
1,主计算机:相当于电脑的主机,用于存放系统和数据,需要24V直流电才能工作。执行用户编写的程序,控制机器人进行响应的动作。主计算机有很多接口,比如与编程PC连接的服务网口、用于连接示教器的网口、连接轴计算机板的接口、连接安全面板的接口、不同的现场总线卡接口(比如PRROFIBUS、PROFNET、DeviveNet等)、安全板接口及其它可选接口等。

2,轴计算机板
主计算机发出控制指令后,首先给轴轴计算机板,轴计算机处理后在传递给驱动单元,同时轴计算机板还处理串口测量板SMB传递的分解器信号,接收机器人轴串行测量板(SMB)返回的位置数据,与先前的位置数据进行比较和运算,并输出新的位置和速度控制参数

3,6轴驱动单元
驱动单元将变压器提供的交流电整流成直流电,在将直流电逆变成交流电,驱动电动机

4,串口测量SMB板和电池 电池在控制柜断电的情况下可以保持相关数据,具有断电保持功能,串口测量板可以保存电动机分解器的位置信息进行处理保存

5,系统电源模块
可以将220V交流电转换成24V直流电 ,给主机算计和示教器提供电源输出

6,电源分配板块
可以将系统电源的24V电源分配给各个组件

7, 电容器
充电和放电是电容器的基本功能。 此电容用于机器人关闭电源后,保存数据后再断电,相当于延时断电功能。

8,接触器板
K42 K43 给驱动取提供三项交流电源 K44 给电动机抱闸提供24V电源

9,安全板
用来连接一些安全相关的信号,在正常工作时,其LED灯应全部点亮,安全板控制总停(GS1,GS2),自动停(AS1,AS2),优先停(SS1,SS2)

