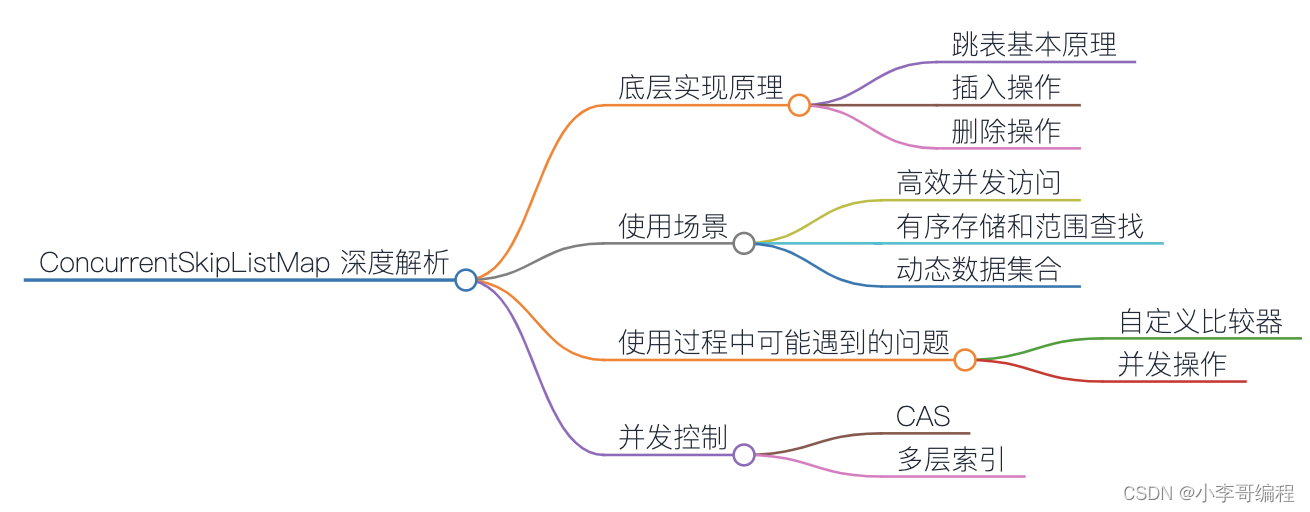
思维导图

机械臂
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <myhead.h>
#define SER_PORT 8888
#define SER_IP "192.168.122.68" //服务端//TCP客户端
int main(int argc, const char *argv[])
{//创建套接字int sfd = socket(AF_INET,SOCK_STREAM,0);if(sfd == -1){perror("socket error");return -1;}//链接服务器//填充地址信息结构体struct sockaddr_in sin;sin.sin_family = AF_INET;sin.sin_port = htons(SER_PORT);sin.sin_addr.s_addr = inet_addr(SER_IP);//链接服务器if(connect(sfd,(struct sockaddr*)&sin,sizeof(sin)) == -1){perror("connect error");return -1;}//收发数据char rbuf[5]={0xff,0x02,0x00,0xa6,0xff}; //红色手臂unsigned char wbuf[5]={0xff,0x02,0x01,0x00,0xff}; //蓝色手臂char key = 0; //接收按键while(1){printf("请输入:");scanf("%c",&key);getchar(); //吸收回车//对输入的字符进行多分支选择switch(key){case 'w':rbuf[3] += 2;if(rbuf[3] >= 90){rbuf[3] = 90;}send(sfd,rbuf,sizeof(rbuf),0);break;case 's':rbuf[3] += 2;if(rbuf[3] >= 90){rbuf[3] = 90;}send(sfd,rbuf,sizeof(rbuf),0);break;case 'a':wbuf[3] += 2;if(wbuf[3] >= 90){wbuf[3] = 90;}send(sfd,wbuf,sizeof(wbuf),0);break;case 'd':wbuf[3] += 2;if(wbuf[3] >= 90){wbuf[3] = 90;}send(sfd,wbuf,sizeof(wbuf),0);break;default:printf("error\n");}//判断退出if(key == 'q' || key == 'Q'){break; //结束循环}}//关闭套接字close(sfd);return 0;
}