1.下载mask rcnn源码
此处使用的mask rcnn源码来自于B站博主霹雳吧啦Wz
2.安装labelme
sudo apt install python3-pyqt5
pip install labelme如果运行出现QT的错误,可能是与我一样遇到自己装了C++版本的QT
解决:运行命令 unset LD_LIBRARY_PATH
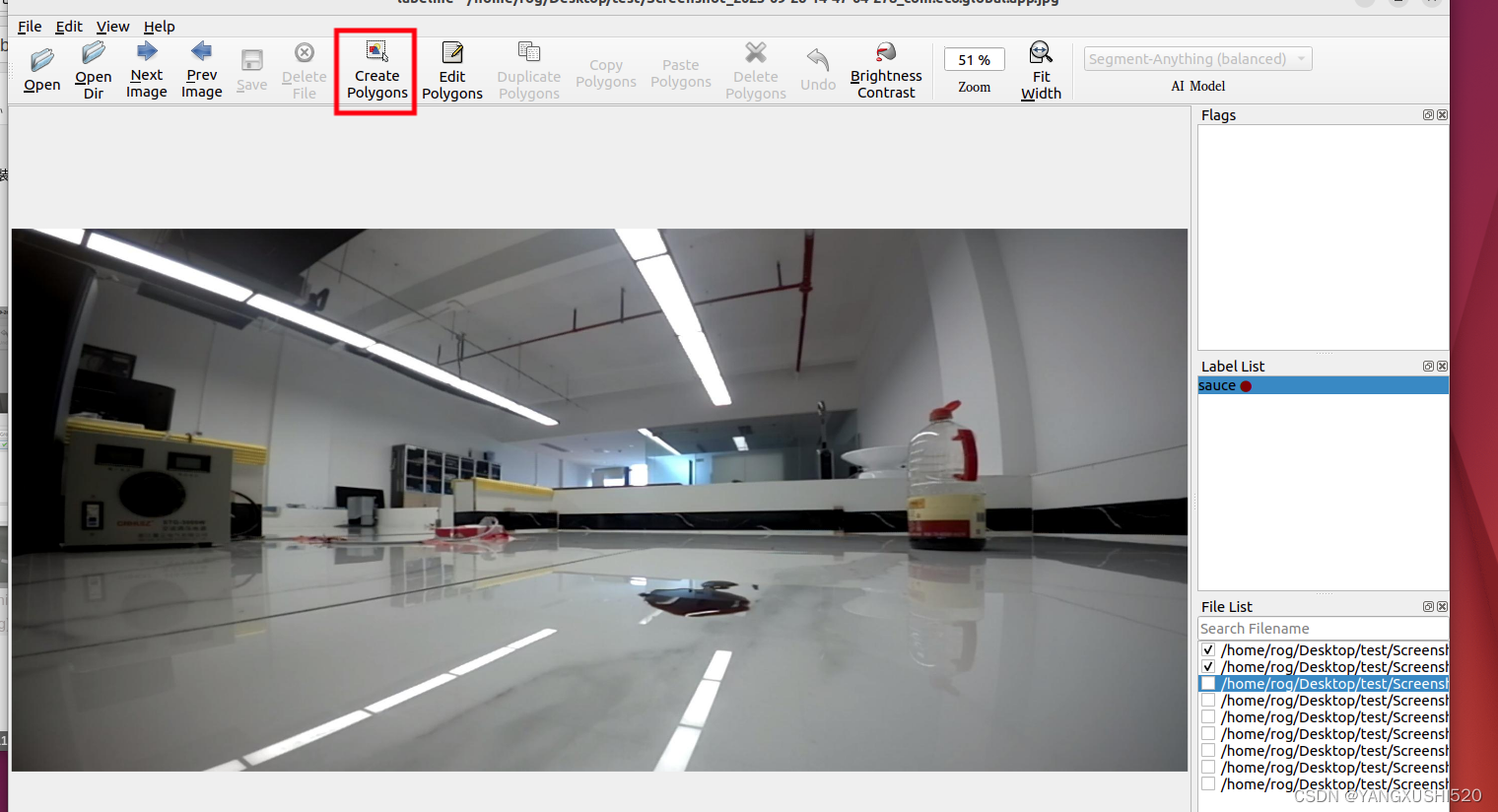
2.使用labelme对自己的图片进行标注
2.1 使用labelme打开自己的图片文件夹,点击如下的选项进行标注
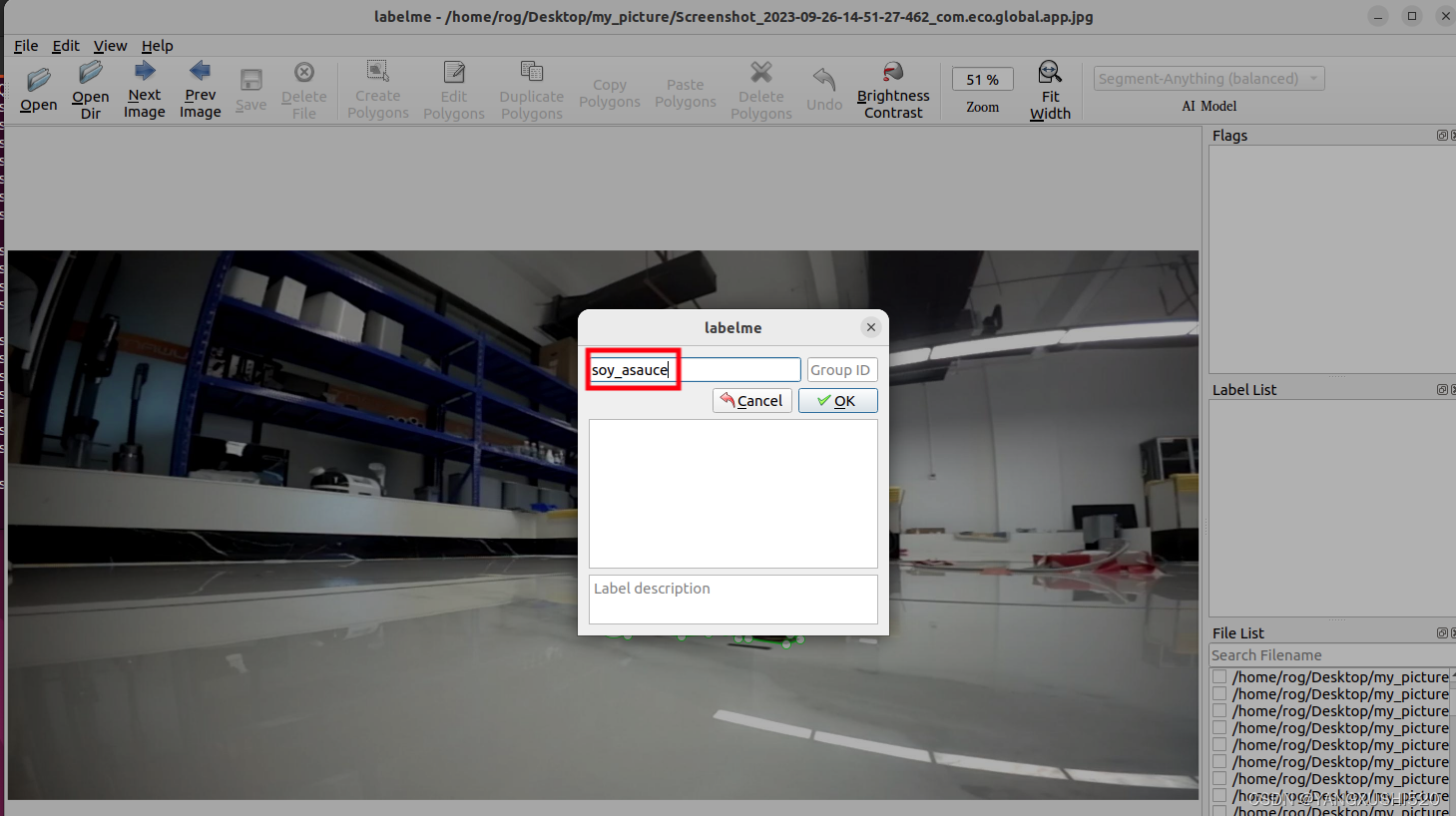
 2.2 标注完输入类别名
2.2 标注完输入类别名
2.3 点击保存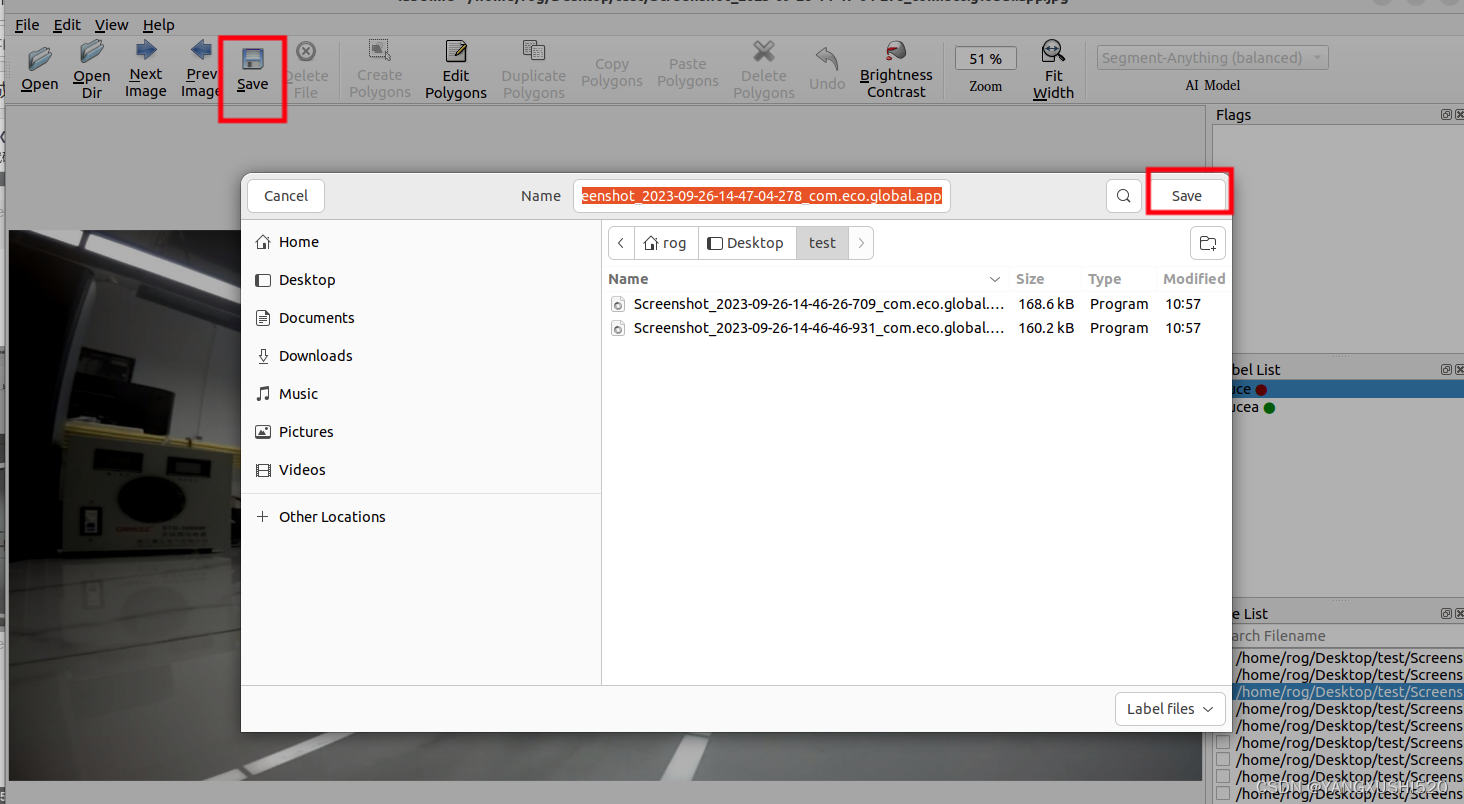
3.将labelme标注的数据格式转换为coco格式
转换代码提供如下:(参考:https://blog.csdn.net/qq_40243750/article/details/129843910)
在转换前先创建转换输出的文件夹 coco_test 在该文件夹下创建 annotations train val
mkdir coco_test
mkdir coco_test/annotations
mkdir coco_test/train
mkdir coco_test/val
执行转换命令:
python tools_x2coco.py --dataset_type labelme --json_input_dir ./image --image_input_dir ./image --output_dir ./coco_test --train_proportion 0.8 --val_proportion 0.2 --test_proportion 0.0
参数解释:
dataset_type:是将labelme转为coco,锁着这里默认就是labelme
json_input_dir:指向labelme的json文件所在路径
image_input_dir:指向labelme的img文件所在路径(在这里json和img都是相同的路径)
output_dir :转为coco后输出的文件夹路径
train_proportion、val_proportion、test_proportion:划分数据集比例,总之三者之和必须为1
#!/usr/bin/env python
# coding: utf-8
# Copyright (c) 2019 PaddlePaddle Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.# 参考:https://blog.csdn.net/qq_40243750/article/details/129843910 import argparse
import glob
import json
import os
import os.path as osp
import shutil
import xml.etree.ElementTree as ETimport numpy as np
import PIL.ImageDraw
from tqdm import tqdm
import cv2label_to_num = {}
categories_list = []
labels_list = []class MyEncoder(json.JSONEncoder):def default(self, obj):if isinstance(obj, np.integer):return int(obj)elif isinstance(obj, np.floating):return float(obj)elif isinstance(obj, np.ndarray):return obj.tolist()else:return super(MyEncoder, self).default(obj)def images_labelme(data, num):image = {}image['height'] = data['imageHeight']image['width'] = data['imageWidth']image['id'] = num + 1if '\\' in data['imagePath']:image['file_name'] = data['imagePath'].split('\\')[-1]else:image['file_name'] = data['imagePath'].split('/')[-1]return