笔记(三)maxflow push relabel与图像分割
- 1. Push-Relabel算法思想
- 2.Push-Relabel算法原理示意图
- 3.Push-Relabel算法具体实例
- 4. push relabel与图割
1. Push-Relabel算法思想
对于一个网络流图: 该算法直观可以这样理解,先在源节点处加入充足的流(跟源节点 s s s相连的所有边的容量之和),然后开始按一定规则进行流渗透,一个边一个边的向汇点渗透,直到没法再渗透(类似于Ford-Fulkerson算法中找不到增广路径了),那么这时再把一些剩余的流回收到源节点 s s s就可。
主要分为两个步骤:push和relabel。push表示从所有节点找出一个存水量大于0的节点 u u u,将它所存的水尽可能推向与它相邻的节点 v v v。要实现该push的操作必须满足下面条件:该点存水量 e ( u ) > 0 e(u)>0 e(u)>0,节点 u u u的高度大于节 v v v的高度。本次推送的流值 ( u , v ) . f = min e ( u ) , ( u , v ) . c a p a c i t y \mathbf{(u,v).f}= \min \mathbf{e(u)},\mathbf{(u,v).capacity} (u,v).f=mine(u),(u,v).capacity为边 e d g e ( u , v ) \mathbf{edge(u,v)} edge(u,v)的当前容量,这个值在推进过程中会一直变换。relabel表示某一个节点存水量大于0但水流不出去时,我们对该节点高度增加1,这就是所谓relabel操作,使得该节点的存水量流入比它低的节点。一开始的时候我们设置源节点高度为 N N N,此处 N N N为节点数,其他所有节点高度为0,并且汇节点的高度固定为0,其他节点高度在算法执行过程中高度 h h h会改变。
算法步骤:
1.初始化前置流:将与源点s相连的管道流量 f ( 0 , i ) f(0,i) f(0,i)设为该管道的容量,即 f ( 0 , i ) = c ( 0 , i ) f(0,i)=c(0,i) f(0,i)=c(0,i);将源点 s s s的高度 h ( 0 ) = V h(0)=V h(0)=V,( V V V表示图的顶点个数),其余顶点高度 h ( i ) = 0 h(i)=0 h(i)=0;将源的点余量 e ( 0 ) e(0) e(0)设为源容量减去源的流出量,即 e ( 0 ) = − ∑ f ( 0 , i ) = − ∑ c ( 0 , i ) e(0)=-∑f(0,i)=-∑c(0,i) e(0)=−∑f(0,i)=−∑c(0,i),与源 s s s相连的点余量设为该点的流入量 e ( i ) = c ( 0 , i ) e(i)=c(0,i) e(i)=c(0,i),其余点都为0。
2.搜索是否有节点的点余量 e ( u ) > 0 e(u)>0 e(u)>0,如果存在,表示要对该点进行操作——重标记或者压入流:检查与该点 u u u全部的相邻点 v v v,若该点比它相邻点的高度大 h ( u ) > h ( v ) h(u)>h(v) h(u)>h(v),该管道的当前容量为 c ( u , v ) c(u,v) c(u,v),将该点 u u u的余量以最大方式压入该管道 d e l t a = m i n ( e ( u ) , c ( u , v ) ) delta=min(e(u),c(u,v)) delta=min(e(u),c(u,v)),然后对节点 u u u, v v v的余量 e e e、边 ( u , v ) (u,v) (u,v)的容量进行相应的进行减加操作;如果找不到高度比自己低的相邻节点 v v v,则对节点 u u u的高度增加1,即 h ( u ) = h ( u ) + 1 h(u)=h(u)+1 h(u)=h(u)+1。如此继续进行Push操作。以上的重标记或压入流操作循环进行,直至该点的余量 e ( u ) e(u) e(u)为0。
