0. 简介
将SLAM应用于机器人应用中,可靠性和效率是两个最受重视的特性。本文《Light-LOAM: A Lightweight LiDAR Odometry and Mapping based on Graph-Matching》考虑在计算能力有限的平台上实现可靠的基于激光雷达的SLAM功能。首先与大多数选择点云配准的显著特征的方法相反,我们提出了一种非显著特征选择策略,以提高可靠性和鲁棒性。然后使用两阶段对应选择方法来配准点云,其中包括基于KD树的粗匹配,然后是一种基于图的匹配方法,它使用几何一致性来排除不正确的对应关系。此外提出了一种里程计方法,其中权重优化是由前述的几何一致性图的投票结果引导的。通过这种方式,激光雷达里程计的优化迅速收敛,评估出一个相当准确的变换结果,从而使后端模块能够高效完成地图任务。相关的代码已经在github上开源了。
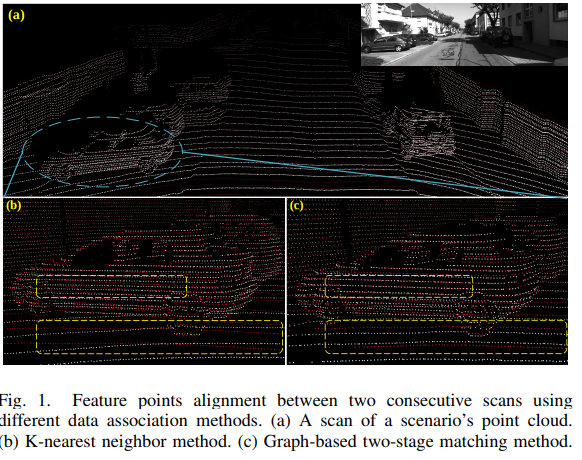
图1.不同数据关联方法在两个连续扫描之间的特征点对齐。(a) 某种情景的点云扫描。(b) K最近邻方法。© 基于图形的两阶段匹配方法。
1. 主要贡献
在本文中,我们考虑在计算能力有限的机器人平台上实现可靠的基于LiDAR的SLAM功能。贡献主要有:
-
首先是开发了一种创新的SLAM前端,包括一个非显眼的特征选择策略和一个基于图形的特征匹配函数,以实现更好的点云配准。
-
其次,为了从前端的可靠配准中受益,我们开发了一个轻量级的后端,可以在计算能力有限的平台上更高效地执行。我们使用公共数据集和自行收集的数据进行实验验证。
2. 系统概述
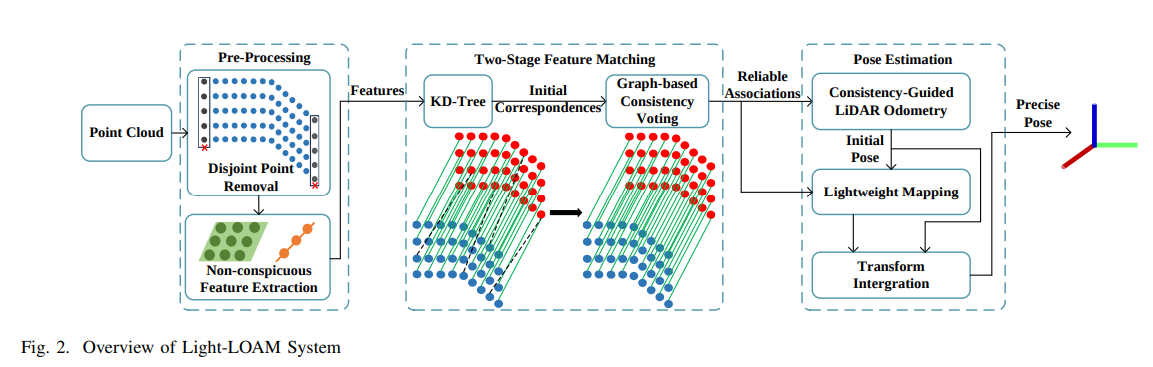
我们在图2中展示了我们的Light-LOAM SLAM系统的流程,它由三个核心阶段组成:预处理、两阶段特征匹配和姿态估计。
在预处理阶段,我们首先从每个点云扫描中过滤出不连续的点。为了选择具有微妙局部几何属性的稳定角点和平面特征,我们采用了一种不显眼的选择方法,并过滤掉最显著的角点和平面特征。这是与其他方法[1]、[2]、[5]的一个主要区别。然后进行两阶段的特征匹配过程。在第一阶段,我们采用基于KD树的方法[1]来建立所选特征的初始对应关系。然后,我们引入了基于图的一致性投票机制来评估这些对应关系,有效地过滤掉不可靠的关联。在前端里程计模块中,可靠点对的一致性得分被利用来优化变换,从而得到初始的相对精确的姿态估计。最后,在这些初始可靠的估计的支持下,映射模块以更高效的方式优化更准确的姿态。
3. 特征提取与选择
3.1 不相交点去除
由于3D LiDAR传感器产生的大量数据,特征提取和基于特征的对齐是一种广泛采用的方法,用于高效评估变换。然而,在提取特征候选之前,消除不相交的物体是至关重要的。不相交点通常表示离群值或遮挡物体的片段,它们的包含会严重降低后续特征关联和姿态估计的质量。因此,与之前的工作[16]一致,我们采用以下标准来排除这些不连续的点:

其中, p i k p^k_i pik表示位于第 k k k个激光束通道中的第 i i i个点, σ d i s j o i n t σ_{disjoint} σdisjoint作为判断阈值。如果一个点与其两侧邻居的欧氏距离的绝对差超过 σ d i s j o i n t σ_{disjoint} σdisjoint,则被分类为不连续点。否则,它被视为连续候选点。在消除不连续对象后,我们从每个激光束通道中提取特征点。点的局部几何属性使用平滑度度量(2)进行描述。