相位解缠是InSAR数据处理流程中较为关键的步骤,同时也是地表高程模型重建 过程中的主要误差来源之一。迄今为止,针对干涉图的相位解缠问题,已经提出了各 种各样的相位解缠算法,这些算法大致可以分为以下几类:①路径跟踪法;②最小范 数法;③基于非线性滤波的最优状态估计法。
近年来,基于非线性滤波的状态估计算法相继被提出,并受到越来越多的关注。 状态估计算法利用干涉图相邻像元相位之间的约束关系,构建干涉相位的状态空间方 程与观测方程,将干涉图相位展开问题转化为贝叶斯理论框架下的状态估计问题。 2008 年 Loffeld 等[35]首次将扩展卡尔曼滤波算法应用于干涉图相位解缠中,通过构建 干涉相位的系统方程,将干涉图相位解缠问题演变为状态估计问题,为缠绕干涉图相 位解缠提供新的算法思路。2011 年谢先明[36][37]把无味卡尔曼滤波(UKF)算法与传 统路径跟踪策略以及基于二维快速傅里叶变换(FFT)的局部相位梯度估计算法结合 起来,提出了基于无味卡尔曼滤波的相位解缠算法,并在实测干涉图解缠实验中获得 稳健的结果,极大促进了非线性滤波算法在干涉图相位解缠中的应用。2014 年谢先 明[38]研究了基于修正矩阵束模型(Amended Matrix Pencil Model, AMPM)的相位梯度 估计算法以及基于快速堆排序的质量图引导算法,并将其与非线性滤波算法相结合, 极大地扩展了基于非线性滤波的相位解缠算法。2015 年刘万利[39]探讨了容积卡尔曼 滤波相位解缠方法相关问题研究。近几年,谢先明等[40] [41][42][43][44][45]又相继提出了许 多种类的非线性滤波相位解缠算法,均能取得较好的解缠结果。Rahul G Waghmar 等 人[46][47][48]提出了基于扩展状态变量维数相位解缠算法,这些方法将幅度、相位以及 梯度信息作为一个整体变量进行递推估计,主要有扩维卡尔曼滤波算法以及扩维粒子 滤波算法等,在噪声较低的干涉图中都能够快速且较好地得到一个令人满意的解缠结 果。