一、引言
在当今的机器人技术领域,人类对机器人的需求日益增长,涉及到工业生产、医疗护理、服务业等各个领域。然而,由于任务的多样性和复杂性,单独依靠自主机器人操作往往难以满足实际需求。为了解决这一问题,人机协作成为了一个备受关注的研究方向,即通过人类与机器人之间的合作来完成任务。在这个背景下,研究人员不断尝试开发出更具智能、灵活的灵巧手来实现更高效的人机协作。灵巧手作为机器人的重要组成部分,其灵活性、精准度和智能化水平直接影响着机器人的实际运用效果。然而,传统的灵巧手往往存在着一些局限性,例如缺乏对复杂环境的适应能力、易伤人或目标等问题。
近期北京航空航天大学的文力教授与孙富春教授和方斌教授合作,在Soft Robotics发表工作,提出一种更具拟人化特征的可变胞和刚度的软体灵巧手,以满足不同场景下的需求。文章提出了一种可行的运动映射方法,以改善灵巧手远程操作中对人手刚度负载的识别。由低成本商业sEMG(表面肌电)传感器和数据手套组成的多传感器感知系统(MSS)被利用来将与人手自由度,手势和硬度相关的信息映射到软机器人手上。这使得软机器人手能够生成多样的拟人构型,并通过改变掌构型,可以实现更广泛的对象抓握能力。
二、新型软体灵巧手设计

图1 灵巧手结构
2.1 灵巧手设计
针对传统灵巧手存在的问题,研究人员提出了一种全新的软体灵巧手设计。如图一所示该设计主要包括四段分段加热气动手指和一个变胞手掌,旨在使机器手能够更灵活地适应不同的任务和操作场景。这种软体灵巧手的设计灵感来源于人类的手部结构,通过模仿人手的运动方式,实现了更加自然和高效的操纵。软体灵巧手的手指由多个关键组件构成,其中包括硅橡胶部件、可变有效长度(VEL)变刚度材料层和加热层。这些组件的结合使得灵巧手具备了可调硬度和变形的能力,从而可以更好地适应不同的抓握场景。此外,软体灵巧手还采用了分段加热气动手指的设计,通过对不同部位加热,实现了手指硬度的可调节,从而增强了抓握的稳定性和灵活性。
变刚度材料层由形状记忆聚合物(SMP)组成,可以在加热的情况下改变手指的硬度,从而实现不同硬度条件下的握持任务。加热层采用了Ni-Cr合金材料,可以通过控制加热电路的电流来实现手指的加局部刚度变化。我通过3D打印技术和激光切割技术,制造了手指的样机,并进行了实验验证。
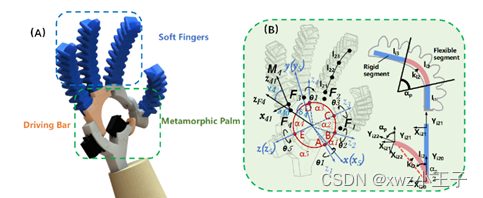
图2 灵巧手运动学模型
变胞掌采用了球面五连杆几何变形机构的设计,可以实现复杂的手部动作。掌通过调整各个关节的角度,可以实现不同的手部动作,如握持、放松和张开。利用数学模型对变胞掌的运动学进行了分析,并设计了相应的运动学模型和控制算法,如图二所示,软体灵巧手有17个关节,这些关节的角度可以根据使用的人机接口进行实时调整提出的人机接口允许用户在实时控制模式下直接与机器人进行交互。
2.2 运动映射方法的提出
文章提出的人机接口允许用户在实时控制模式下直接与机器人进行交互。如图三所示,用户戴上可穿戴设备(如数据手套和sEMG传感器),通过使用电极放置在他们的手臂上来识别人手的姿态。这些电极记录了用户的肌肉活动,并将其转换为变胞掌上的特定关节驱动器的输入角度。这种实时运动映射方法使用户能够将他们的手指运动与机器人手的相应动作直接联系起来,从而实现人机协作。此外,用户还可以通过手势识别功能选择不同的预定义手部动作,而无需手动调整每个关节的驱动器。这种直观的交互方式使得机器人操纵变得更加容易,从而提高了操作效率。
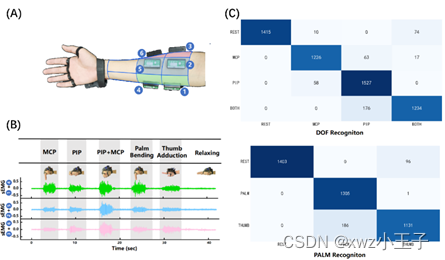
图3 sEMG传感器佩戴位置及传感信号
三、实验验证与分析
为了验证新型软体灵巧手的性能和效果,研究人员进行了一系列实验。其中包括软体灵巧手在不同刚度条件下的抓握能力测试、变胞掌实现复杂手部动作的效果验证以及人机交互实验等。
3.1 抓握能力测试
实验结果显示,在最高硬度设置下,能够提供约25N的最大拔出力,这表明了其在不同硬度条件下的稳定性和可靠性。此外,通过拉伸力实验测试,研究人员还验证了软体灵巧手在不同条件下的抓握能力,结果表明使用可变刚度材料克服了软体抓手抓持力不足的缺点。
3.2 变胞手掌的效果验证
研究人员实现了一系列复杂的手部动作。通过调整各个关节的角度,灵巧手可以实现握持、放松和张开等不同的手部动作,实现基于Feix 分类法的30种动作,如图四所示,从而增强了机器人手的操作灵活性和适应能力。
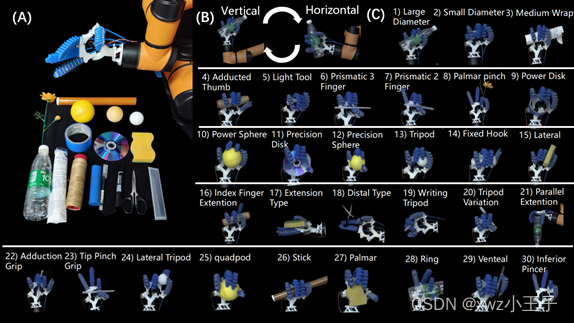
图4 灵巧手抓取实验
3.3 人机交互实验
为了验证人机交互的效果,研究人员设计了一系列人机交互实验,如操作手机,移动积木和咽拭子采集实验。实验结果表明,通过肌电信号直接控制灵巧手的运动,可以实现更直观和高效的操作方式,从而提高了人机协作的效率和准确性。

图4 灵巧手操作实验
四、总结
通过对新型软体灵巧手的设计、实验验证和结果分析,可以得出以下结论:新型软机器人手设计具有良好的稳定性和灵活性,能够适应不同的任务和操作场景。而基于人体信号作为控制信号源实现多自由度和变刚度的灵巧手映射控制,构建了更为直观且友好的人机交互范式,有利于未来探索更多的人机交互方式,以实现更智能、更灵活的机器人操纵。