@orangepi:~$ sudo apt-get install -y fswebcam
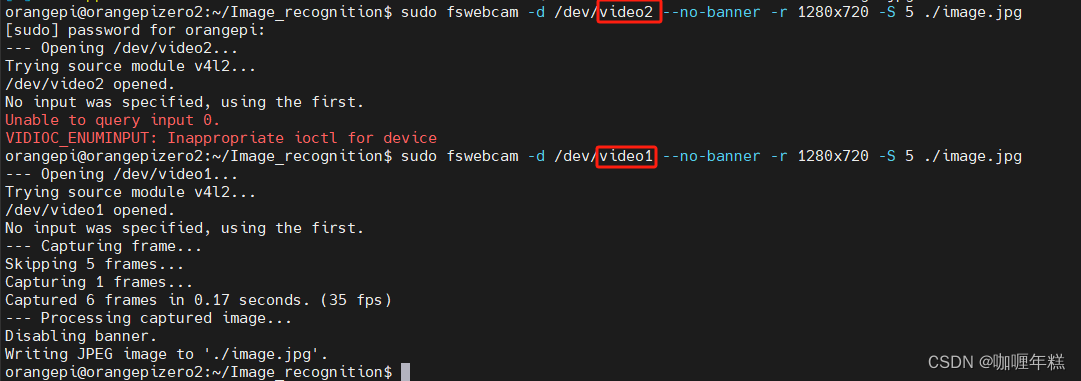
2. 安装完 fswebcam 后可以使用下面的命令来拍照
a) -d 选项用于指定 USB 摄像头的设备节点
b) --no-banner 用于去除照片的水印
c) -r 选项用于指定照片的分辨率
d) -S 选项用设置于跳过前面的帧数
e) ./image.jpg 用于设置生成的照片的名字和路径
orangepi@orangepi:~$ sudo fswebcam -d /dev/video0 --no-banner -r 1280x720 -S 5 ./image.jpg
3. 在服务器版的 linux 系统中,拍完照后可以使用 scp 命令将拍好的图片传到Ubuntu PC 上镜像观看
orangepi@orangepi:~$ scp image.jpg test@192.168.1.55:/home/test(根据实际情况修改 IP 地址和路径)

4. 在桌面版的 linux 系统中,可以通过 HDMI 显示器直接查看拍摄的图片
五、使用 motion 测试 USB 摄像头
1. 安装摄像头测试软件 motion
orangepi@orangepi:~$ sudo apt update
orangepi@orangepi:~$ sudo apt install -y motion
2. 修 改 /etc/default/motion 的 配 置 , 将 start_motion_daemon=no 修 改 为start_motion_daemon=yes
注意,Ubuntu22.04 不用设置这一步。
orangepi@orangepi:~$ sudo sed -i "s/start_motion_daemon=no/start_motion_daemon=yes/" /etc/default/motion
3. 修改/etc/motion/motion.conf 的配置
orangepi@orangepi:~$ sudo sed -i "s/stream_localhost on/stream_localhost off/" /etc/motion/motion.conf
4. 另外还需确保/etc/motion/motion.conf 的 videodevice 设置为了 USB 摄像头对应的设备节点
注意,video 的序号不一定都是 video0,请以实际看到的为准。
orangepi@orangepi:~$ sudo vim /etc/motion/motion.conf
# Video device (e.g. /dev/video0) to be used for capturing.
videodevice /dev/video0
5. 然后运行 motion
orangepi@orangepi:~$ sudo motion -b
6. 使用 motion 前请先确保 Orange Pi 开发板能正常连接网络,然后通过 ip addrshow 命令获取开发板的 IP 地址
7. 然后在和开发板同一局域网的 Ubuntu PC 或者 Windows PC 或者手机的火狐浏览器中输入【开发板的 IP 地址:8081】就能看到摄像头输出的视频了
六、使用 mjpg-streamer 测试 USB 摄像头
1. 下载 mjpg-streamer
a) Github 的下载地址:
orangepi@orangepi:~$ git clone https://github.com/jacksonliam/mjpg-streamer
b) Gitee 的镜像下载地址为:
orangepi@orangepi:~$ git clone https://gitee.com/leeboby/mjpg-streamer
2. 安装依赖的软件包
a) Ubuntu 系统
orangepi@orangepi:~$ sudo apt-get install -y cmake libjpeg8-dev
b) Debian 系统
orangepi@orangepi:~$ sudo apt-get install -y cmake libjpeg62-turbo-dev
3. 编译安装 mjpg-streamer
orangepi@orangepi:~$ cd mjpg-streamer/mjpg-streamer-experimental
orangepi@orangepi:~/mjpg-streamer/mjpg-streamer-experimental$ make -j4
orangepi@orangepi:~/mjpg-streamer/mjpg-streamer-experimental$ sudo make install
4. 然后输入下面的命令启动 mjpg_streamer
注意,video 的序号不一定都是 video0,请以实际看到的为准。
orangepi@orangepi:~/mjpg-streamer/mjpg-streamer-experimental$ export LD_LIBRARY_PATH=.