10,i/O单元模块
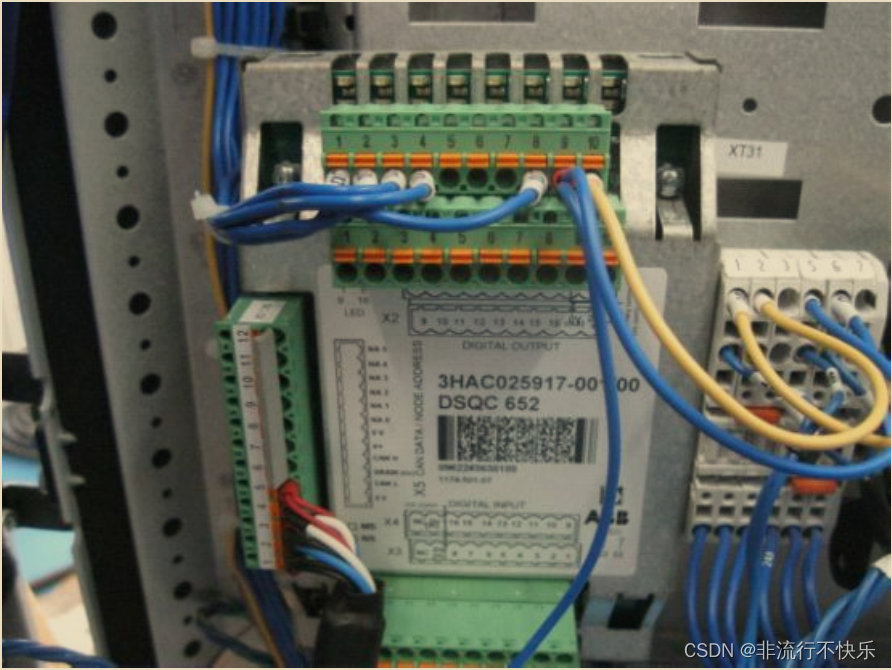
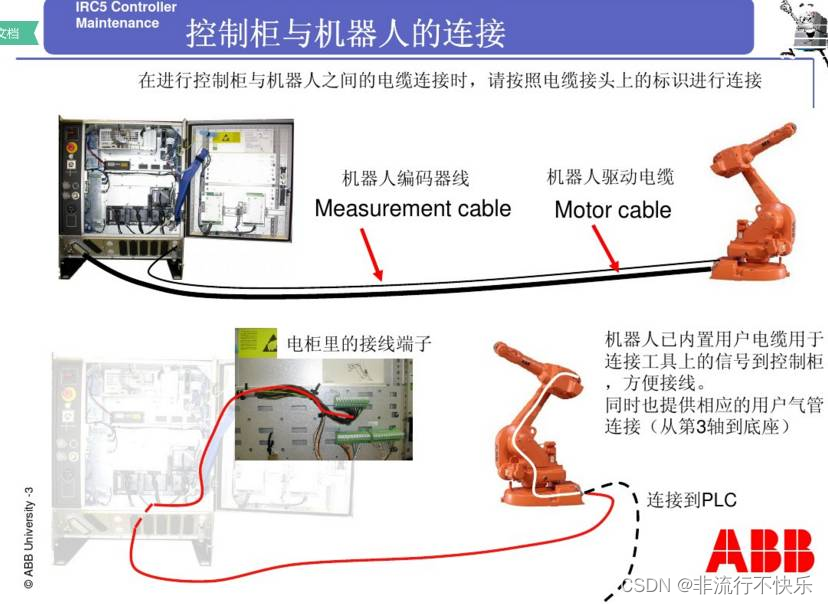
ABB 控制柜
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/336006.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
揭秘网络编程:同步与异步IO模型的实战演练
摘要
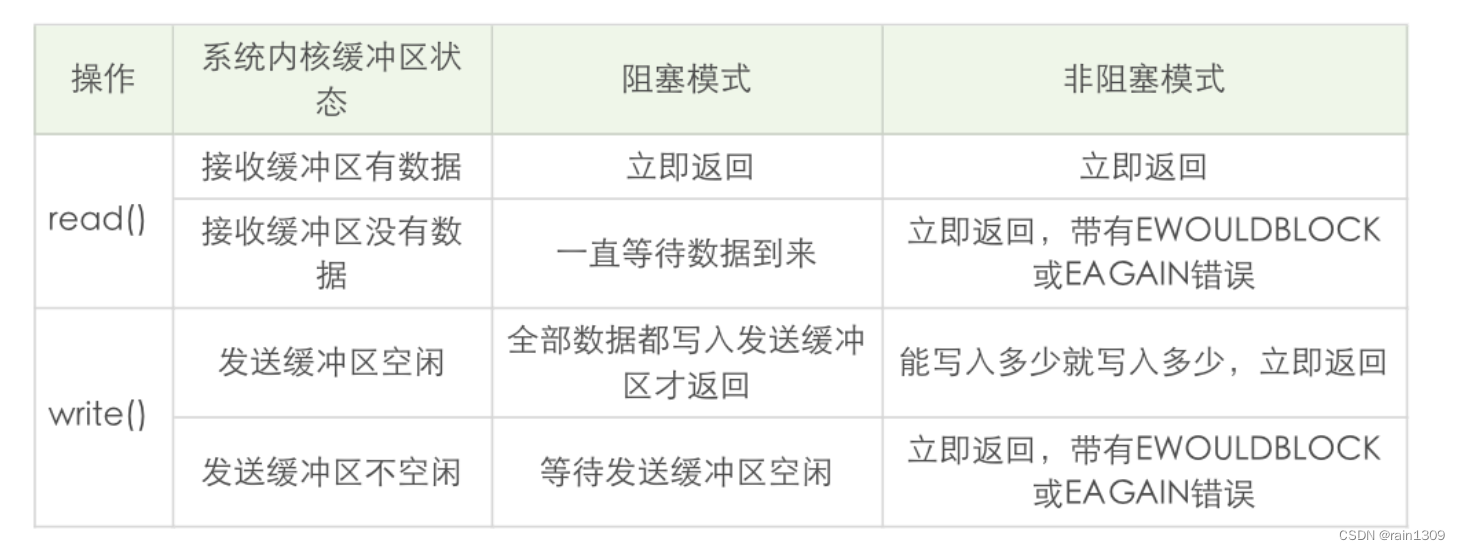
在网络编程领域,同步(Synchronous)、异步(Asynchronous)、阻塞(Blocking)与非阻塞(Non-blocking)IO模型是核心概念。尽管这些概念在多篇文章中被广泛讨论,它们的抽象性使得彻底理解并非易事。本文旨在通过具体的实验案例,将这些抽象…

深入解析Web前端三大主流框架:Angular、React和Vue
Web前端三大主流框架分别是Angular、React和Vue。下面我将为您详细介绍这三大框架的特点和使用指南。
Angular
核心概念: 组件(Components): 组件是Angular应用的构建块,每个组件由一个带有装饰器的类、一个HTML模板、一个CSS样式表组成。组件通过输入(@Input)和输出(…