imagedef images_cityscape(data, num, img_file):image = {}image['height'] = data['imgHeight']image['width'] = data['imgWidth']image['id'] = num + 1image['file_name'] = img_filereturn imagedef categories(label, labels_list):category = {}category['supercategory'] = 'component'category['id'] = len(labels_list) + 1category['name'] = labelreturn categorydef annotations_rectangle(points, label, image_num, object_num, label_to_num):annotation = {}seg_points = np.asarray(points).copy()seg_points[1, :] = np.asarray(points)[2, :]seg_points[2, :] = np.asarray(points)[1, :]annotation['segmentation'] = [list(seg_points.flatten())]annotation['iscrowd'] = 0annotation['image_id'] = image_num + 1annotation['bbox'] = list(map(float, [points[0][0], points[0][1], points[1][0] - points[0][0], points[1][1] - points[0][1]]))annotation['area'] = annotation['bbox'][2] * annotation['bbox'][3]annotation['category_id'] = label_to_num[label]annotation['id'] = object_num + 1return annotationdef annotations_polygon(height, width, points, label, image_num, object_num,label_to_num):annotation = {}annotation['segmentation'] = [list(np.asarray(points).flatten())]annotation['iscrowd'] = 0annotation['image_id'] = image_num + 1annotation['bbox'] = list(map(float, get_bbox(height, width, points)))annotation['area'] = annotation['bbox'][2] * annotation['bbox'][3]annotation['category_id'] = label_to_num[label]annotation['id'] = object_num + 1return annotationdef get_bbox(height, width, points):polygons = pointsmask = np.zeros([height, width], dtype=np.uint8)mask = PIL.Image.fromarray(mask)xy = list(map(tuple, polygons))PIL.ImageDraw.Draw(mask).polygon(xy=xy, outline=1, fill=1)mask = np.array(mask, dtype=bool)index = np.argwhere(mask == 1)rows = index[:, 0]clos = index[:, 1]left_top_r = np.min(rows)left_top_c = np.min(clos)right_bottom_r = np.max(rows)right_bottom_c = np.max(clos)return [left_top_c, left_top_r, right_bottom_c - left_top_c,right_bottom_r - left_top_r]def deal_json(ds_type, img_path, json_path):data_coco = {}images_list = []annotations_list = []image_num = -1object_num = -1for img_file in os.listdir(img_path):img_label = os.path.splitext(img_file)[0]if img_file.split('.')