YOLO系列算法俯视视角下舰船目标检测
- 数据集和模型
- YOLO系列算法俯视视角下舰船目标检测
- YOLO系列算法俯视视角下舰船目标检测可视化结果
数据集和模型
数据和模型下载:
- YOLOv6俯视视角下舰船目标检测+训练好的舰船目标检测模型+舰船目标检测数据
- YOLOv7俯视视角下舰船目标检测+训练好的舰船目标检测模型+舰船目标检测数据
- YOLOv8俯视视角下舰船目标检测+训练好的舰船目标检测模型+舰船目标检测数据集
- Yolov3俯视视角下舰船目标检测+训练好的舰船目标检测模型+舰船目标检测数据集
- yolov5俯视视角下舰船目标检测+训练好的舰船目标检测模型+舰船目标检测数据集+pyqt界面
- yolov5俯视视角下舰船目标检测+训练好的舰船目标检测模型+舰船目标检测数据集
其他场景舰船检测模型参考:https://blog.csdn.net/zhiqingAI/article/details/124230743
YOLO系列算法俯视视角下舰船目标检测
以yolov6算法为例,YOLOv6(You Only Look Once version 6)是一种先进的实时目标检测算法,它在计算机视觉领域具有广泛的应用。在俯视视角下进行舰船目标检测是一个重要的应用场景,例如在卫星遥感图像分析、海洋监控和海上搜救等任务中。通过使用YOLOv6算法,我们可以实时地检测和识别舰船目标,从而提高任务效率和准确性。
为了实现YOLOv6在俯视视角下的舰船目标检测,我们需要进行以下几个步骤:
-
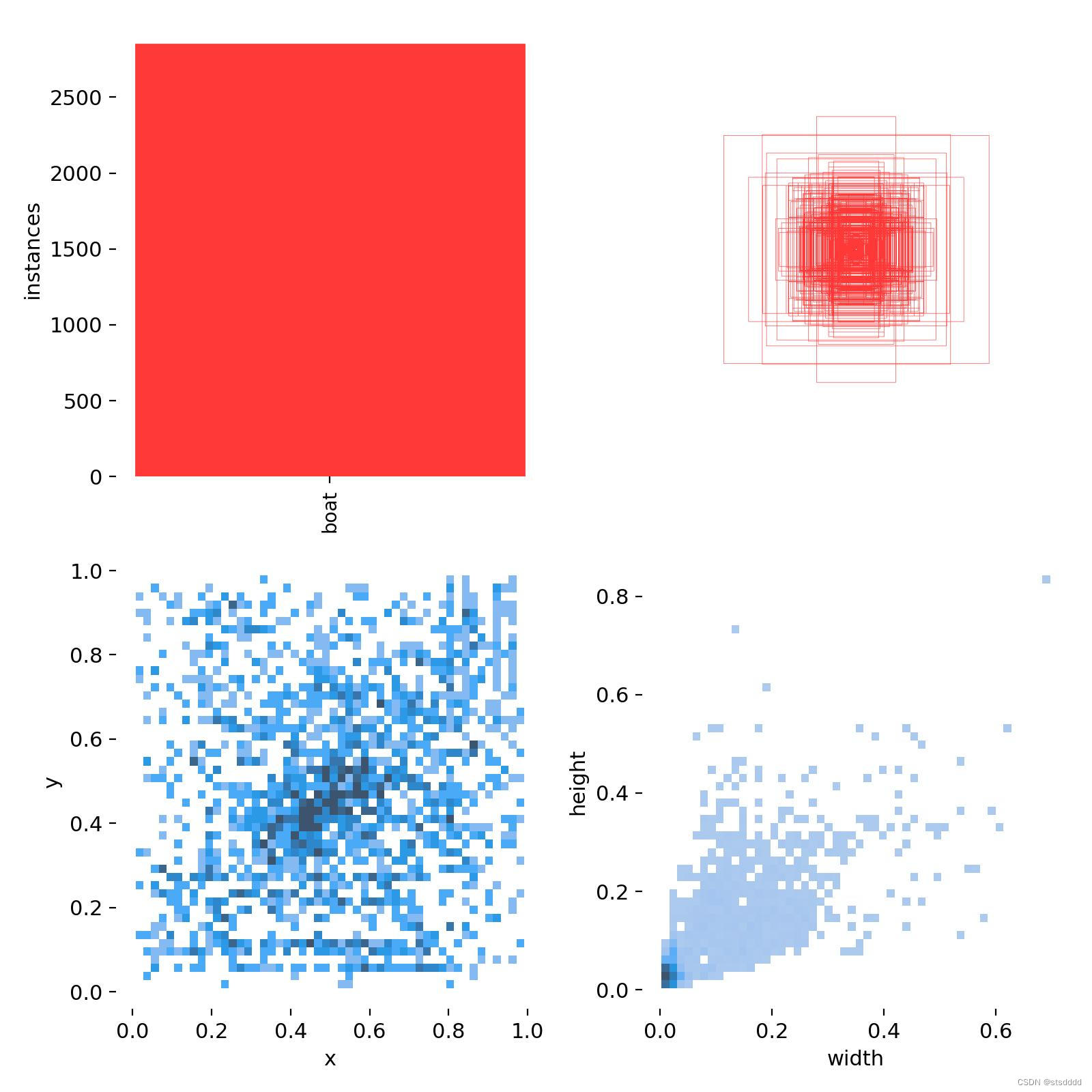
数据准备:首先,我们需要收集大量的俯视视角下的舰船图像数据。这些数据可以从卫星遥感图像、无人机拍摄的图像或者其他途径获取。然后,我们需要对这些图像进行标注,即在图像中标出舰船的位置和类别。这一步骤可以通过人工标注或者半自动标注的方式进行。
