关于内外参矩阵和畸变矩阵可以学习
https://blog.csdn.net/qq_30815237/article/details/87530011?spm=1001.2014.3001.5506
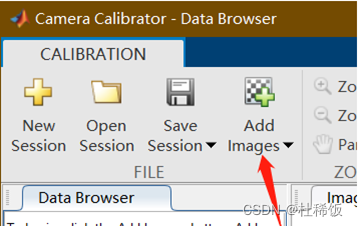
在APP中找到 camera Calibrator

点击 Add Images,导入拍照图片。标定20张左右就够了,然后角度变一下,但不需要变太大,太大了会影响标定效果。标定板最好在视场中心,且占据较大面积。
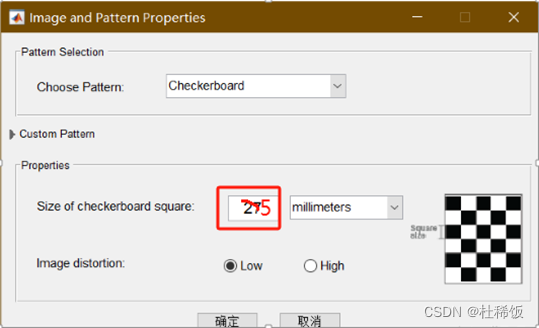
修改棋盘格大小,我的是5
对于标准相机,菜单栏的option里选择三阶径向畸变和斜切:
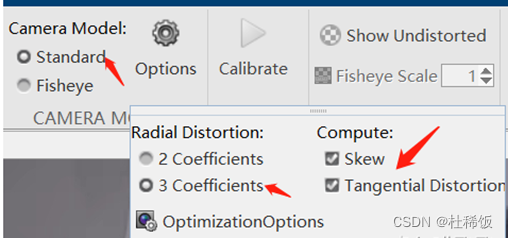
而鱼眼相机,选择

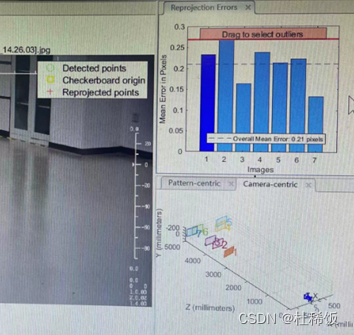
点击Calibrate,进行相机标定:
右上角是重建平均误差,只要平均误差小于0.5,就可以认为这是相机标定的结果是可靠的。我试了一下0.3以下误差更小。

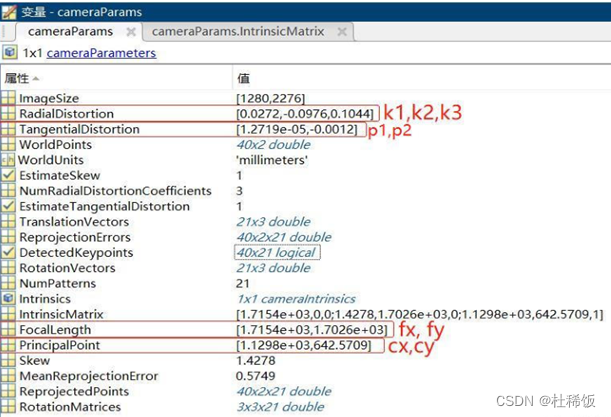
把相机参数导出来,点击 Export Camera Parameters。点击确定,就可以看到matlab工作区出现了相机参数。点开这个参数,就可以得到相机的各个参数:

如果别人保存下来的这参数,在自己的matlab上打不开,可以点“布局” ,把变量的窗口打开。
如果是隐藏的话,命令行看着没什么问题,但是参数就是不显示。