[-1] not in ['bmp', 'jpg', 'jpeg', 'png', 'JPEG', 'JPG', 'PNG']:continuelabel_file = osp.join(json_path, img_label + '.json')print('Generating dataset from:', label_file)image_num = image_num + 1with open(label_file) as f:data = json.load(f)if ds_type == 'labelme':images_list.append(images_labelme(data, image_num))elif ds_type == 'cityscape':images_list.append(images_cityscape(data, image_num, img_file))if ds_type == 'labelme':for shapes in data['shapes']:object_num = object_num + 1label = shapes['label']if label not in labels_list:categories_list.append(categories(label, labels_list))labels_list.append(label)label_to_num[label] = len(labels_list)p_type = shapes['shape_type']if p_type == 'polygon':points = shapes['points']annotations_list.append(annotations_polygon(data['imageHeight'], data['imageWidth'], points, label, image_num,object_num, label_to_num))if p_type == 'rectangle':(x1, y1), (x2, y2) = shapes['points']x1, x2 = sorted([x1, x2])y1, y2 = sorted([y1, y2])points = [[x1, y1], [x2, y2], [x1, y2], [x2, y1]]annotations_list.append(annotations_rectangle(points, label, image_num,object_num, label_to_num))elif ds_type == 'cityscape':for shapes in data['objects']:object_num = object_num + 1label = shapes['label']if label not in labels_list:categories_list.append(categories(label, labels_list))labels_list.append(label)label_to_num[label] = len(labels_list)points = shapes['polygon']annotations_list.append(annotations_polygon(data['imgHeight'], data['imgWidth'], points, label, image_num, object_num,label_to_num))data_coco['images'] = images_listdata_coco['categories'] = categories_listdata_coco['annotations'] = annotations_listreturn data_cocodef voc_get_label_anno(ann_dir_path, ann_ids_path, labels_path):with open(labels_path, 'r') as f:labels_str = f.read().split()labels_ids = list(range(1, len(labels_str) + 1))with