一、namelist.wps文件
文件位置:Build_WRF/WPS
WPS模块有主要的三大程序geogrid.exe、ungrib.exe、metgrid.exe,namelist.wps文件是输入到这三大程序的配置文件。
namelist.wps文件一共包括四个部分:share, geogrid, ungrib和metgrid。
每个主要程序都有一个独立的配置模块(分别命名为“&geogrid”、“&ungrib”、“&metgrid”,这些模块以“/”分隔),并且三个程序配置模块共有一个共享模块(名为“&share”)供每个程序读取。
&share
- share 部分为一些基础信息。
&sharewrf_core = 'ARW', # WRF核心max_dom = 2, # 嵌套层数start_date = '2020-07-27_00:00:00','2020-07-27_00:00:00', # 模拟事件的开始时间end_date = '2020-07-27_18:00:00','2020-07-27_18:00:00', # 模拟事件的结束时间interval_seconds = 21600 # 初始场数据的间隔时间(单位为s)io_form_geogrid = 2, # geogrid输出文件格式(默认为2,表示netcdf)
/&geogrid
- geogrid部分是嵌套地理信息,包括经纬度、格点数、投影方式等,其中有些数据是需要根据嵌套层数来进行修改和添加的。
关于这部分的理解,可以参照下图:
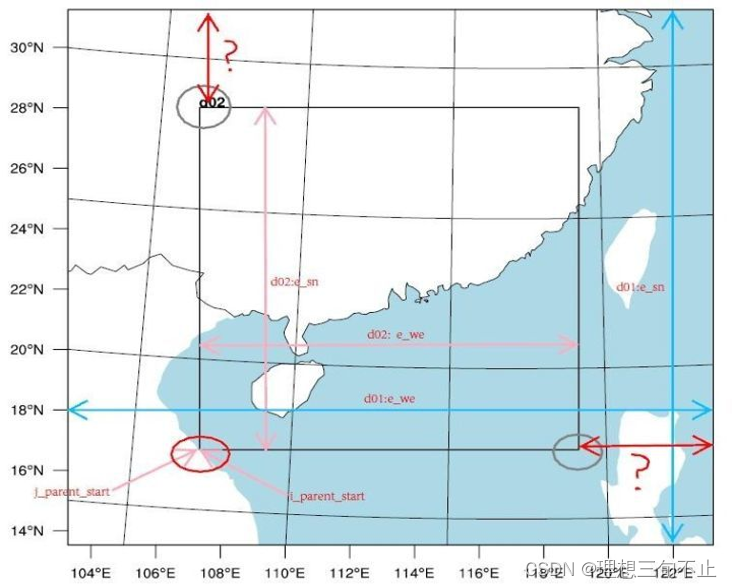
d02:e_we=(d01:e_we - d02:i_parent_start - d02:i_parent_end)*d02:parent_grid_ratio +1
d01: ,d02:表示模拟域对应的值。i_parent_end可根据需要进行设置,即图中?所表示的宽度。
eg:想设置 D02 和 D01 左侧的距离为 50, 右侧的距离为 50,那么 d02:e_we = (241 - 50 - 50)*3 + 1 = 424,当然也可以设置左侧距离为30,右侧距离为 20, 那么 d02:e_we = (241 - 30 - 20)*3 + 1 = 574。
Tips:每个模拟域之间的网格数不要小于5
&geogridparent_id = 1, 1, # 母区域ID,如第一层的母区域是它自己,即为1,第二层母区域为第一层,则也为1,第三层母区域为第二层,则为2parent_grid_ratio = 1, 3, # 每一层区域之间的格距比例i_parent_start = 1, 31, # 每一层在上一层中x方向的起始格点j_parent_start = 1, 17, # 每一层在上一层中y方向的起始格点e_we = 74, 112, # 每一层x方向的总格点数e_sn = 61, 97, # 每一层y方向的总格点数!!!!!!!!!!!!!!!!!!!!!!!!!!!!! IMPORTANT NOTE !!!!!!!!!!!!!!!!!!!!!!!!!!!!! The default datasets used to produce the MAXSNOALB and ALBEDO12M! fields have changed in WPS v4.0. These fields are now interpolated! from MODIS-based datasets.
