参考博客:
(1) 史上最全的launch的解析来啦,木有之一欧
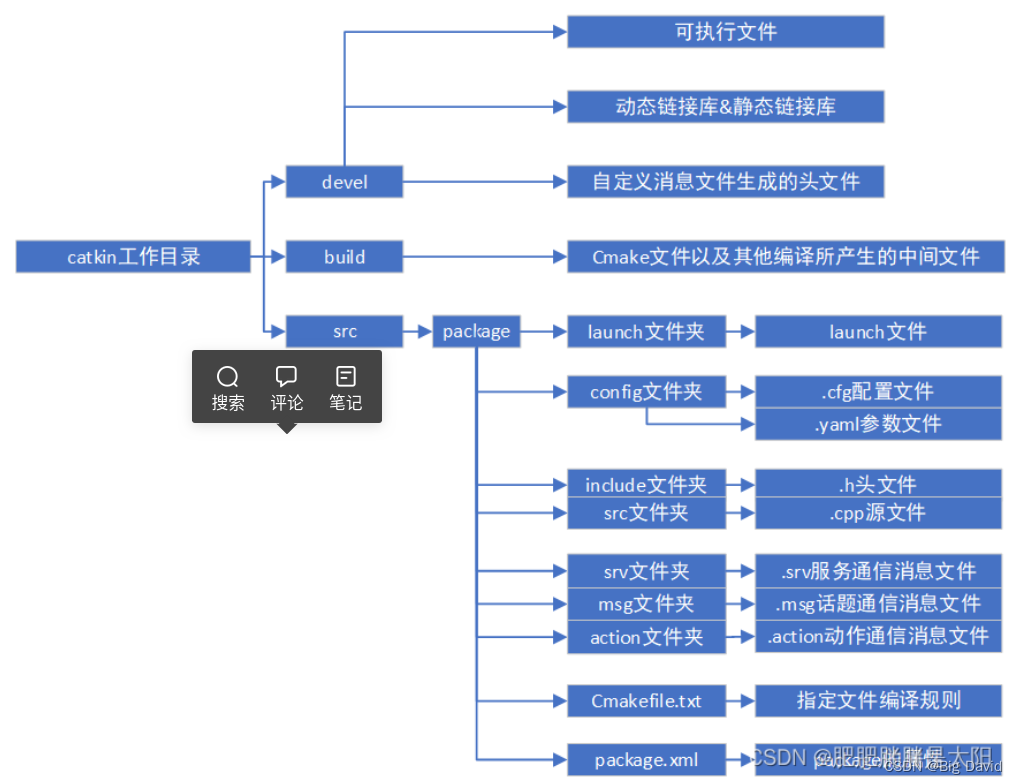
1 ROS工作空间简介
2 元功能包
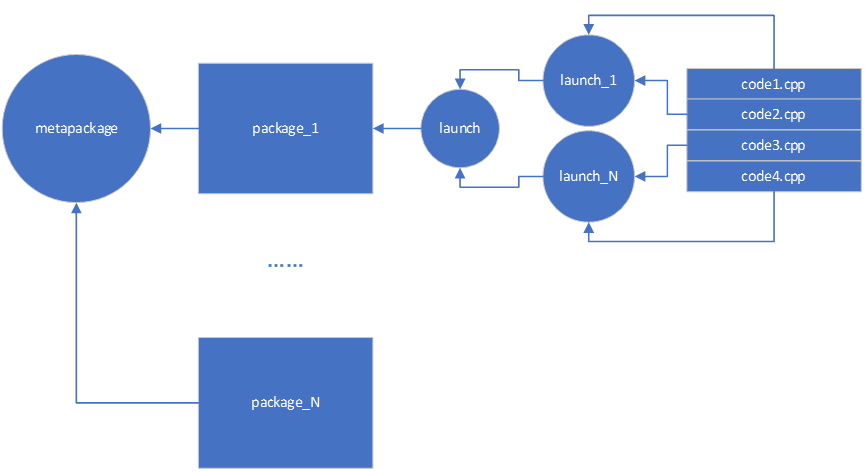
src目录下可以包含多个功能包,假设需要使用机器人导航模块,但是这个模块中包含着地图、定位、路径规划等不同的功能包,它们的逻辑关系如下:

在Linux系统中为了更方便的组织工程项目(这里针对的是项目文件,即功能包),出现了“元功能包”的概念。这个是一个“虚包”,就是这个功能包的src目录下没有源文件,因此自身不会实现专属功能,其功能的实现完全依赖于其他的功能包,起到一个组织功能包的作用。
以导航模块中的元功能包为例:
 navigation功能包为元功能包(metapackage),元功能包中由于没有src目录因此无需添加任何依赖项,因为这个功能包没有自己的专属功能,它的功能是借助其他的功能包的功能来实现的。元功能包有两个文件即可:一个是package.xml文件:用于声明元功能包所依赖的其他功能包;另一个是CMakelist.txt文件:用于指定功能包之间的依赖关系。
navigation功能包为元功能包(metapackage),元功能包中由于没有src目录因此无需添加任何依赖项,因为这个功能包没有自己的专属功能,它的功能是借助其他的功能包的功能来实现的。元功能包有两个文件即可:一个是package.xml文件:用于声明元功能包所依赖的其他功能包;另一个是CMakelist.txt文件:用于指定功能包之间的依赖关系。
CMakelist.txt
cmake_minimum_required(VERSION 3.0.2)
project(navigation)
find_package(catkin REQUIRED)
catkin_metapackage() // 只需添加此条内容即可
package.xml
<exec_depend>amcl</exec_depend>
<exec_depend>base_local_planner</exec_depend>
<exec_depend>carrot_planner</exec_depend>
<exec_depend>clear_costmap_recovery</exec_depend>
<exec_depend>costmap_2d</exec_depend>
<exec_depend>dwa_local_planner</exec_depend>
<exec_depend>fake_localization</exec_depend>
<exec_depend>global_planner</exec_depend>
<exec_depend>map_server</exec_depend>
<exec_depend>move_base</exec_depend>
<exec_depend>move_base_msgs</exec_depend>
<exec_depend>move_slow_and_clear</exec_depend>
<exec_depend>navfn</exec_depend>
<exec_depend>nav_core</exec_depend>
<exec_depend>rotate_recovery</exec_depend>
<exec_depend>voxel_grid</exec_depend> <export> <metapackage/> // 表征:这个功能包为元功能包
</export>
3 Launch文件
Launch文件:源文件的组织者
① 节点启动标签
<launch> <node pkg = "turtlesim" type = "turtlesim_node" name = "my_node"/> <node pkg = "turtlesim" type = "turtle_teleop_key" name = "my_key"/>
</launch>
Tip:因为ROS中采用多线程,因此节点的运行不会按照节点在launch中排列顺序进行。
pkg:功能包的名称
type:节点本来的名称,这个名称和节点所在.cpp源文件的文件名一致
name:节点重映射的名称,相当于在系统中给节点所在源文件改了个名字
launch标签有一个子级标签deprecated,用于文本说明:
<launch deprecated="this vision is out-of-date!">
</launch>
如果认为给很多节点取名太麻烦,可以使用name=”$(anon node_name)”标签在节点node_name名称之后加一些随机数,使得该节点名称在整个catkin编译项目中唯一:
<launch deprecated="this vision is out-of-date!"> <!-- the topic of turtlesim_node is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtlesim_node" name="$(anon my_node)"/> <!-- the topic of turtle_teleop_key is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/>
</launch>
意外关闭后自动启动的子级标签
respawn = true|false 表示:如果节点意外关闭是否重新启动
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" respawn="true"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" respawn="true"/>
</launch>
节点延迟启动的子级标签,一般结合节点重启动是使能标签respawn(如果节点异常退出运行,那么该节点会被重新启动)一起使用
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" respawn="true" respawn_delay="10"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" respawn="true" respawn_delay="10"/>
</launch>