open(ann_ids_path, 'r') as f:ann_ids = [lin.strip().split(' ')[-1] for lin in f.readlines()]ann_paths = []for aid in ann_ids:if aid.endswith('xml'):ann_path = os.path.join(ann_dir_path, aid)else:ann_path = os.path.join(ann_dir_path, aid + '.xml')ann_paths.append(ann_path)return dict(zip(labels_str, labels_ids)), ann_pathsdef voc_get_image_info(annotation_root, im_id):filename = annotation_root.findtext('filename')assert filename is not Noneimg_name = os.path.basename(filename)size = annotation_root.find('size')width = float(size.findtext('width'))height = float(size.findtext('height'))image_info = {'file_name': filename,'height': height,'width': width,'id': im_id}return image_infodef voc_get_coco_annotation(obj, label2id):label = obj.findtext('name')assert label in label2id, "label is not in label2id."category_id = label2id[label]bndbox = obj.find('bndbox')xmin = float(bndbox.findtext('xmin'))ymin = float(bndbox.findtext('ymin'))xmax = float(bndbox.findtext('xmax'))ymax = float(bndbox.findtext('ymax'))assert xmax > xmin and ymax > ymin, "Box size error."o_width = xmax - xmino_height = ymax - yminanno = {'area': o_width * o_height,'iscrowd': 0,'bbox': [xmin, ymin, o_width, o_height],'category_id': category_id,'ignore': 0,}return annodef voc_xmls_to_cocojson(annotation_paths, label2id, output_dir, output_file):output_json_dict = {"images": [],"type": "instances","annotations": [],"categories": []}bnd_id = 1 # bounding box start idim_id = 0print('Start converting !')for a_path in tqdm(annotation_paths):# Read annotation xmlann_tree = ET.parse(a_path)ann_root = ann_tree.getroot()img_info = voc_get_image_info(ann_root, im_id)output_json_dict['images'].append(img_info)for obj in ann_root.findall('object'):ann = voc_get_coco_annotation(obj=obj, label2id=label2id)ann.update({'image_id': im_id, 'id': bnd_id})output_json_dict['annotations'].append(ann)bnd_id = bnd_id + 1im_id += 1for label, label_id in label2id.items():category_info = {'supercategory': 'none', 'id': label_id, 