【Python】解决Python报错:TypeError: %d format: a number is required, not str
🧑 博主简介:阿里巴巴嵌入式技术专家,深耕嵌入式人工智能领域,具备多年的嵌入式硬件产品研发管理经验。 📒 博客介绍:分享嵌入式开发领域的相关知识、经验、思考和感悟,欢迎关注。提供嵌入式方向…
.NET 直连SAP HANA数据库
前言
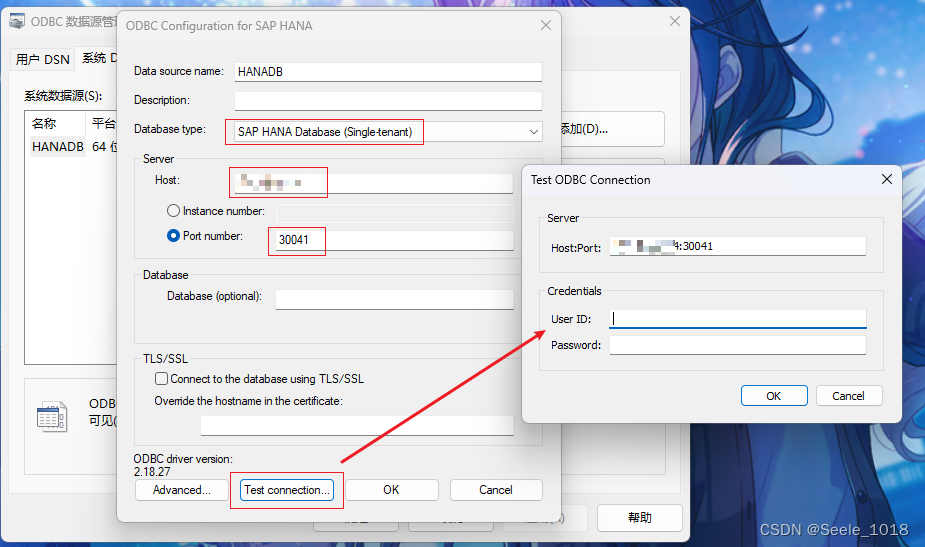
上个项目碰到的需求,IT部门要求直连SAP的HANA数据库,以只读的权限读取SAP部门开发的CDS视图,是个有点复杂的工程,需要从成品一直往前追溯到原材料的产地,和交货单、工单、采购订单有相当程度上的关联 IT部门要求…

会议管理系统(含源码+sql+视频导入教程)
👉文末查看项目功能视频演示获取源码sql脚本视频导入教程视频
1 、功能描述 会议管理系统拥有两种角色
管理员:部门管理、员工管理、会议管理、会议室管理、预订会议、添加员工、注册员工审批等
用户:个人通知中心、预订会议、查看所有会议…

错误记录:从把项目从Tomcat8.5.37转到Tomcat10.1.7
错误信息:在本地Servlet项目里没有报错,但是浏览器跳转该servlet时报错
型 异常报告
消息 实例化Servlet类[com.wangdao.lx.MyServlet1]异常
描述 服务器遇到一个意外的情况,阻止它完成请求。
例外情况
jakarta.servlet.ServletExceptio…

四川汇聚荣聚荣科技有限公司是正规的吗?
在当今社会,随着科技的飞速发展,越来越多的科技公司如雨后春笋般涌现。然而,在这个信息爆炸的时代,如何判断一家公司是否正规成为了许多人关注的焦点。本文将围绕“四川汇聚荣聚荣科技有限公司是否正规”这一问题展开讨论…
Spring框架学习笔记(五):JdbcTemplate 和 声明式事务
基本介绍:通过 Spring 框架可以配置数据源,从而完成对数据表的操作。JdbcTemplate 是 Spring 提供的访问数据库的技术。将 JDBC 的常用操作封装为模板方法
1 JdbcTemplate 使用前需进行如下配置 1.1 在maven项目的pom文件加入以下依赖 <dependencies…

最新区块链论文录用资讯CCF B—DASFAA 2024 共3篇
Conference:International Conference on Database Systems for Advanced Applications (DASFAA)
CCF level:CCF B
Categories:数据库/数据挖掘/内容检索
Year:2024
Conference time:July …
认识K8s集群的声明式资源管理方法
前言
Kubernetes 集群的声明式资源管理方法是当今云原生领域中的核心概念之一,使得容器化应用程序的部署和管理变得更加高效和可靠。本文将认识了解 Kubernetes 中声明式管理的相关理念、实际应用以及优势。
目录
一、管理方法介绍
1. 概述
2. 语法格式
2.1 管…
Qt 配置Eigen矩阵库 - 并简单测试
Qt 配置Eigen矩阵库 - 并简单测试 引言一、在Qt中配置Eigen二、低通Demo源码三、参考链接以及其他 引言 Eigen是一个开源的C模板库,提供了线性代数和矩阵运算的功能。它被设计为一个高性能、可扩展和易用的库,可以用于科学计算、机器学习和计算机图形学等…

dubbo复习:(4) 和springboot 整合时,客户端负载均衡的配置
需要在DubboReference注解指定loadbalance属性。示例如下:
package cn.edu.tju.service;import org.apache.dubbo.config.annotation.DubboReference;
import org.springframework.beans.factory.annotation.Autowired;
import org.springframework.stereotype.Ser…