-
模型训练:接下来,我们需要使用收集到的标注数据来训练YOLOv6模型。在训练过程中,模型会学习到如何从俯视视角下的图像中检测出舰船目标。为了提高模型的泛化能力,我们还可以采用数据增强技术,如旋转、缩放、翻转等,来扩充训练数据集。
-
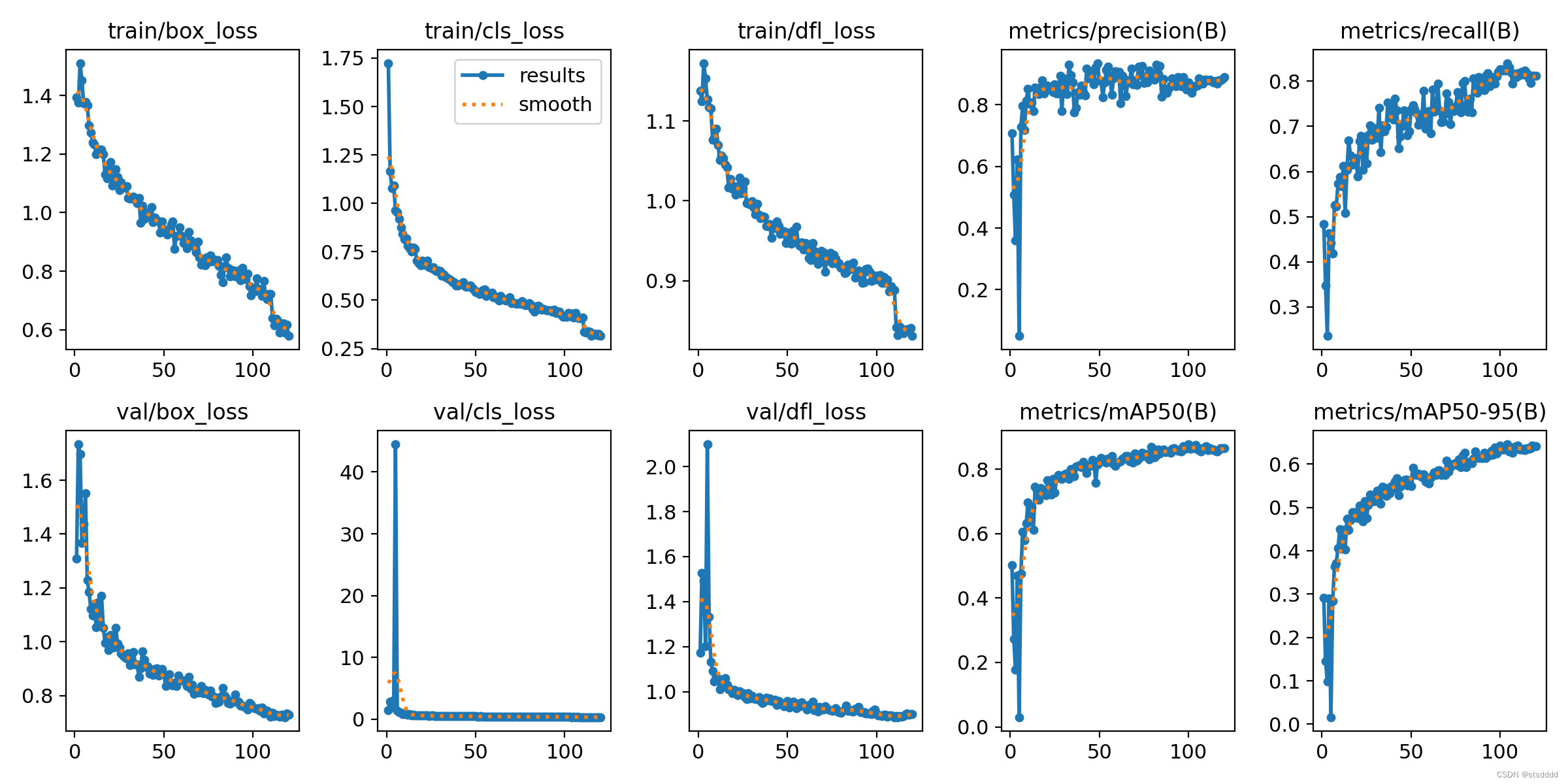
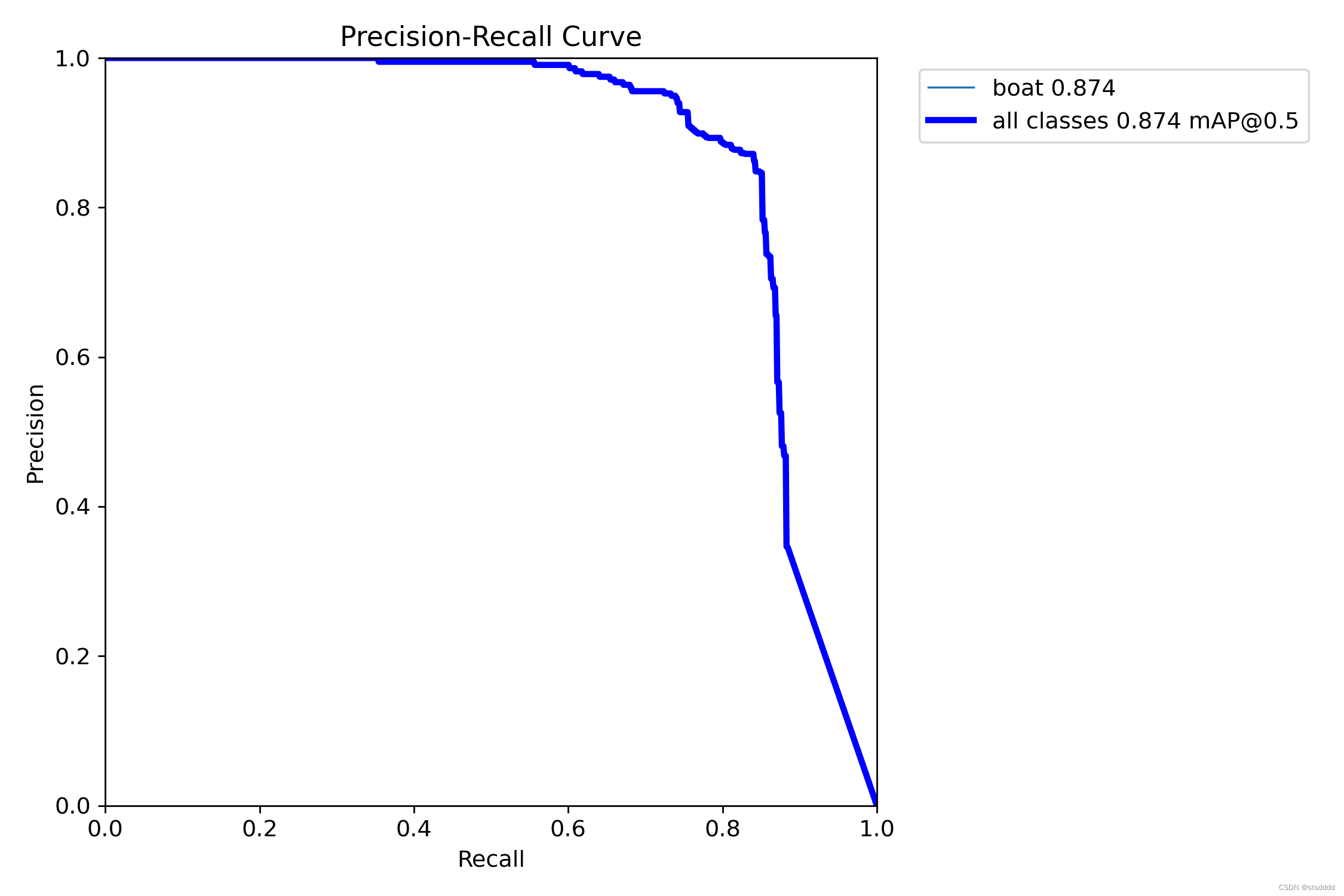
模型评估:在模型训练完成后,我们需要对模型的性能进行评估。这可以通过计算模型在测试数据集上的准确率、召回率、F1分数等指标来实现。如果模型的性能不满足要求,我们可以尝试调整模型的参数或者使用更复杂的模型结构来进行优化。
-
应用部署:当模型的性能达到预期后,我们可以将其部署到实际的应用中。例如,在卫星遥感图像分析系统中,我们可以使用训练好的YOLOv6模型来实时检测舰船目标,并将检测结果用于后续的任务,如舰船跟踪、类型识别等。