3.重复第2步,直找不到余量大于0的节点,停止算法,最后输出汇点 t t t的余量 e ( t ) e(t) e(t),该值就是最后所求的最大流。最小割。
2.Push-Relabel算法原理示意图
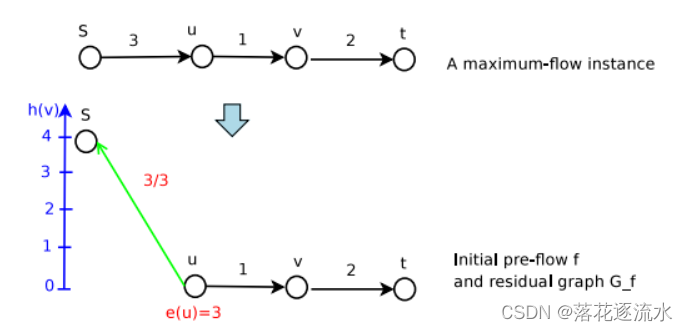
给定的网络流图如下:

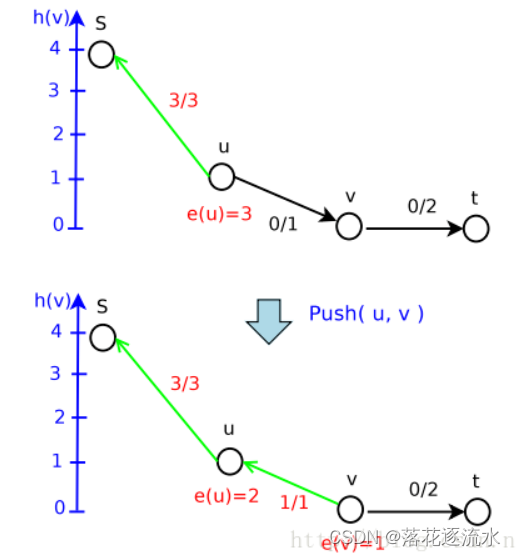
第一步:初始化操作:
第一次Push不成功,进行Relabel
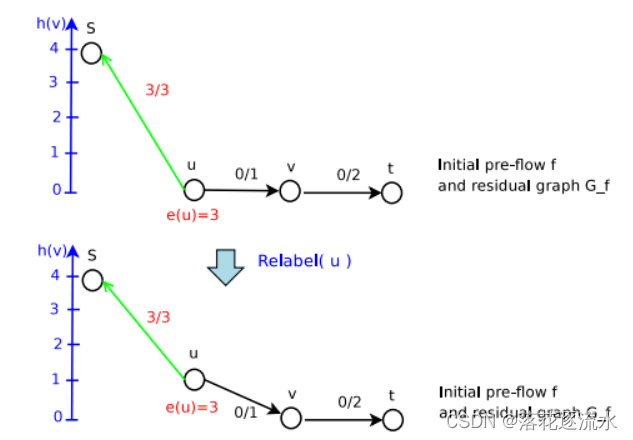
第二次Push,成功
继续Push
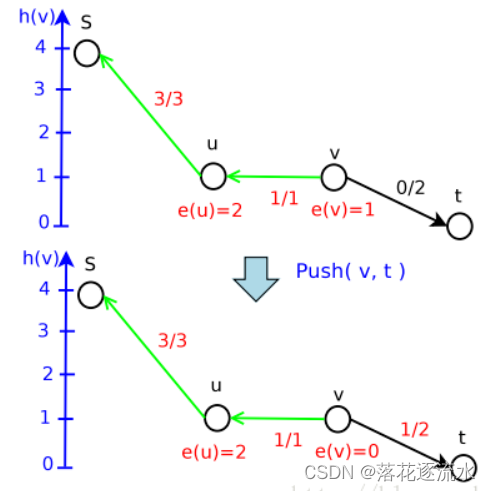
继续Push
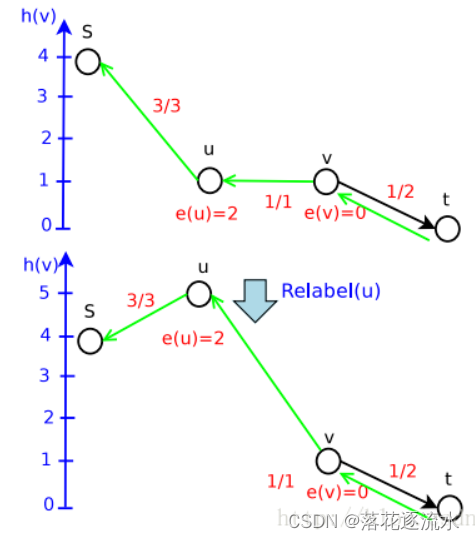
继续Push
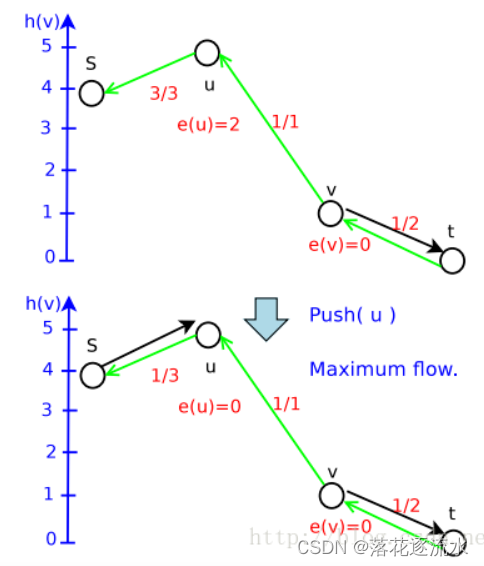
至此结束。
3.Push-Relabel算法具体实例
求解下面网络流图的最大流:
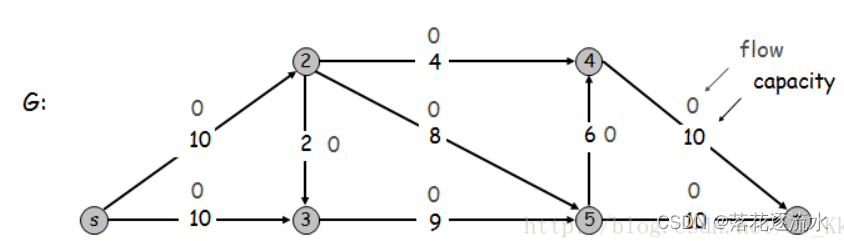
源节点为s
,汇节点为t
具体程序实现如下:
/****************************************************
Description:Push-Relabel算法求解网络最大流
Author:Robert.TY
Date:2016.12.10
****************************************************/
#include<iostream>
#include<limits>
#include<iomanip>
using namespace std;
struct Point{char ch;//节点标识 int e;//存货量int h;//高度
};
Point point[6];
int graph[6][6]={{0,10,10,0,0,0},{0,0,2,8,4,0},{0,0,0,9,0,0},{0,0,0,0,9,10},{0,0,0,0,0,10},{0,0,0,0,0,0}} ;
int Push_Relabel(int s, int t,int n); //参数为 起点 端点 节点数 int main(){ int n=6; point[0].ch='s'; point[0].e=0; point[0].h=0; point[1].ch='u'; point[1].e=0; point[1].h=0; point[2].ch='v'; point[2].e=0; point[2].h=0; point[3].ch='a'; point[3].e=0; point[3].h=0; point[4].ch='b'; point[4].e=0; point[4].h=0; point[5].ch='t'; point[5].e=0; point[5].h=0; cout<<"原始网络图邻接矩阵:"<<endl;for(int i=0;i<=5;i++){for(int j=0;j<=5;j++){cout<<setw(6)<<graph[i][j]<<" ";}cout<<endl;} cout<<"max_flow="<<Push_Relabel(0, n-1,n)<<endl; cout<<"graph流图矩阵:"<<endl;for(int i=0;i<=5;i++){for(int j=0;j<=5;j++){cout<<setw(6)<<graph[i][j]<<" ";}cout<<endl;} return 0;