V. Katkovnik 等人[49][50]提出了运用局部多项式系数估计的相位解缠算法,随后 2018 年 R.Kulkarni 和 P.Rastogi 提出了一系列在局部窗口内估计多项式系数的相位解缠算 法[51][52],在噪声较低的干涉图中能够获得较好的结果。此外高延东等人[53][54]提出了 基于自适应卡尔曼滤波的相位解缠算法以及基于无味卡尔曼滤波的两阶段编程多基 线 SAR 干涉图相位展开算法,进一步拓展了非线性滤波算法。2020 年谢先明、孙玉 铮等[55] [69]提出基于容积卡尔曼局部多项式递推估计的相位解缠算法以及一种容积信 息滤波局部迭代相位解缠算法,这两种方法在局部窗口内利用 CKFPU 或者 CIFPU 算 法对多项式系数进行迭代估计,能够获得更加精确的解缠相位值。通常这些非线性滤 波方法能在相位解缠的同时实现干涉相位噪声抑制处理,能够较为准确地从含噪干涉 图中获取解缠相位,具有较强的稳健性。然而,干涉图噪声的存在及相位解缠精度依然是获取数字高程模型的主要误差来源,随着现代干涉测量技术应用的发展,对干涉 图相位解缠的精度要求越来越高,这就要求寻找和探索提高干涉图相位展开精度的新 途径和新方法。
无味卡尔曼滤波相位解缠算法
UKFPU 算法以无味变换(Unscented Transform,UT)为核心,在平均值周围选 取一组最小的采样点(称为 sigma 点), 以便这些点准确地捕获先前随机变量的平均 值和协方差。本节介绍无味卡尔曼滤波与修正矩阵束模型梯度估计算法(Amended Matrix Pencil Model, AMPM)以及最大堆排序路径跟踪策略相结合的相位解缠算法 (UKFPU)。
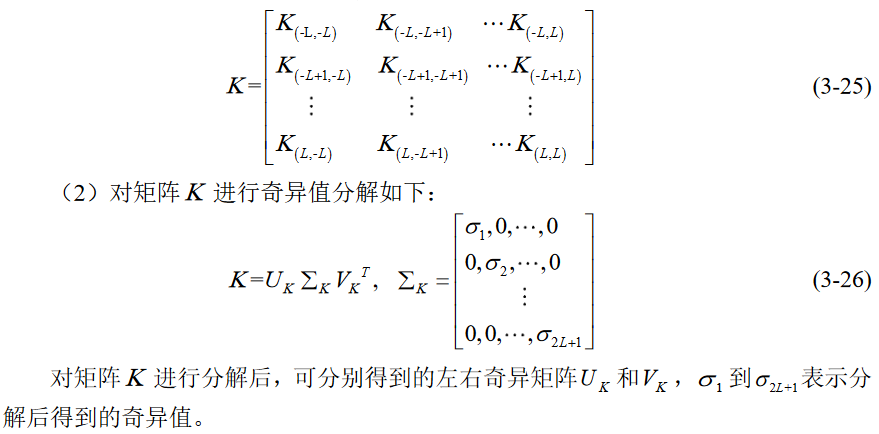
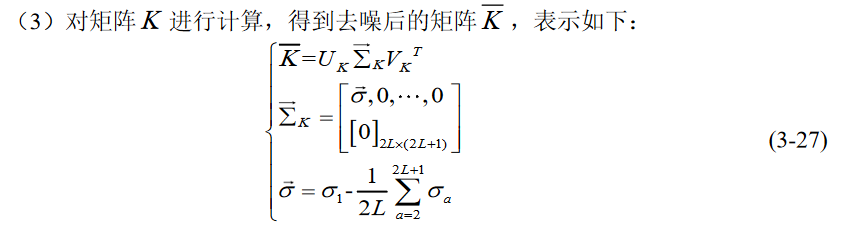
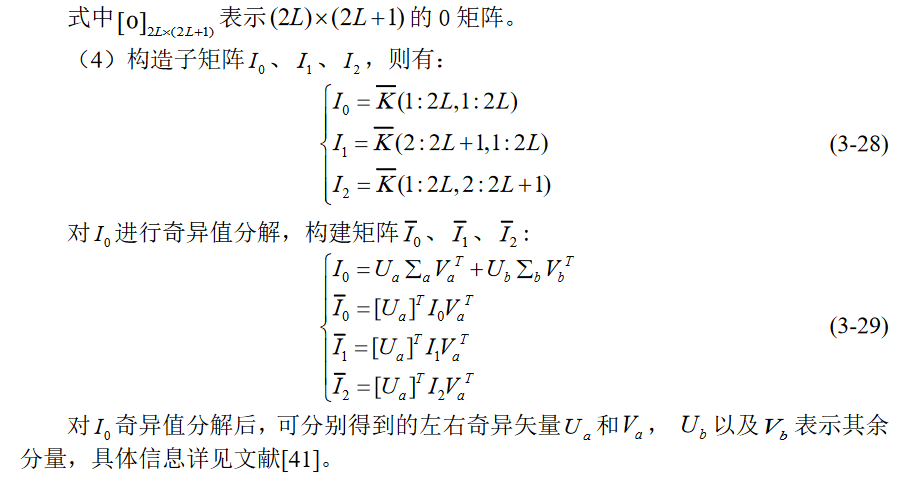
(一)基于修正矩阵束模型的局部相位梯度估计[41]算法 复干涉相位图经过归一化处理后,在像元 ( ) , mn 处的复干涉信号可以表示为:


参考文献:基于卡尔曼滤波的干涉图相位解缠算法研究 徐有邈