论文参考是这个
Geiger A, Moosmann F, Car Ö, et al. Automatic camera and range sensor calibration using a single shot[C]//Robotics and Automation (ICRA), 2012 IEEE International Conference on. IEEE, 2012: 3936-3943.
代码是这个github
花了一上午配好了c++环境。。。。。你们的,windows系统真不适合c++编程,下个opencv那么复杂,又是编译又是改这个配置改那个配置,一直用python的我真的要吐了喂。
最后用vs2022,好像还可以,你们的。靠。
vs2022+opencv_4_5_2
参考链接
主要是添加依赖库的时候,怎么去添加路径比较麻烦,什么bin、lib、dll乱七八糟的都得添加进去。
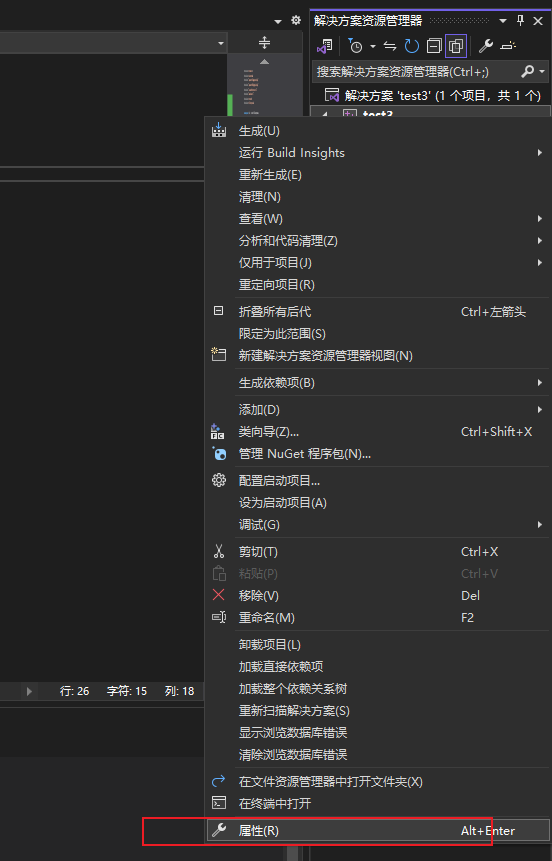
- 先是右键项目文件夹,点击最下面的属性。
- 再点击vc++目录,包含目录,右边的下拉三角,点击编辑
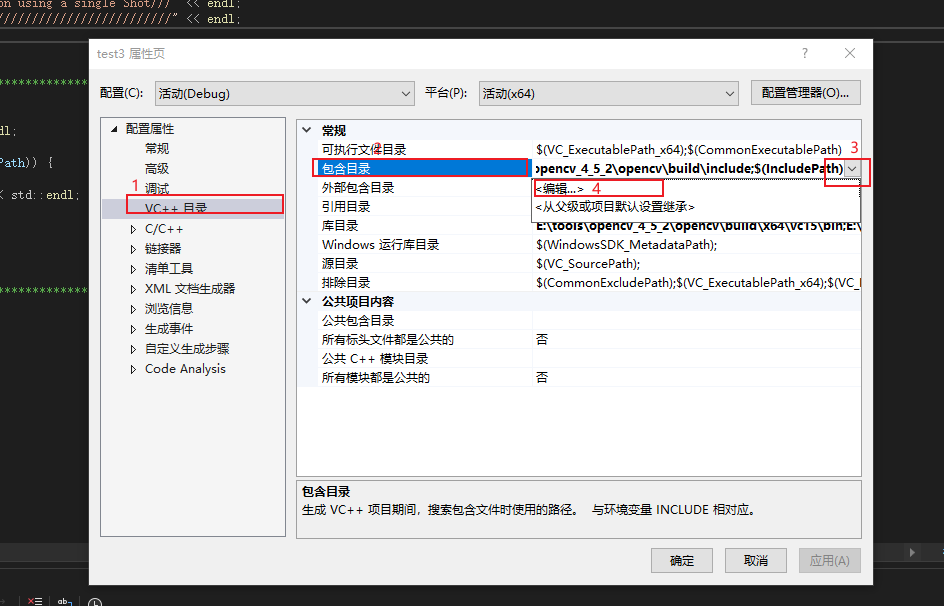
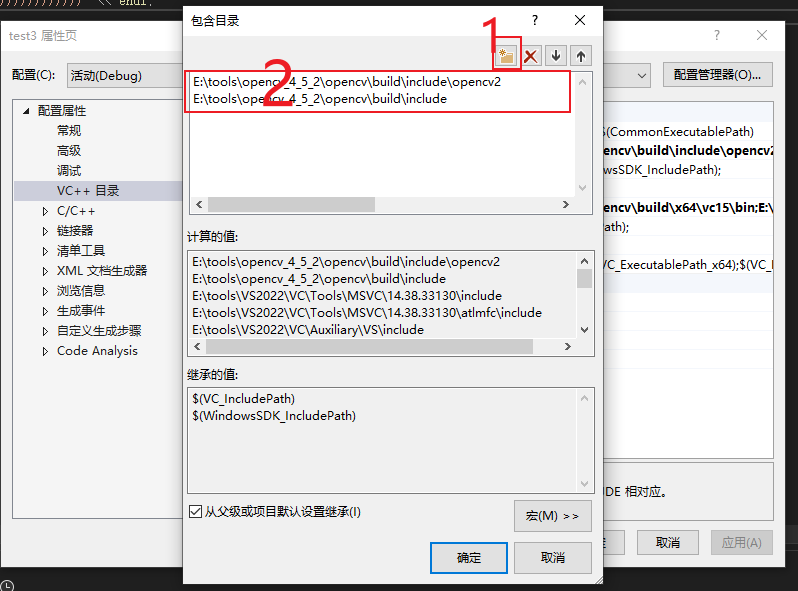