} int Push_Relabel(int s, int t,int n)
{ int max_flow;point[s].h = n; //起始点高度置为n 最高//初始化 将start点的库存 流出去 update剩余图 for (int u = 1; u <= t; u++) { if (graph[s][u] > 0) { point[u].e = graph[s][u]; point[s].e -= graph[s][u]; graph[u][s] = graph[s][u]; graph[s][u] = 0; } }while(1) { int finishflag = 1; for (int u = s+1; u < t; u++) { //搜索除 节点s 节点t以外的节点 if (point[u].e > 0) { //发现库存量大于0的节点 u 进行push finishflag = 0; int relabel = 1; //先假设顶点u需要relabel 提高高度h for (int v = s; v <= t && point[u].e > 0; v++) { //搜索能push的顶点 if (graph[u][v] > 0 && point[u].h >point[v].h) { //发现节点v relabel = 0; //顶点u不需要relabelint bottleneck = min(graph[u][v], point[u].e); point[u].e -= bottleneck; //u节点库存量减少 point[v].e += bottleneck; //v节点库存量减少graph[u][v] -= bottleneck; graph[v][u] += bottleneck; } } if (relabel==1) { //没有可以push的顶点,u节点需要relabel 提高高度point[u].h += 1; } } } if (finishflag==1) { // 除源点和汇点外,每个顶点的e[i]都为0 max_flow = 0; for (int u = s; u <= t; u++) { if (graph[t][u] > 0) { max_flow += graph[t][u]; } } //cout<<"max_flow="<<max_flow<<endl;break; } } return max_flow;
} 结果如下:
原始网络图邻接矩阵:0 10 10 0 0 00 0 2 8 4 00 0 0 9 0 00 0 0 0 9 100 0 0 0 0 100 0 0 0 0 0
max_flow = 19
graph 流图矩阵:0 0 1 0 0 010 0 2 2 0 09 0 0 0 0 00 6 9 0 4 00 4 0 5 0 10 0 0 10 9 0--------------------------------
Process exited after 0.04971 seconds with return value 0Press ANY key to exit...