使用NuScenes数据集生成ROS Bag文件:深度学习与机器人操作的桥梁
在自动驾驶、机器人导航及环境感知的研究中,高质量的数据集是推动算法发展的关键。NuScenes数据集作为一项开源的多模态自动驾驶数据集,提供了丰富的雷达、激光雷达(LiDAR)、摄像头等多种传感器数据,是进行多传感器融合…

Discuz!X3.4论坛网站公安备案号怎样放到网站底部?
Discuz!网站的工信部备案号都知道在后台——全局——站点信息——网站备案信息代码填写,那公安备案号要添加在哪里呢?并没有看到公安备案号填写栏,今天驰网飞飞和你分享
1)工信部备案号和公安备案号统一填写到网站备案…
服务器感染了. rmallox勒索病毒,如何确保数据文件完整恢复?
导言:
近年来,随着信息技术的飞速发展,网络安全问题日益凸显。其中,勒索病毒作为一种严重的网络威胁,对个人和企业数据造成了巨大的威胁。本文将重点介绍.rmallox勒索病毒的特点、传播途径以及应对策略,旨…
压力测试JMeter
压力测试JMeter 1 下载JMeter1.1 测试计划1.2 JMeter Address Already in use 错误解决1.3 java 内存模型1.4 jconsole与jvisualvm1.5 优化方向1.6 Nginx动静分离 1 下载JMeter
官网地址:https://jmeter.apache.org/download_jmeter.cgi 运行apache-jmeter-5.6.3\…
firebase如何自定义上传日志
我们可以很轻松的得到2个代码:
Firebase.crashlytics.log(str)
Firebase.crashlytics.recordException(ex)这就是firebase提供的自定义日志和excption上传的方法。 但是如果你认为log函数调用后,直接就能查看到日志就错了。 我们在这个page是找不到日志…

如何找出真正的交易信号?Anzo Capital昂首资本总结7个
匕首是一种新兴的价格走势形态,虽然不常见,但具有较高的统计可靠性。它通常预示着趋势的持续发展。该模式涉及到同时参考两个不同的时间周期进行交易,一个是短期,另一个是长期,比如一周时间框架与一天时间框架、一天时…

Windows下PostgreSQL数据库的备份与恢复
文章目录 一、备份1.找到PostgreSQL的安装目录下的"bin"目录2.在windows的命令窗口里,使用pg_dump进行备份1.打开命令窗口2.使用pg_dump将数据库备份下来 二、恢复1.找到PostgreSQL的安装目录下的"bin"目录2.在windows的命令窗口里,…
最新文章
- 盘锦做网站专家/百度网盘app下载安装手机版
- 做网站话术/百度网盘客服在线咨询
- 博物馆网站微信公众号建设方案/上海有名网站建站开发公司
- 免费空间已经注册 怎么做网站/seo外包公司是啥
- 网站盈利模式/搜索大全浏览器
- 博客网页制作代码/防疫优化措施
- 大数据技术-Hadoop(二)HDFS的介绍与使用
- jetson 无显示器配置WIFI
- 多语言多商家版线上购物商城/在线客服/商家入驻/代理后台/全开源跨境电子商务系统
- vue3使用element-plus,解决 el-table 多选框,选中后翻页再回来选中失效问题
- 0039__屏幕帧缓冲机制
- 基于Pycharm与数据库的新闻管理系统(3)MongoDB
推荐文章
- 微软认证最新考题70-029 SQL7.0实现
- iPhone 14 Pro 全系降价 700 元;Gmail 之父:有了 ChatGPT,搜索引擎活不过两年了|极客头条
- # Go学习-Day9
- ###C语言程序设计-----C语言学习(11)#数据的存储和基本数据类型
- #力扣:LCP 06. 拿硬币@FDDL
- $MPC 登录MEXC,加速Partisia Blockchain 生态市场进程
- (14)嵌套列表,Xpath路径表达式,XML增删查改,Implicit,Operator,Xml序列化,浅拷贝与深拷贝
- (delphi11最新学习资料) Object Pascal 学习笔记---第10章第6节(关于混合RAD和OOP的15个技巧)
- (docker)mysql镜像拉取-创建容器-容器的使用【个人笔记】
- (第一集)ChatGPT prompt教程 - 让ChatGPT更好用,成为所有人的工作利器
- (蓝桥杯C/C++)——STL(上)
- (论文复现)DeepAnt模型复现及应用