如果XXX节点结束运行(XXX节点被杀死),则所有节点都停止运行
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" required="true"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" />
</launch>
给节点名称添加前缀(给节点添加命名空间)的子级标签
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" ns="hello"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key"/>
</launch>
② 参数设置标签
设置global全局参数
<launch><param name="var" type="int" value="10"/>
</launch>
结合标签设置带有命名空间的私有参数
<launch><node pkg="turtlesim" type="turtlesim_node" name="my_node"/><node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"><param name="var1" type="int" value="20"/></node>
</launch>
③ 参数打包输入输出删除的标签
从.yaml文件中读取参数:
<launch><rosparam command="load" file="$(find test01)/launch/params.yaml"/><node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <param name="var" type="int" value="10"/>
</launch>
将.yaml参数文件中的参数导入参数服务器时,我们还可以给这些参数添加namespace命名空间:
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <param name="var" type="int" value="10"/> <rosparam command="load" file="$(find test01)/launch/params.yaml" ns="hello"/>
</launch>
将参数打包输入进.yaml文件中,这样做啥变量都没导进去:
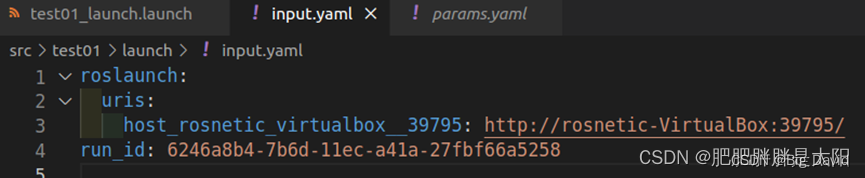
<launch> <rosparam command="dump" file="$(find test01)/launch/input.yaml"/> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <param name="var" type="int" value="10"/>
</launch>
我们要想导入参数必须另建一个.launch文件,在使用上述launch文件启动完所有节点之后,在另一个launch文件中执行该功能包参数的导出操作:
<launch><rosparam command="dump" file="$(find test01)/launch/input.yaml" />
</launch>
<launch> <rosparam command="dump" file="$(find test01)/launch/input.yaml"/> <rosparam command="delete" param="/hello/n1"/>
</launch>
④ 参数统一管理的标签
<launch> <arg name="car_width" default="[1,2,3,4]" doc="the width of car"/> <rosparam param="a_list">$(arg car_width)</rosparam> <rosparam> Name: a: 9 b: "hello" c: $(arg car_width) </rosparam>
</launch>
⑤ 改topic名称的标签
<launch> <!-- the topic of turtlesim_node is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <remap from="/turtle1/cmd_vel" to="new_topic"/>
</launch>
⑥ 节点组织标签
就是给被<group>…</group>包含的所有参数、节点的属性加上了namespace
<launch deprecated="this vision is out-of-date!"> <group ns="family"> <!-- the topic of turtlesim_node is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <!-- the topic of turtle_teleop_key is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <rosparam command="load" file="$(find test01)/launch/params.yaml" ns="hello"/> <arg name="car_width" default="[1,2,3,4]" doc="the width of car"/> <rosparam param="a_list" value="$(arg car_width)"/> <rosparam> Name: a: 9 b: "hello" c: [1,2,3,4] </rosparam> <param name="var" type="int" value="$(arg car_width)"/> </group>
</launch>
⑦ 启动其他launch文件的标签
<launch> <include file="$(find test01)/launch/test01_launch.launch"> <arg name="car_width" default="10"/> </include>
</launch>
4 功能包/源文件/launch文件组织工具
 文件组织形式如下所示:
文件组织形式如下所示:
5 功能包绝对路径替换标签
标签格式:$(find package_name)
使用示例:
<launch> <include file="$(find tf2_turtle)/launch/setupGUI.launch"/>
</launch>
6 工作空间下绝对路径替换标签
下面是test1.launch调用setupGUI.launch文件的代码,并且两个launch文件在一个文件夹之中:
<launch> <include file="$(dirname)/setupGUI.launch"/>
</launch>
$(dirname)代表“test1.launch文件所在工作空间的绝对地址
7 Launch文件
列出几个Launch文件自测一下学习成果
<?xml version="1.0"?>
<launch><!-- 加载车模型 --><include file="$(find vehicle_description)/launch/estima_black.launch" /><!-- --><node pkg="car_simulation" type="car_model_node" name="car_simulation" output="screen" />
</launch>
<launch><include file="$(find global_routing)/launch/global_routing.launch"/><!-- 车辆仿真 --><include file="$(find car_simulation)/launch/car_simulation.launch" /><!-- rviz --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find global_routing)/config/planning_demo.rviz"/>
</launch>
<?xml version="1.0"?>
<launch><!-- 其他launch文件传入的参数 --><arg name="is_planner"/><arg name="is_lateral_optimization"/><arg name="is_change_lane"/><arg name="is_carla_simulation"/><arg name="ego_vehicle_name"/><arg name="is_parking"/><arg name="is_goal"/><!-- 模拟动态障碍物的加载文件,这些都是录好的轨迹点,播放这个文件就可以实现障碍物移动 --><param name="obstacle_test_path" value="$(find dynamic_routing)/obstacle_files"/><!-- 加载存储的其他参考线数据 --><param name="referenceline_path" value="$(find dynamic_routing)/other_referenceline_files"/><!-- yaml文件 --><param name="yaml_path" value="$(find dynamic_routing)/config"/><!-- 规划算法选择 --><param name="use_what_planner" value="$(arg is_planner)"/><!-- 变道决策是否开启 --><param name="change_lane" value="$(arg is_change_lane)"/><!-- 是否使用二次规划,选择了lattice规划,选择这个才有效果 --><param name="use_lateral_optimization" value="$(arg is_lateral_optimization)"/><!-- 是否选择carla联合仿真 --><param name="carla_simulation" value="$(arg is_carla_simulation)"/><!-- role_name --><param name="role_name" value="$(arg ego_vehicle_name)"/><!-- carla 停车场景 --><param name="parking_mode" value="$(arg is_parking)"/><!-- 在frenet规划下的参数设置,lattice规划不用这些 --><!-- COLLISION_CHECK_THRESHOLD 距离障碍物的最短距离 --><param name="COLLISION_CHECK_THRESHOLD" type="double" value="2" /><!-- 调整轨迹的长度 --><param name="MaxT" type="double" value="11" /><param name="MinT" type="double" value="9" /><!-- 判断与终点的停车距离阈值 --><param name="goal_distanse" type="double" value="$(arg is_goal)"/><!-- 打开 Hybrid_a_star 的测试图 --><!-- mapserver提供了一个ROS节点,该节点通过一个ROS Service来提供地图数据 --><node name="map_server" pkg="map_server" type="map_server" args="$(find dynamic_routing)/maps/map.yaml" ><param name="frame_id" value="map" /></node><!--Open palnner的launch参数,顺便加载dynamic节点 --><include file="$(find dynamic_routing)/launch/op_common_params.launch" /><!-- DWA --><arg name="dwa_params" default="$(find dynamic_routing)/config/dwa_params.yaml"/><rosparam command="load" file="$(arg dwa_params)"/>
</launch>
<?xml version="1.0"?>