最大流可以通过最后一行的数值得到,即与t直接相关联的流量。
参考:最大流网络之Push-Relabel算法
4. push relabel与图割
Push-relabel算法是一种用于求解最大流问题的算法,也可以应用于图像分割领域。下面是将Push-relabel算法应用于图像分割的基本步骤:
构建图:首先,将输入图像转换为图的形式。每个像素被表示为一个节点,每个相邻的像素之间存在一条边,边的权重可以表示像素之间的差异或相似度。
初始化:对图进行初始化,通常将每个节点的标签初始化为一个唯一的整数。
推送流:从源节点开始,通过不断地推送流和重新标签化的操作,将流从源节点推送到汇节点。在这个过程中,Push-relabel算法会尝试将更多的流推送到已经饱和的节点,直到无法再推送更多的流为止。
重新标签:在推送流的过程中,当一个节点接收到的流超过其容量时,该节点会变得“饱和”。Push-relabel算法会为这个节点分配一个新的标签,并将这个节点与新标签之间的边进行更新。
更新残量网络:在推送流和重新标签的过程中,Push-relabel算法会不断更新残量网络,即还没有被推送到的边的集合。
判断终止条件:如果无法再找到新的增广路径(即无法再推送更多的流),则算法终止。
后处理:在得到最大流后,需要将结果映射回原始的图像。通常,可以将每个节点的标签映射为其所属的集合(即分割结果),或者将每个边的流量映射为边缘检测结果。
输出结果:最后,根据映射后的结果进行适当的后处理,如去除小面积的区域、平滑边缘等,以提高分割的质量。
通过以上步骤,可以使用Push-relabel算法进行图像分割。需要注意的是,Push-relabel算法通常会得到多解,因此需要进行合适的后处理和参数调整,以获得最佳的分割结果。
伪代码:
Push-relabel算法的伪代码如下:初始化:对于每个节点u,设置low_water_mark[u] = 0和high_water_mark[u] = INF(一个很大的数)
对于每个节点u,设置label[u] = 0和delta[u] = 0
对于每条边(u,v),设置residual_capacity[u,v] = capacity[u,v],residual_flow[u,v] = 0
while there is a path from source to sink in the residual graph:从源节点开始,使用DFS或BFS等搜索算法搜索增广路径
在搜索过程中,维护一个当前节点的集合C和一条从源节点到集合C的最小割
对于每个节点u,如果u不在C中且delta[u] > 0,执行push操作:
从集合C中选择一个节点v,使得(u,v)在residual_graph中且residual_capacity[u,v] > 0
将流从u推送到v,即令delta[v] = delta[v] + delta[u],residual_flow[u,v] = residual_flow[u,v] + delta[u],residual_capacity[u,v] = residual_capacity[u,v] - delta[u]
将low_water_mark[v]更新为low_water_mark[u] + delta[v],high_water_mark[v]更新为high_water_mark[u] + delta[v],label[v]更新为label[u] + delta[v]
将low_water_mark[u]更新为max(low_water_mark[u], high_water_mark[v]),high_water_mark[u]更新为max(high_water_mark[u], label[v]),label[u]更新为label[v] - delta[u]
输出结果:将每个节点的标签映射为其所属的集合(即分割结果),或者将每个边的流量映射为边缘检测结果。需要注意的是,Push-relabel算法通常会得到多解,因此需要进行合适的后处理和参数调整,以获得最佳的分割结果。