'name': label}output_json_dict['categories'].append(category_info)output_file = os.path.join(output_dir, output_file)with open(output_file, 'w') as f:output_json = json.dumps(output_json_dict)f.write(output_json)def widerface_to_cocojson(root_path):train_gt_txt = os.path.join(root_path, "wider_face_split", "wider_face_train_bbx_gt.txt")val_gt_txt = os.path.join(root_path, "wider_face_split", "wider_face_val_bbx_gt.txt")train_img_dir = os.path.join(root_path, "WIDER_train", "images")val_img_dir = os.path.join(root_path, "WIDER_val", "images")assert train_gt_txtassert val_gt_txtassert train_img_dirassert val_img_dirsave_path = os.path.join(root_path, "widerface_train.json")widerface_convert(train_gt_txt, train_img_dir, save_path)print("Wider Face train dataset converts sucess, the json path: {}".format(save_path))save_path = os.path.join(root_path, "widerface_val.json")widerface_convert(val_gt_txt, val_img_dir, save_path)print("Wider Face val dataset converts sucess, the json path: {}".format(save_path))def widerface_convert(gt_txt, img_dir, save_path):output_json_dict = {"images": [],"type": "instances","annotations": [],"categories": [{'supercategory': 'none', 'id': 0, 'name': "human_face"}]}bnd_id = 1 # bounding box start idim_id = 0print('Start converting !')with open(gt_txt) as fd:lines = fd.readlines()i = 0while i < len(lines):image_name = lines[i].strip()bbox_num = int(lines[i + 1].strip())i += 2img_info = get_widerface_image_info(img_dir, image_name, im_id)if img_info:output_json_dict["images"].append(img_info)for j in range(i, i + bbox_num):anno = get_widerface_ann_info(lines[j])anno.update({'image_id': im_id, 'id': bnd_id})output_json_dict['annotations'].append(anno)bnd_id += 1else:print("The image dose not exist: {}".format(os.path.join(img_dir, image_name)))bbox_num = 1 if bbox_num == 0 else bbox_numi += bbox_numim_id += 1with open(save_path, 'w') as f:output_json = json.dumps(output_json_dict)f.write(output_json)def get_widerface_image_info(img_root, img_relative_path, img_id):image_info = {}save_path = os.path.join(img_root, img_relative_path)if os.path.exists(save_path):img = cv2.imread(save_path)image_info["file_name"] = os.path.join(os.path.basename(os.path.dirname(img_root)), os.path.basename(img_root),img_relative_path)image_info["height"] = img.shape[0]image_info["width"] = img.shape[1]image_info["id"] = img_idreturn image_infodef get_widerface_ann_info(info):info = [int(x) for x in info.strip().split()]anno = {'area': info[2] * info[3],'iscrowd': 0,'bbox': [info[0], info[1], info[2], info[3]],'category_id': 0,'ignore': 0,'blur': info[4],'expression': info[5],'illumination': info[6],'invalid': info[7],'occlusion': info[8],'pose': info[9]}return annodef main():parser = argparse.ArgumentParser(formatter_class=argparse.ArgumentDefaultsHelpFormatter)parser.add_argument('--dataset_type',help='the type of dataset, can be `voc`, `widerface`, `labelme` or `cityscape`')parser.add_argument('--json_input_dir', help='input annotated directory')parser.add_argument('--image_input_dir', help='image directory')parser.add_argument('--output_dir', help='output dataset directory', default='./')parser.add_argument('--train_proportion',help='the proportion of train dataset',type=float,default=1.0)parser.add_argument('--val_proportion',help='the proportion of validation dataset',type=float,default=0.0)parser.add_argument('--test_proportion',help='the proportion of test dataset',type=float,default=0.0)parser.add_argument('--voc_anno_dir',help='In Voc format dataset, path to annotation files directory.',type=str,default=None)parser.add_argument('--voc_anno_list',help='In Voc format dataset, path to annotation files ids list.',type=str,default=None)parser.add_argument('--voc_label_list',help='In Voc format dataset, path to label list. The content of each line is a category.',type=str,default=None)parser.add_argument('--voc_out_name',type=str,default='voc.json',help='In Voc format dataset, path to output json file')parser.add_argument('--widerface_root_dir',help='The root_path for wider face