<launch><!-- 是否使用carla联合仿真 --><arg name="carla" default="false"/> <arg name="ego_vehicle_name" default="ego_vehicle"/> <param name="carla_simulation" value="$(arg carla)"/><param name="role_name" value="$(arg ego_vehicle_name)"/><!-- 不能改这里的参数 --><arg name="parking" default="false"/><param name="parking_mode" value="$(arg parking)"/><!-- ros单独仿真下的controller,carla不适用: 1 stanley 2 lqr 3 pure_pursuit4 pid 5 mpc --><arg name="control" value="2"/> <param name="use_what_controller" value="$(arg control)"/><!-- planner: 1是纯frenet规划2是lattice规划3是em_palnner规划4是混合A*规划5是op_planner规划6是DWA规划7是Teb规划8是simple_em(EM的简化版本,待更新)--><arg name="planner" value="7"/> <param name="use_what_planner" value="$(arg planner)"/><!-- 是否使用二次规划,选择了lattice规划,选择这个才有效果 --><!-- false:lattice 采样规划,true:lattice 二次规划 --><arg name="use_lateral_optimization" default="false"/> <!-- 是否开启变道决策,变道选择的是Lattce采样规划,其他方法不使用 --><arg name="change_lane" default="false"/> <!-- 参考线平滑的方式选择: true:CosThetaSmoother false:FemPosSmooth--><arg name="which_smoother" default="false"/> <param name="which_smoothers" value="$(arg which_smoother)"/><!-- 判断与终点的停车距离阈值 --><arg name="goal_dis" value="0.5"/> <param name="goal_distanse" type="double" value="$(arg goal_dis)"/><!-- 局部规划 --><include file="$(find dynamic_routing)/launch/dynamic_routing.launch" ><arg name="is_planner" value="$(arg planner)" /><arg name="is_lateral_optimization" value="$(arg use_lateral_optimization)" /><arg name="is_change_lane" value="$(arg change_lane)" /><arg name="is_carla_simulation" value="$(arg carla)" /><arg name="ego_vehicle_name" value="$(arg ego_vehicle_name)" /><arg name="is_parking" value="$(arg parking)"/><arg name="is_goal" value="$(arg goal_dis)"/></include><!-- carla联合仿真下的控制方法和参数 --><!-- LQR_dynamics LQR_kinematics Stanley PurePursuit --><param name="control_method" value='LQR_kinematics'/> <!-- "PurePursuit"增益系数 --><param name="k_pure" type="double" value="0.3" /> <!-- "Stanley"增益系数 --><param name="k_cte" type="double" value="100" /> <param name="kp" value="0.5" /><param name="ki" type="double" value="0.02" /><param name="kd" type="double" value="0.05" /><!-- LQR Q R矩阵参数 --><param name="Q_ed" type="double" value="20.0" /><param name="Q_ed_dot" type="double" value="1.0" /><param name="Q_ephi" type="double" value="10.0" /><param name="Q_ephi_dot" type="double" value="1.0" /><param name="R_value" type="double" value="40.0" /><!-- --><param name="Q_ex_k" type="double" value="3.0" /><param name="Q_ed_k" type="double" value="3.0" /><param name="Q_ephi_k" type="double" value="1.5" /><param name="R_value_k" type="double" value="4.0" /><!-- 全局规划 --><node pkg="global_routing" type="global_routing_node" name="global_routing" output="screen" /></launch>


![[HackMyVM]靶场 VivifyTech](https://img-blog.csdnimg.cn/direct/9fbab679ea2a40b9ad5b12cbfabec2e4.png)