第一次更新:2024/5/4
目录
整体概述
混频器(MIXER)
低通滤波器(LPF:Low-Pass filter)
数模转换器(ADC:Analog to Digital Converter)
毫米波雷达功能框图
整体概述
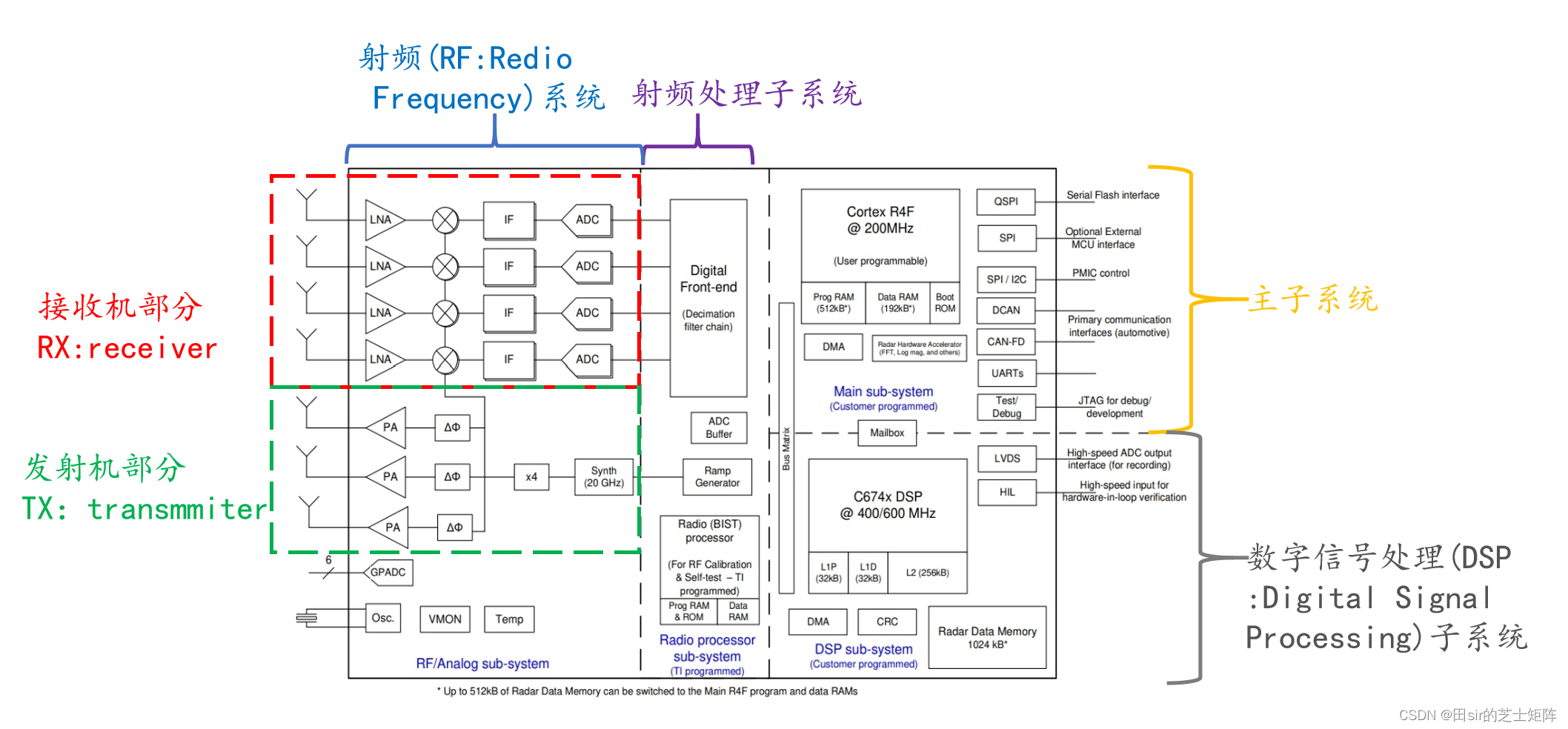
完整的毫米波雷达系统包含:发送(TX:Transmit)、接收(RX:Receive)以及射频(RF :Radio Frequency)等模拟组件;数字信号处理(ADC:Analog to Digital Converter)、微控制单元(MCU:Microcontroller unit)以及数字信号处理(DSP:Digital signal processing)等数字组件。在信号与数据处理之前的射频(RF)前端硬件可以分为两部分:发射机部分和接收机部分。重要硬件的基本框架如下:
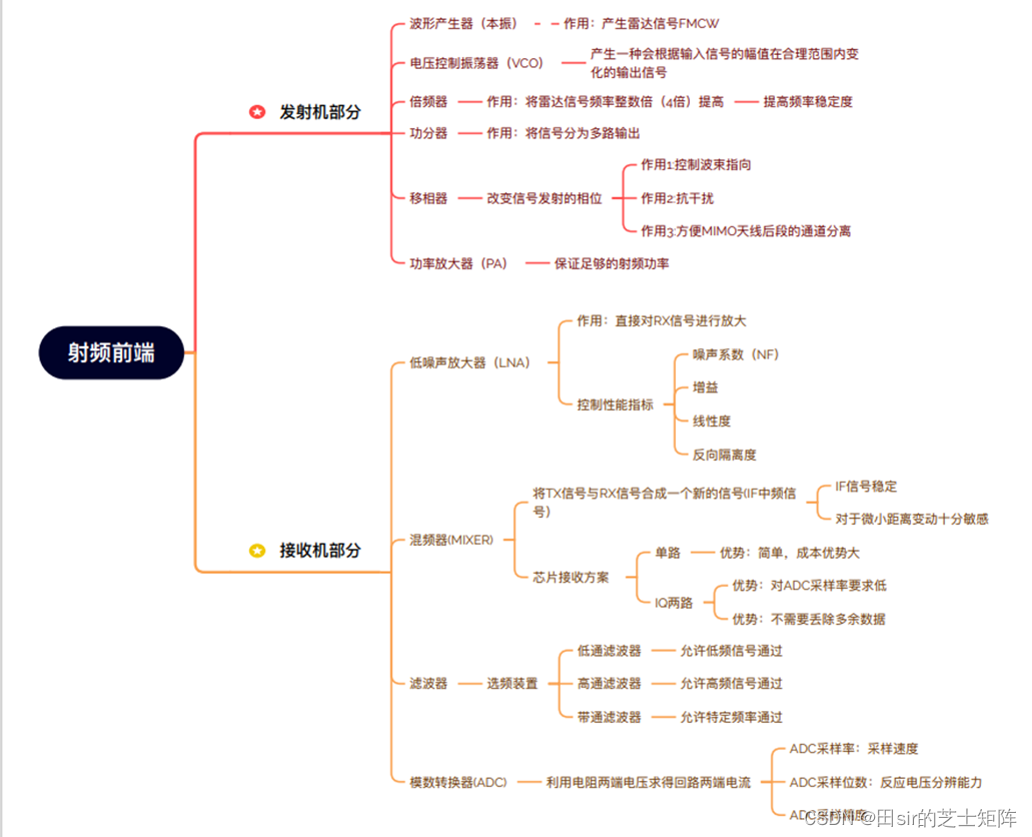
发射机部分:毫米波雷达首先通过信号发生器产生FMCW(Frequency Modulated controlled Wave)信号(基带信号)后,经过多级变频调制处理使得波形信号调制76GHz~77GHz之间,再经PA(Power Amplifier)放大后由TX发射到空间中。
接收机部分:RX接收到反射来的雷达信号后通过LNA(Low Noise Amplifier)及混频处理后得到复基带信号,通过低通滤波以及ADC(Analog to Digital Converter)采样将其转化为离散复基带信号。
是不是看着一大推名词有点懵?不着急,先对硬件处理流程有熟悉一下,接下来我们来详细的看硬件:
混频器(MIXER)
混频器是一个功能性电子器件,其作用是将发射天线(TX:transmitter)及接收天线(RX:receiver)的信号合成一个新的信号,将原来频率较高的两个射频信号转化为一个频率较低的(中频信号IF: Intermidinate frequency)。这样一来混频器输出的IF信号就可以满足频率信号恒定。
那为什么要混频成一个中频信号呢?