dataset, which contains `wider_face_split`, `WIDER_train` and `WIDER_val`.And the json file will save in this path',type=str,default=None)args = parser.parse_args()try:assert args.dataset_type in ['voc', 'labelme', 'cityscape', 'widerface']except AssertionError as e:print('Now only support the voc, cityscape dataset and labelme dataset!!')os._exit(0)if args.dataset_type == 'voc':assert args.voc_anno_dir and args.voc_anno_list and args.voc_label_listlabel2id, ann_paths = voc_get_label_anno(args.voc_anno_dir, args.voc_anno_list, args.voc_label_list)voc_xmls_to_cocojson(annotation_paths=ann_paths,label2id=label2id,output_dir=args.output_dir,output_file=args.voc_out_name)elif args.dataset_type == "widerface":assert args.widerface_root_dirwiderface_to_cocojson(args.widerface_root_dir)else:try:assert os.path.exists(args.json_input_dir)except AssertionError as e:print('The json folder does not exist!')os._exit(0)try:assert os.path.exists(args.image_input_dir)except AssertionError as e:print('The image folder does not exist!')os._exit(0)try:assert abs(args.train_proportion + args.val_proportion \+ args.test_proportion - 1.0) < 1e-5except AssertionError as e:print('The sum of pqoportion of training, validation and test datase must be 1!')os._exit(0)# Allocate the dataset.total_num = len(glob.glob(osp.join(args.json_input_dir, '*.json')))if args.train_proportion != 0:train_num = int(total_num * args.train_proportion)out_dir = args.output_dir + '/train'if not os.path.exists(out_dir):os.makedirs(out_dir)else:train_num = 0if args.val_proportion == 0.0:val_num = 0test_num = total_num - train_numout_dir = args.output_dir + '/test'if args.test_proportion != 0.0 and not os.path.exists(out_dir):os.makedirs(out_dir)else:val_num = int(total_num * args.val_proportion)test_num = total_num - train_num - val_numval_out_dir = args.output_dir + '/val'if not os.path.exists(val_out_dir):os.makedirs(val_out_dir)test_out_dir = args.output_dir + '/test'if args.test_proportion != 0.0 and not