orangepi@orangepi:~/mjpg-streamer/mjpg-streamer-experimental$ sudo ./mjpg_streamer -i "./input_uvc.so -d /dev/video0 -u -f 30" -o "./output_http.so -w ./www"
这里可以根据里面自带shell脚本来配置

修改 start.sh脚本,将start.sh里的:
./mjpg_streamer -i "./input_uvc.so" -o "./output_http.so -w ./www"
字段修改为:
./mjpg_streamer -i "./input_uvc.so -d /dev/video1 -u -f 30" -o "./output_http.so -w ./www"
#注意这里的video1需要根据实际情况修改
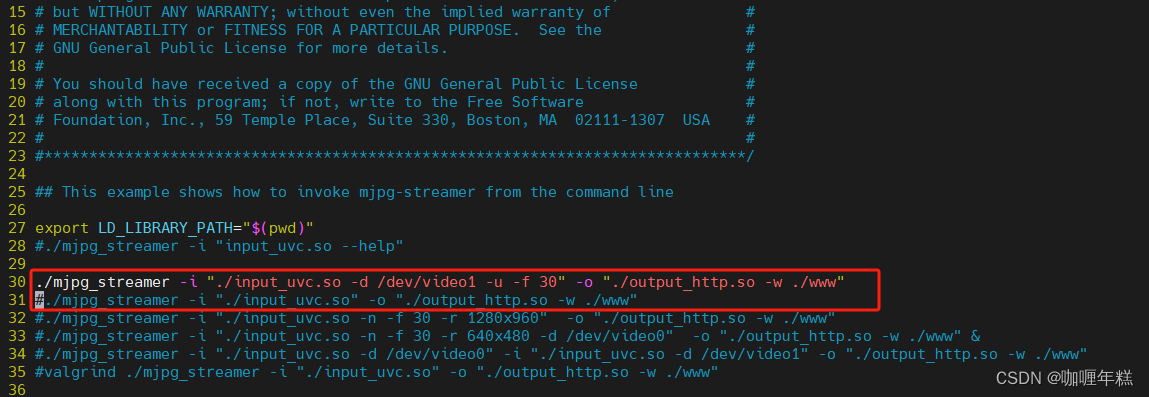
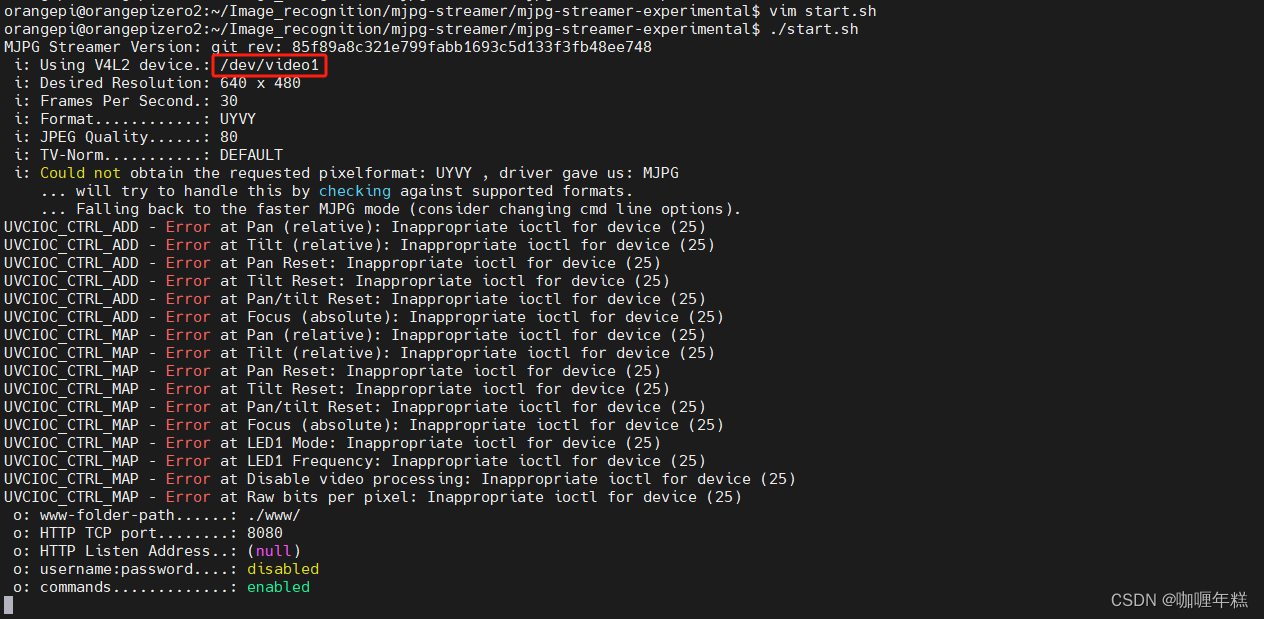
这样就可以通过执行./start.sh运行摄像头了。
5. 然后在和开发板同一局域网的 Ubuntu PC 或者 Windows PC 或者手机的浏览器中输入【开发板的 IP 地址:8080】就能看到摄像头输出的视频了
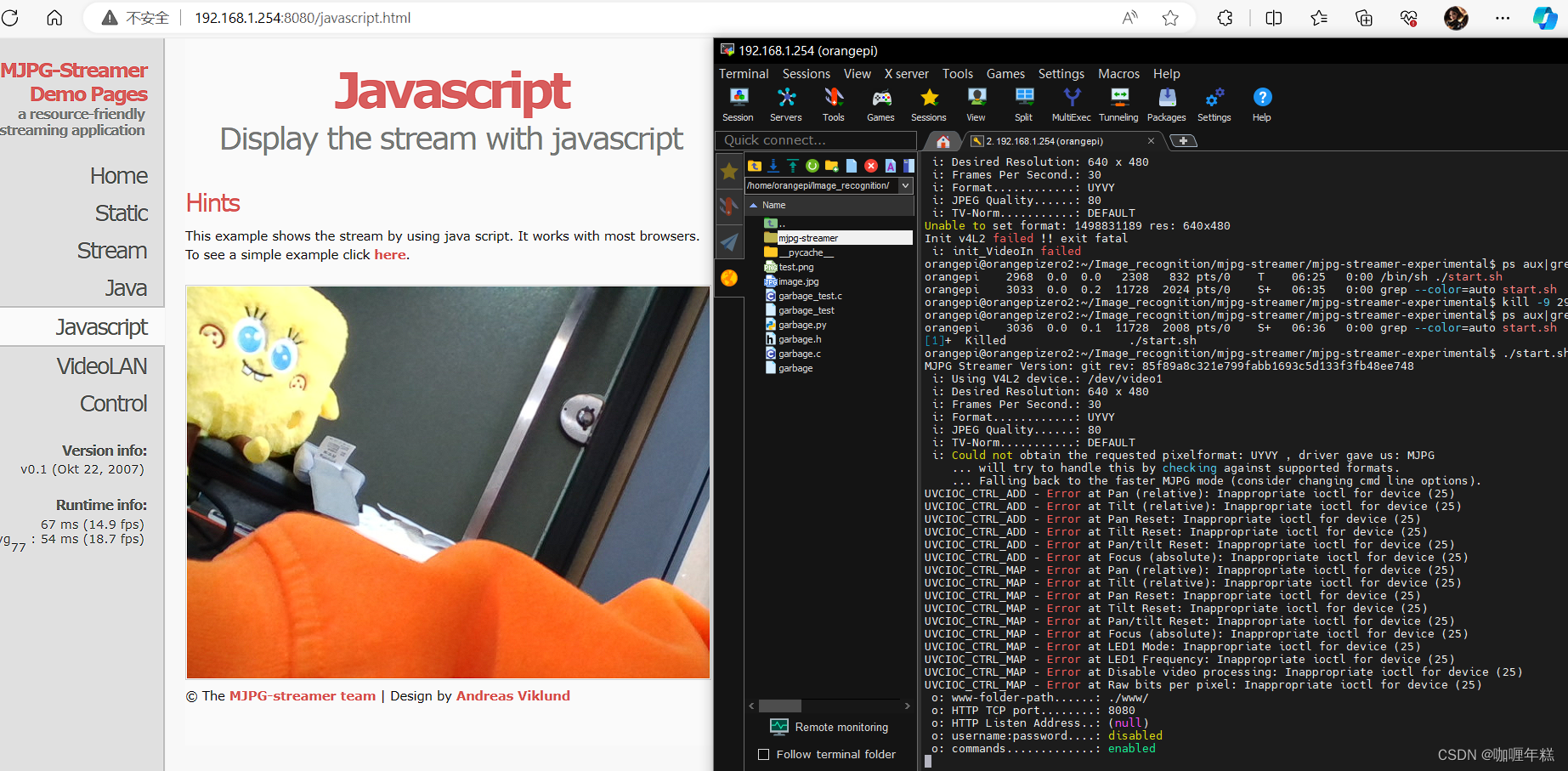