- 一方面中频信号具有很多优良特性,比如稳定、对于微小变动十分敏感;
- 另一方面,是便于测量,在低频信号中容易实现比相,继而容易计算物体的角度。
那我们来推导一下混频过程:

我们将发射(TX)天线的信号表示成:
将接收(RX)天线的信号表示成:
则混频后得到的中频(IF)信号为:
在频率时间图像上表现为发射信号与接收信号的差频f

产生的中频信号维持一个恒定的频率:
其中, 为发射信号与接收信号间的时间差,S为线性调频信号的斜率(即上图的直线斜率)。
低通滤波器(LPF:Low-Pass filter)
电感阻止高频信号通过而允许低频信号通过,电容的特性却相反。信号能够通过电感的滤波器、或者通过电容连接到地的滤波器对于低频信号的衰减要比高频信号小,称为低通滤波器(LPF:Low-Pass filter)。
该低通滤波器的作用是让低于转折频率 的低频段信号通过, 而将高于转折频率
的信号去掉。当输入信号Vin中频率低于转折频率
的信号加到电路中时,由于C的容抗很大而无分流作用,所以这一低频信号经R输出。当Vin中频率高于转折频率
时,因C的容抗已很小,故通过R的高频信号由C分流到地而无输出,达到低通的目的。


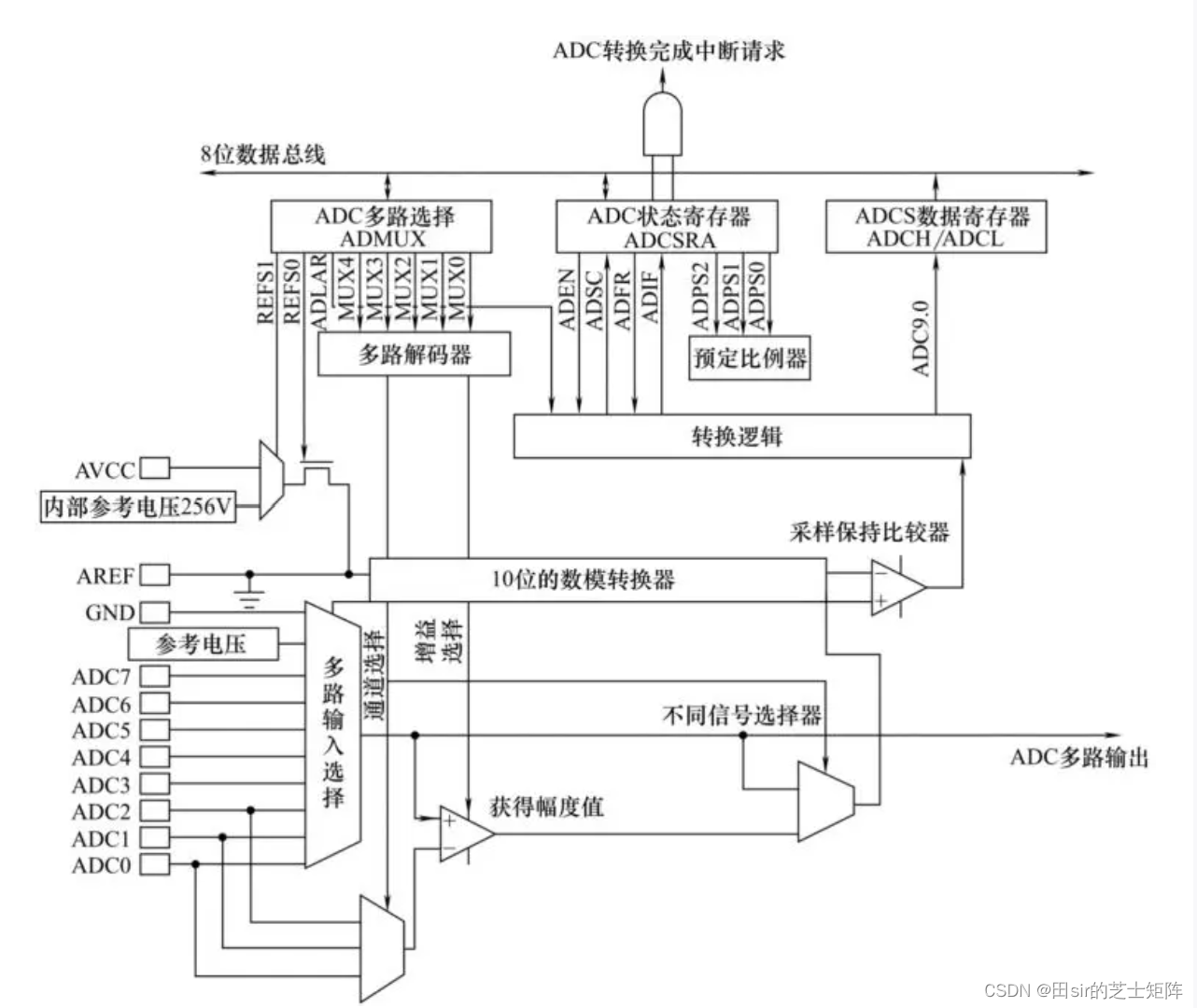
数模转换器(ADC:Analog to Digital Converter)
雷达收集到的物理信号也就是模拟信号需要通过ADC转化为离散的二进制的数字信号,便于计算机做进一步的处理分析。数模转换器是将模拟输入信号转换为以数字信号的形式输出,由于数字信号仅表示一个相对大小,因此每一个数模转换器需要一个参考量作为转换的标准,而输出的数字量则表示输入信号相对参考信号的大小。
数模转换器本质上是一个比例问题:
ADC产生的数字值跟输入模拟量与转换器量程的比值有关,转化系数如下:
其中X是数字输入;N是数字输入的位数(ADC的位数);是模拟输入量的值;
是模拟输入量的最大值。
毫米波雷达功能框图