# 用于生成MAXSNOALB和ALBEDO12M的默认数据集字段在WPS v4.0中发生了变化。这些字段现在是从基于modis的数据集中插值出来的。!! To match the output given by the default namelist.wps in WPS v3.9.1,! the following setting for geog_data_res may be used:
# 为了匹配默认名称列表给出的输出。wps v3.9.1中的wps,geog_data_res可以使用以下设置:!! geog_data_res = 'maxsnowalb_ncep+albedo_ncep+default', 'maxsnowalb_ncep+albedo_ncep+default', !!!!!!!!!!!!!!!!!!!!!!!!!!!!! IMPORTANT NOTE !!!!!!!!!!!!!!!!!!!!!!!!!!!!!geog_data_res = 'default','default', # 地形数据精度dx = 30000, # 最外层X方向网格格距,单位 KMdy = 30000, # 最外层Y方向网格格距,单位 KMmap_proj = 'lambert', # 投影方式ref_lat = 34.83, # 最外层模拟域中心纬度ref_lon = -81.03, # 最外层模拟域中心经度truelat1 = 30.0, # lambert 投影的第一个真实纬度truelat2 = 60.0, # lambert 投影的第二个真实纬度stand_lon = -98.0, # lambert 投影和Y轴平行的经度geog_data_path = '/home/ubuntu/Build_WRF/WPS_GEOG/'
/&ungrib
- ungrib部分是从grib文件中提取模式所需气象场数据,并写入中间格式文件,该部分为中间文件的格式和文件路径和前缀,可不修改。
&ungribout_format = 'WPS', # 输出格式prefix = 'FILE', # 前缀
/
&metgrid
- metgrid是将ungrib提取的气象场数据水平插值到geogrid定义的模拟域中。io_form_metgrid与io_form_geogrid一样,但是metgrid输出文件格式,默认为2,表示netcdf。metgrid部分一般不需要修改。
&metgridfg_name = 'FILE'io_form_metgrid = 2,
/二、namelist.input文件
文件位置:/Build_WRF/WRF/run
namelist.input包括三个部分:&time_control,&domain,&physics
&time_control
&time_controlrun_days = 0,run_hours = 12,run_minutes = 0,run_seconds = 0,start_year = 2000, 2000, 2000,start_month = 01, 01, 01,start_day = 24, 24, 24,start_hour = 12, 12, 12,end_year = 2000, 2000, 2000,end_month = 01, 01, 01,end_day = 25, 25, 25,end_hour = 12, 12, 12,interval_seconds = 21600 #同 namelist.wps中的interval——secondinput_from_file = .true.,.true.,.true.,history_interval = 180, 60, 60, #结果文件输出频率,每个区域一列,单位为minframes_per_outfile = 1000, 1000, 1000, #每个结果文件中保存多少时次的数据restart = .false., #是否重启运行restart_interval = 7200, #输出重启文件的间隔 io_form_history = 2io_form_restart = 2io_form_input = 2io_form_boundary = 2/&domains,与namelist.wps中设置要一致
&domainstime_step = 180, #模型集成的时间步长,以秒为单位time_step_fract_num = 0,time_step_fract_den = 1,max_dom = 1,e_we = 74, 112, 94,e_sn = 61, 97, 91,e_vert = 33, 33, 33,p_top_requested = 5000,num_metgrid_levels = 32,num_metgrid_soil_levels = 4,dx = 30000, 10000, 3333.33,dy = 30000, 10000, 3333.33,grid_id = 1, 2, 3,parent_id = 0, 1, 2,i_parent_start = 1, 31, 30,j_parent_start = 1, 17, 30,parent_grid_ratio = 1, 3, 3,parent_time_step_ratio = 1, 3, 3,feedback = 1,smooth_option = 0/&physics
- Microphysics (mp) scheme每个区域必须一致,但cumulus (cu) schemes各个区域可以不同;不同的组合结果可能不同,但也可能一些组合模式无法运行,需要多多尝试;
&physicsphysics_suite = 'CONUS'mp_physics = -1, -1, -1, # [微物理]cu_physics = -1, -1, 0, # [积云方案]ra_lw_physics = -1, -1, -1, # [长波辐射]ra_sw_physics = -1, -1, -1, # [短波辐射]bl_pbl_physics = -1, -1, -1, # [边界层]sf_sfclay_physics = -1, -1, -1, # [Surface layer]sf_surface_physics = -1, -1, -1, # [Surface]radt = 30, 30, 30, # [辐射时间步长; min]bldt = 0, 0, 0, # [边界层时间步长; min]cudt = 5, 5, 5, # [c积云时间步长; min]icloud = 1,num_land_cat = 21,sf_urban_physics = 0, 0, 0,/&other
&fdda/&dynamicshybrid_opt = 2, w_damping = 0,diff_opt = 1, 1, 1,km_opt = 4, 4, 4,diff_6th_opt = 0, 0, 0,diff_6th_factor = 0.12, 0.12, 0.12,base_temp = 290.damp_opt = 3,zdamp = 5000., 5000., 5000.,dampcoef = 0.2, 0.2, 0.2khdif = 0, 0, 0,kvdif = 0, 0, 0,non_hydrostatic = .true., .true., .true.,moist_adv_opt = 1, 1, 1, scalar_adv_opt = 1, 1, 1, gwd_opt = 1,/&bdy_controlspec_bdy_width = 5,specified = .true./&grib2/&namelist_quiltnio_tasks_per_group = 0,nio_groups = 1,/参考资料
1.WRF 模式模拟流程_wrf模拟-CSDN博客WRF模式模拟流程包括WPS前处理、geogrid.exe确定模拟区域、wrf.exe执行模拟和后处理。模拟域确定和数据预处理是前处理的关键步骤。wrf.exe执行模拟并生成结果文件,时间取决于模拟区域大小和模拟时长。最后根据结果进行后处理和画图。https://blog.csdn.net/weixin_52841591/article/details/129634004