os.path.exists(test_out_dir):os.makedirs(test_out_dir)count = 1for img_name in os.listdir(args.image_input_dir):if count <= train_num:if osp.exists(args.output_dir + '/train/'):shutil.copyfile(osp.join(args.image_input_dir, img_name),osp.join(args.output_dir + '/train/', img_name))else:if count <= train_num + val_num:if osp.exists(args.output_dir + '/val/'):shutil.copyfile(osp.join(args.image_input_dir, img_name),osp.join(args.output_dir + '/val/', img_name))else:if osp.exists(args.output_dir + '/test/'):shutil.copyfile(osp.join(args.image_input_dir, img_name),osp.join(args.output_dir + '/test/', img_name))count = count + 1# Deal with the json files.if not os.path.exists(args.output_dir + '/annotations'):os.makedirs(args.output_dir + '/annotations')if args.train_proportion != 0:train_data_coco = deal_json(args.dataset_type,args.output_dir + '/train',args.json_input_dir)train_json_path = osp.join(args.output_dir + '/annotations','instance_train.json')json.dump(train_data_coco,open(train_json_path, 'w'),indent=4,cls=MyEncoder)if args.val_proportion != 0:val_data_coco = deal_json(args.dataset_type,args.output_dir + '/val',args.json_input_dir)val_json_path = osp.join(args.output_dir + '/annotations','instance_val.json')json.dump(val_data_coco,open(val_json_path, 'w'),indent=4,cls=MyEncoder)if args.test_proportion != 0:test_data_coco = deal_json(args.dataset_type,args.output_dir + '/test',args.json_input_dir)test_json_path = osp.join(args.output_dir + '/annotations','instance_test.json')json.dump(test_data_coco,open(test_json_path, 'w'),indent=4,cls=MyEncoder)if __name__ == '__main__':"""python tools/x2coco.py \--dataset_type labelme \--json_input_dir ./image/ \--image_input_dir ./image/ \--output_dir ./mycoco/ \--train_proportion 0.8 \--val_proportion 0.2 \--test_proportion 0.0"""main()转换结束,可以看到coco_test/annotations coco_test/train coco_test/val 三个文件夹下都有coco格式数据了

4.修改mask rcnn源码训练生成的coco数据集
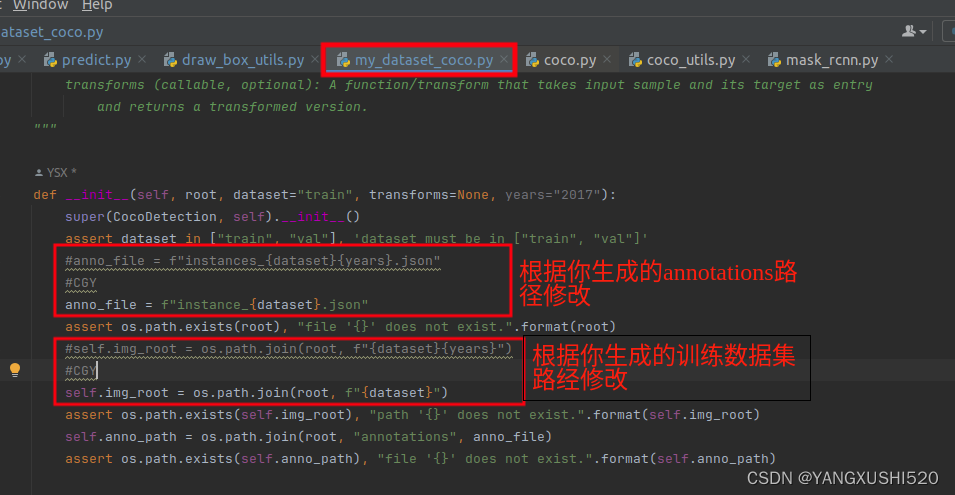

比如我转换后的数据集路径:
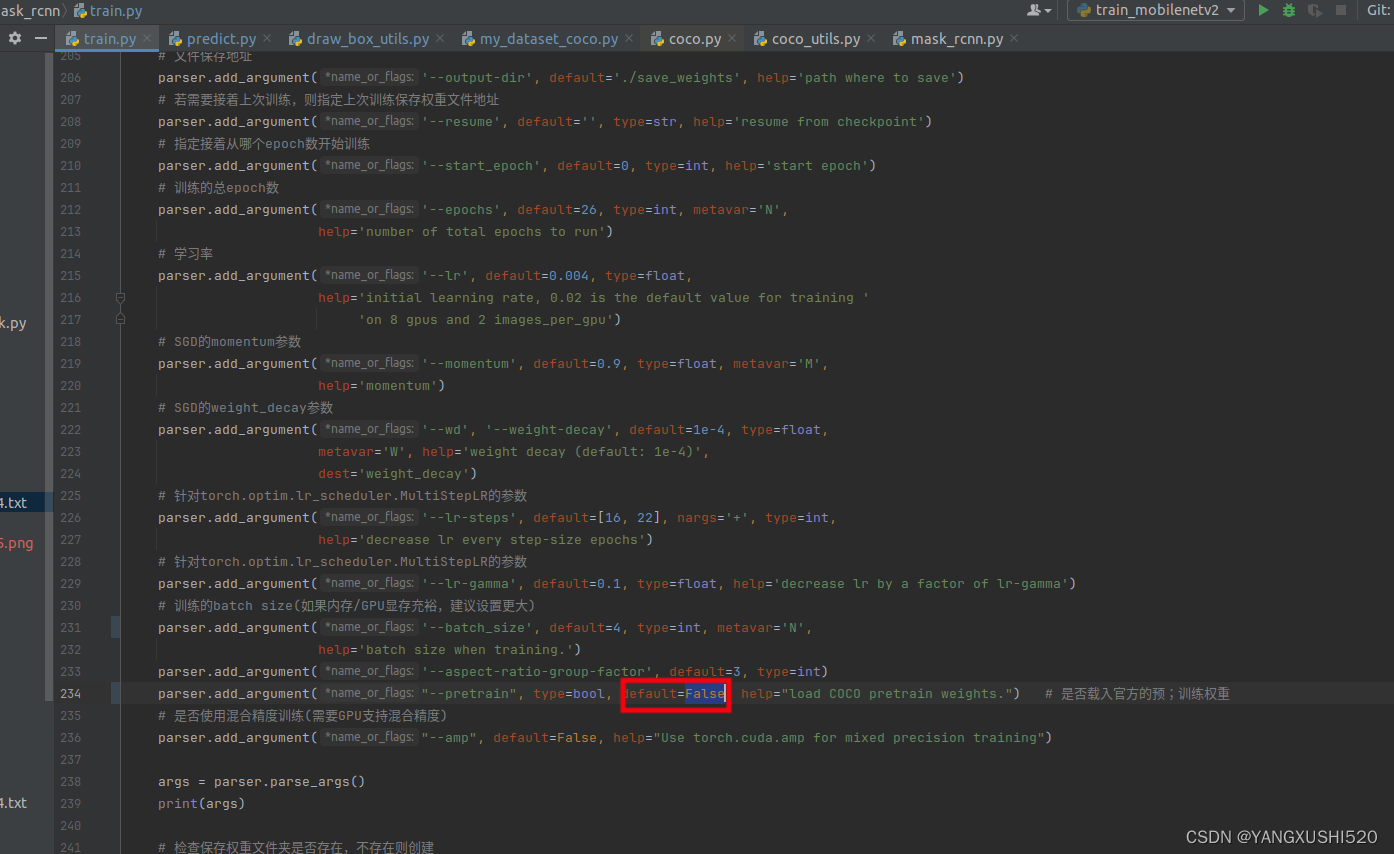
 不载入预训练权重、
不载入预训练权重、
预测修改:

完!