总之,通过使用YOLOv6算法,我们可以有效地实现俯视视角下的舰船目标检测。这对于提高海洋监控、海上搜救等任务的效率和准确性具有重要意义。
yolo版本对比:
在俯视视角下进行舰船目标检测时,YOLOv3、YOLOv5、YOLOv6、YOLOv7和YOLOv8各有其特点和优势。
- YOLOv3:作为早期的经典模型,YOLOv3在速度和准确性之间取得了良好的平衡,但在处理小目标检测和密集目标场景时可能会有所不足。
- YOLOv5:YOLOv5在实时应用中表现出色,具有较高的FPS(每秒帧数),特别是在版本’n’上,使其成为实时应用的首选。YOLOv5经过高度优化,非常适用于实时应用。
- YOLOv6:虽然在比较中没有提及YOLOv6的详细信息,但可以推测它可能在YOLOv5的基础上进行了一些改进,以提高性能和准确性。
- YOLOv7:YOLOv7在模型的性能上有所提升,可能采用了更新的网络架构和训练技术,以提高检测的准确性和速度。
- YOLOv8:YOLOv8是最新的模型,它在COCO数据集上取得了较高的平均精度,表现出对小物体检测的优越性能,并解决了YOLOv5的一些限制。YOLOv8包含五个模型,从最快最小的YOLOv8 Nano到最准确但最慢的YOLOv8x,提供了不同应用场景下的多种选择。此外,YOLOv8在CPU上的FPS虽低于YOLOv5,但在某些GPU上的FPS高于YOLOv5,且其’n’版本适用于嵌入式设备,如Jetson Nano。
总的来说,如果需要较快的检测速度,尤其是在资源受限的环境下,可以考虑使用YOLOv5或YOLOv8的某些版本。对于更高的检测精度,尤其是对小目标的检测,YOLOv8可能是更好的选择。
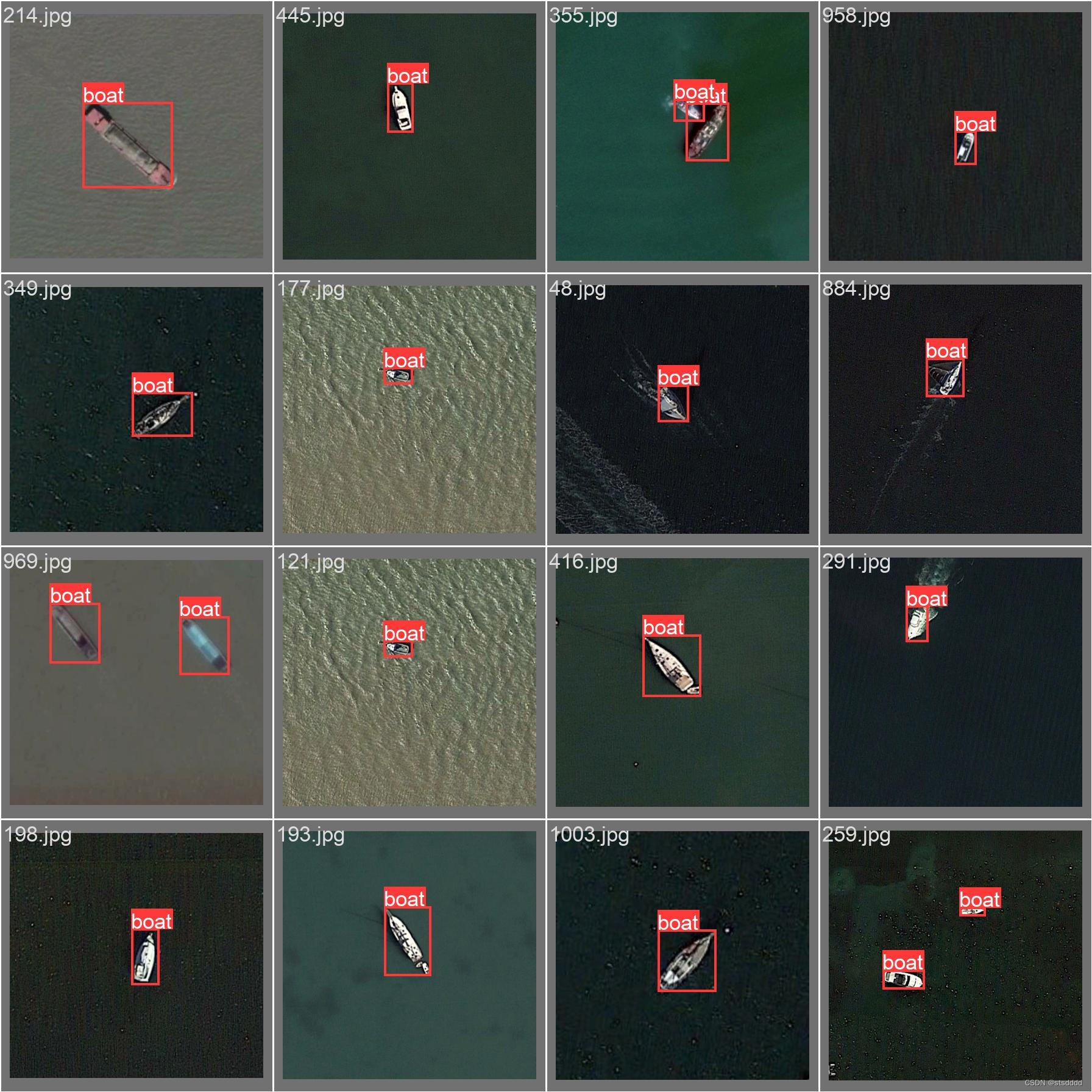
YOLO系列算法俯视视角下舰船目标检测可视化结果