6. 推荐使用 mjpg-streamer 来测试 USB 摄像头,比 motion 流畅很多,使用mjpg-streamer 感觉不到任何卡顿
七、后续指令、脚本、开机自启
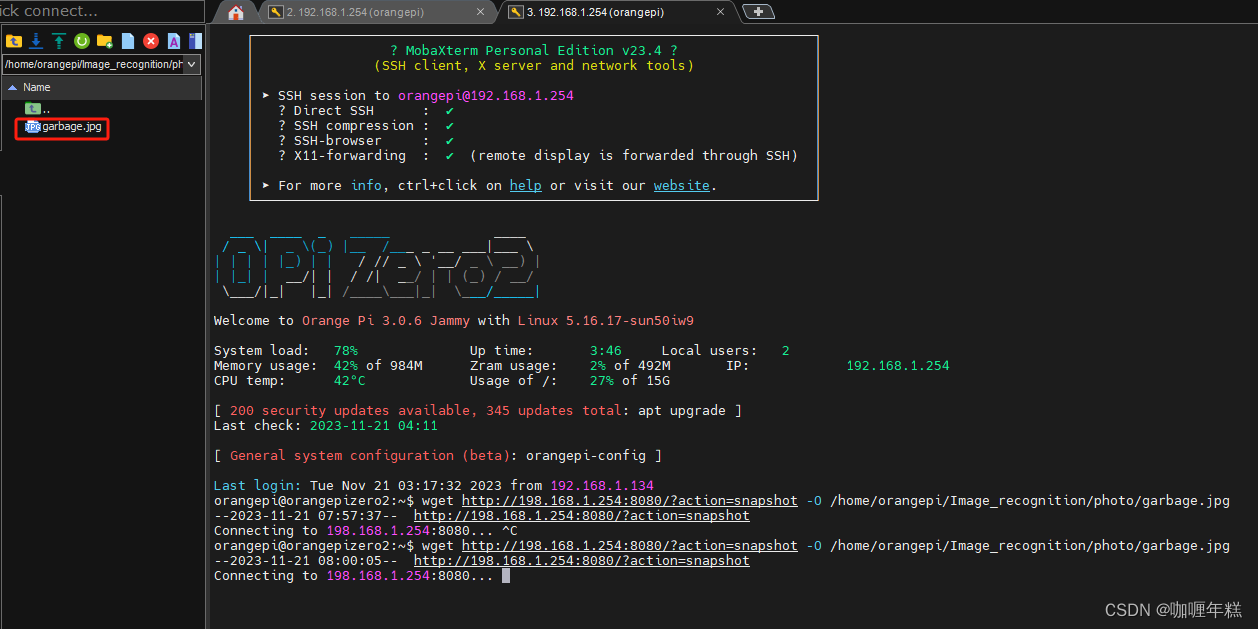
拍照指令
sudo fswebcam -d /dev/video0 --no-banner -r 1280x720 -S 5 ./image.jpg
wget http://192.168.1.254:8080/?action=snapshot -O /tmp/garbage.jpg
shell脚本garbage.sh
# !/bin/bashcd /home/orangepi/Image_recognition/mjpg-streamer/mjpg-streamer-experimental/
./start.sh
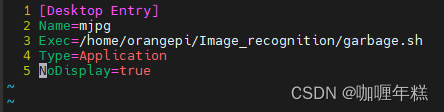
开机自启动 /etc/xdg/autostart路径.desktop文件
在 Linux 中,/etc/xdg/autostart 路径通常包含 .desktop 文件,这些文件用于配置在用户登录时自动启动的应用程序。这些文件使用桌面文件格式,以下是该目录下的 .desktop 文件的简单解析:
-
桌面文件格式:
.desktop文件是桌面应用程序的启动器文件,使用 FreeDesktop 标准的格式。它包含了应用程序的名称、图标、执行命令等信息。 -
样例
.desktop文件: 以下是一个简单的.desktop文件的例子:[Desktop Entry] Name=MyApp Exec=/path/to/myapp Icon=myapp-icon Type=ApplicationName: 应用程序的显示名称。Exec: 启动应用程序的命令。Icon: 应用程序的图标文件名。Type: 应用程序类型,可以是Application、Link等。
-
Autostart 目录:
/etc/xdg/autostart目录中的.desktop文件用于配置在用户登录时自动启动的应用程序。这些文件指定了在用户登录后要运行的命令。 -
用户自定义 Autostart 目录: 用户的 autostart 目录通常位于
~/.config/autostart。用户可以在这个目录中放置他们自己的.desktop文件,配置在他们登录时自动启动的应用程序。 -
启动时执行命令:
.desktop文件中的Exec字段指定了在启动时执行的命令。这可以是应用程序的可执行文件或者是一个脚本。
注意:在 /etc/xdg/autostart 目录中的 .desktop 文件通常是系统范围的,而用户的 autostart 目录中的文件是用户特定的。系统级别的 autostart 文件影响所有用户,而用户级别的 autostart 文件只影响特定用户。
mjgp.besktop
语音模块配置烧录及测试