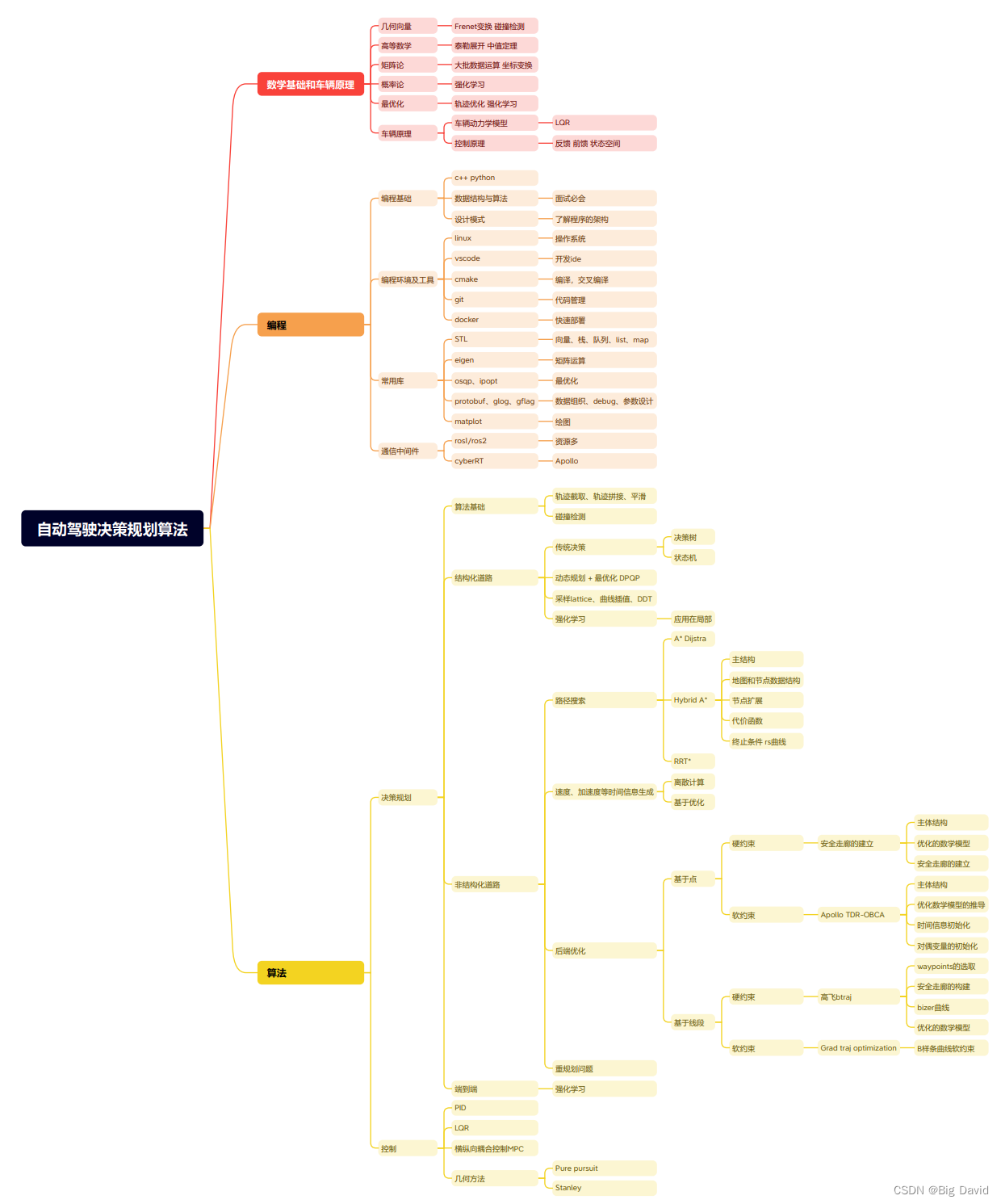
总目录
Frenet与Cartesian坐标系
Apollo基础 - Frenet坐标系
车辆模型
车辆运动学和动力学模型
控制算法
PID控制器轨迹跟随实现
Pure Pursuit控制器路径跟随
路径跟踪算法Stanley 实现 c++
无人驾驶LQR控制算法 c++ 实现
MPC自动驾驶横向控制算法实现 c++
双环PID控制详细讲解
规划算法
A*算法原理及C++实现
Dijstra算法原理及C++实现
蚁群算法实现 - 全局路径规划算法
全局路径规划算法 - 动态规划算法Python实现
局部路径规划算法 - 多项式曲线法
局部路径规划算法 - 人工势场法
局部路径规划算法 - 贝塞尔曲线法 C++ matlab
局部路径规划算法 - B样条曲线(B-spline Curves)
规划控制系列的理论基础
规划系列的常见术语:龙格现象、控制点、型值点和插值点、规划控制的开环、闭环、前馈、反馈与重规划
参考线平滑 - FemPosDeviation算法
Apollo决策规划 - EM planner
运动规划之参数曲线
移动机器人规划 - 概述
Pnc面临的挑战
决策规划框架 - (解耦:路径规划和速度规划 | 耦合:行为规划和轨迹规划)
基于优化的规划方法 - 数值优化基础 Frenet和笛卡尔的转换 问题建模 实现基于QP的路径优化算法
基于车辆运动学的规划算法 - Hybrid A*/ State Lattice Planning (前置知识:自行车模型、Dubins、Reeds Shepp、多项式曲线、螺旋曲线)
基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT
基于图搜索的自动驾驶规划算法 - BFS,Dijstra,A*
规划基础知识
Linux CAN通信(一)
Linux CAN通信(二)
常用库
CppAD安装和Ipopt安装(亲测有用!!!)
CppAD优化问题求解
osqp-eigen学习
OSQP文档学习
Eigen c++库
C++ matplotlib 画图 Linux
ROS
Launch学习
ROS之rviz显示(visualization_msgs/Marker)
基于ROS发布里程计信息
仿真工具
Carla自动驾驶模拟器安装和使用
Linux基础
Linux常用文件和目录管理
tmux和vim
shell语法大全(超级详细!!!!),非常适合入门
CMake简明教程
Cmake入门基础
数据结构与算法(面试必会)
LeetCode hot100
LeetCode 热题 100 (尽量ACM模式刷) 持续更新!!!
C++基础
C++基础从0到1入门编程(一)
C++基础从0到1入门编程(二)
C++基础从0到1入门编程(三)
C++基础从0到1入门编程(四)类和对象
C++基础从0到1入门编程(五)使用类-(友元、运算符重载、转换函数)
C++基础从0到1入门编程(六)- 类继承、类多态
论文阅读
百度Apollo开放平台基于二次优化的最优车辆路径规划
EM planner 论文阅读
一种具有轨迹优化的无人驾驶车实时运动规划器 论文阅读
自动驾驶车辆运动规划方法综述 - 论文阅读
无人驾驶汽车运动规划方法研究综述 - 阅读笔记
用于自动驾驶最优间距选择和速度规划的多配置二次规划(MPQP) 论文阅读
Frenet坐标系下动态街道场景的最优轨迹生成
HybridA* 论文解读