- 输入你的opencv的build的下面的两个路径,这两个路径我没查有什么用。
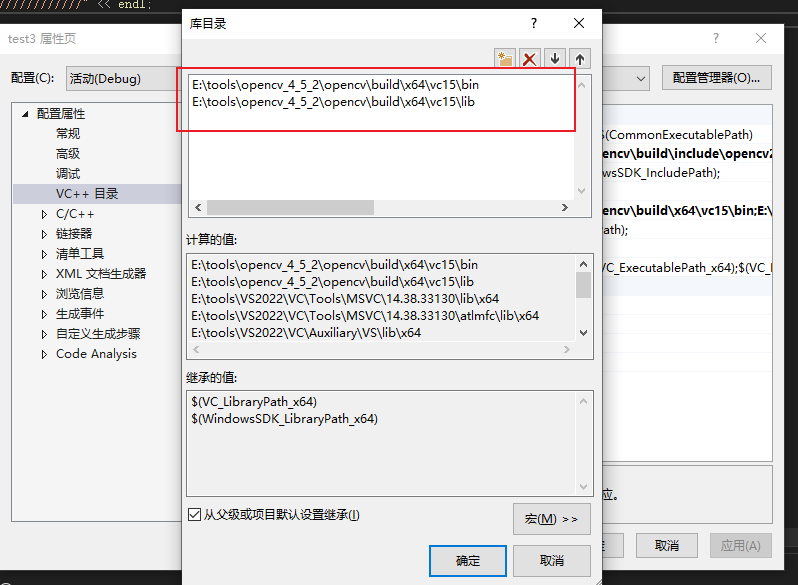
- 然后点击VC++下面的库目录,相同的操作
- 然后是链接/输入里面的附加依赖项
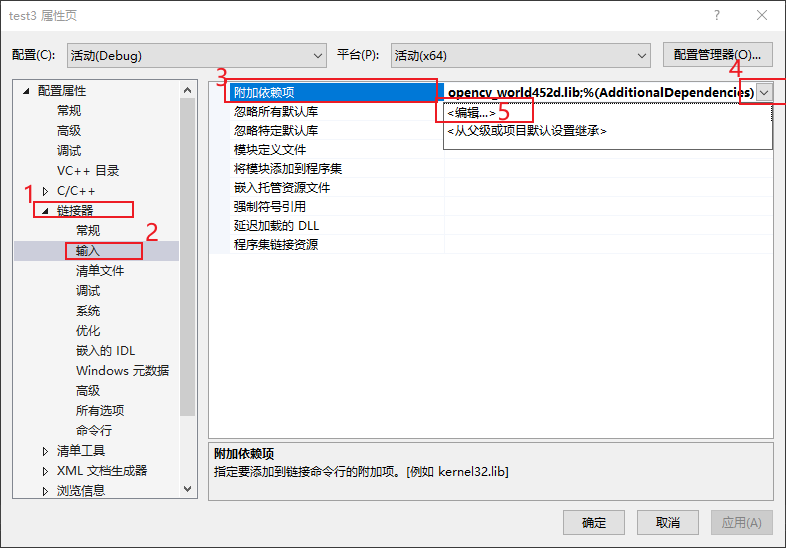
- 输入一个lib文件的路径
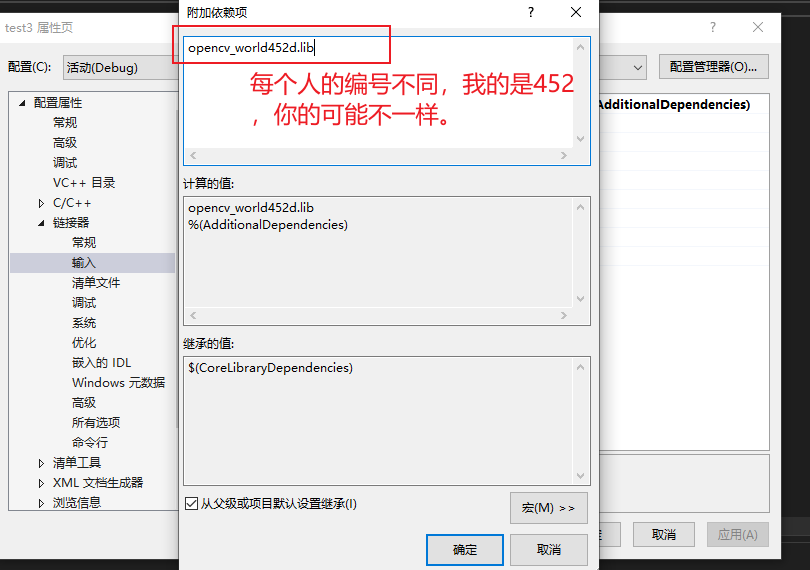
见这位仁兄的回答:
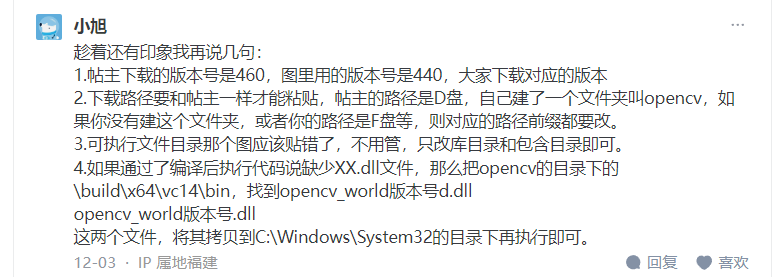
你的版本号在这:opencv的目录下的\build\x64\vc14\bin,找到opencv_world你的版本号.dll
小旭说要复制,我没复制,就是把版本号改了,然后再把…\opencv\build\x64\vc15\lib添加到VC++/库目录里面就行了(就是上面的第四步,已经添加了lib文件夹的就不用管了)。
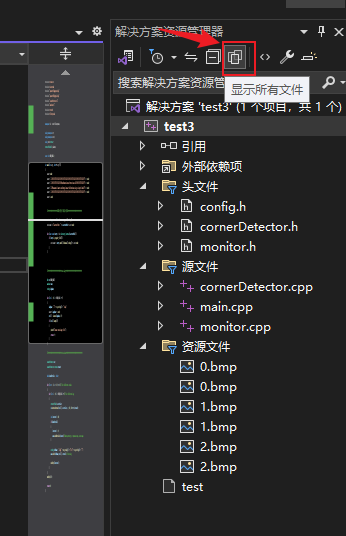
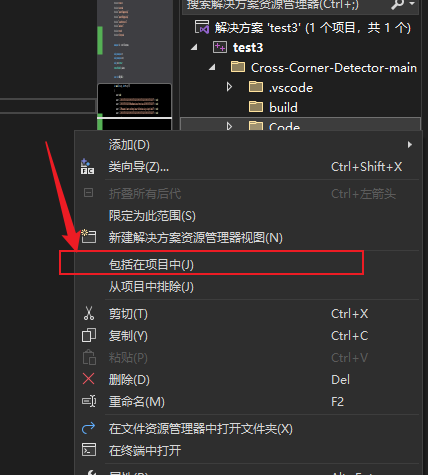
然后怎么运行一个本地的文件夹页花了我一些时间,目前我是新建了一个项目,把文件夹复制过去,然后先点击显示所有文件,再右键你的文件夹,点击包含到项目。
不过现在的问题是opencv读不到我的图片,很麻烦。没事了是我路径搞错了。。。。。。。。
C++17文件系统库 filestream.h
#include <filesystem>
namespace fs = std::filesystem;
...
...
...//********************读取文件夹下所有文件名******************************std::string currentPath = fs::current_path().string();std::cout << "Current Path: " << currentPath << std::endl;for (const auto& entry : fs::directory_iterator(currentPath)) {if (entry.is_regular_file()) {std::cout << entry.path().filename().string() << std::endl;}}
真的搞笑了,配了一天的环境,角点检测就这?

搞笑呢?
一个棋盘格识别的代码,cnn实现 code
opencv官方文档。地址