目录
摘要
Abstract
文献阅读:求解正逆运动波问题的物理信息神经网络
文献摘要
讨论|结论
理论基础
KWM(运动波动方程)
Hard constraint (硬约束方式)
具有重新分布的搭配点的PINN
具有停止梯度的分数阶方程
实验设置
正运动学波问题
稳定降雨案例
不稳定降雨情况
逆运动波问题
Fluent实例:分流管道中的流动分析
几何建模
网格划分
求解器设置
结果展示
理论学习部分
总结
摘要
在本周中,通过阅读文献,了解PINN的新形式RCP-PINN,文章中使用传统PINN和RCP-PINN对于3个问题的结果进行对比试验,包括两个正问题和一个逆问题,证明了RCP-PINN在实际运用中的可行性,并阐述了优缺点。在Fluent中,选用内分流管道中的流动分析,进行几何划分和设置求解。理论学习方面,对有luent算法基本知识进行了学习。
Abstract
In this week, I read the literature to learn about the new form of PIN, RCP-PINN, and used the traditional PIN and RCP-PINN to compare the results of 3 questions, including two positive questions and one inverse problem, to prove the feasibility of RCP-PINN in practical application, and to explain the advantages and disadvantages. In Fluent, I use the flow analysis in the inner shunt pipe to do the geometry and setup the solution. In terms of theoretical learning, I learned the basic knowledge of luent algorithms.
文献阅读:求解正逆运动波问题的物理信息神经网络
Physics-informed neural network for solution of forward and inverse kinematic wave problems
文献摘要
一维运动波模型(KWM)广泛应用于地表水和水质水文,以及长公路上的交通运动建模,由于其涉及一个一阶非线性偏微分方程,该方程可以用数值方法求解真实的几何表示、输入、初始条件和边界条件。
文章从此角度,提出了一种利用神经网络结构求解偏微分方程的方法,即使用PINN应用于正、逆问题的一维非线性KWM求解。文章中的创新点如下:
- 为了提高精度和收敛性,抑制陡坡锋面的杂散振荡,采用了一种改进的PINN算法——重分布配点技术(RCP-PINN)。
- 为了处理非线性平流项的分数阶,提出了一种停止梯度技术。
为了验证这一点,文章对正向问题进行了定常、非定常坡面流和无侧流明渠流的KWM分析。对于反问题,正确计算了未知的Manning系数,验证了所提算法辨识KWM参数的能力。
优劣势如下:
- 与原有的PINN相比,它没有增加额外的计算成本;
- 与PINN相比,RCP-PINN预测结果更准确,训练过程中的损失收敛过程更快、更稳定。与经典的SA算法相比,原PINN算法及其修正算法的计算次数要少得多。
- 在没有任何指导的情况下,保留点的数量可能会随着具体问题的变化而变化,这是有限制的。这使得这种方法在一定程度上还依赖于经验和实践。
讨论|结论
KW问题可以分为正解和逆解两类。在正向问题中,已知系统几何形状、输入、初始条件和边界条件,并确定系统输出。例如:在给定初始流深和上游条件下,求解整个时空范围内的水深和流量分布,恢复水力流程图,预测洪波。针对不同的流入和流域条件,已经推导出了各种KWM的解析解、半解析解和近似解。
在反问题中,KW方程的参数是未知的,应该通过给定的初始条件和边界条件以及观测来确定。KW方程中的参数为曼宁系数和平面斜率。坡度可以通过简单的测量直接得到,因此不需要确定。当曼宁系数未知时,其估算对于估算行程时间和排水设计具有实际意义。
目前方法存在的局限在于:
- 在求解正演问题时,这些方法对具有光滑解的问题给出了准确的解,换而言之,在不具有光滑解时,可能在陡锋(激波)处出现数值扩散和/或伪振荡。
- 对于解逆问题,这些方法并不总是令人满意的。
故引出使用PINN来进行求解KW问题的方式,pinn的优势是双重的:
(1)首先,它依赖于自动微分技术,该技术可以轻松实现训练过程,近似解的导数,并在整个解域中获得连续解。
(2)其次,同一个框架既可以用来解决正向问题,也可以用来解决逆向问题,而且实现起来很简单。
但是以往的PINN方式依赖于训练点的数量,点分布的选项包括uniform, LHS, Sobol和其他策略,Sobol策略和LHS一样,也是一种分层抽样,采样域是均匀划分的,每个部分只有一个采样点。与LHS相比,Sobel策略要求采样点的个数为2n(n∈n)。
每种策略的目标都是在整个域内实现或多或少的均匀分布,而不是结合实际问题,而是关注全局属性的泛化。然而,由于具体问题的解空间和性质不同,上述点分布策略很少能获得最优分布和最佳训练效果。
由于初始点和边界点很好地受到其他技术的约束,例如硬约束,。期望的目标是在不增加计算成本(包括空间成本和时间成本)的情况下,通过尽可能优化搭配点的分布来提高原算法的性能。空间成本包括总点数(num_total)和神经网络的大小,时间成本主要是训练epoch (num_epoch),通常以训练epoch的个数作为衡量标准。
在原来的PINN中,不可能计算出每一个KWM案例的训练损失,发现导致这个缺陷的原因有两个:
- 在神经网络中,计算出的分数项对象不应小于零,但在实际训练过程中,目标函数h可能具有负训练值。
- 自动微分技术在反向传播过程中会使分数项出现在分母中。当某些点的水高接近于零时,分数项变得非常大。这就导致当神经网络的参数更新时,它们会超出计算机的数字范围,从而无法计算。文章将采用停止梯度法求解。
如何在兼顾计算成本和精确度的情况下进行求解各种正逆问题,提出了一种配置点重新分布的改进PINN,称为RCP PINN。本文采用Manning方程,上游边界条件为Dirichlet型,下游边界为Neumann型。将其应用于4个KWM正、逆问题,并将RCP-PINN结果与传统方法得到的解析解和参考解进行比较。验证了RCP-PINN算法相对于PINN算法的优越性。
理论基础
KWM(运动波动方程)
运动波动方程是动力波动方程的简化形式,由以下连续性和动量方程组成:

式中,q为单位宽度水量,h为水深,I为侧向入水量,u为水流速度,g为重力加速度,S0为河床斜率,Sf为摩擦斜率。
在(2)式中,局部加速度项(∂u/∂t)、对流加速度项(u×∂u/∂x)、压力梯度项(g×∂h/∂x)和侧向流入力项(uI /h)可以视为次要项,因此可以忽略。因此,摩擦力和重力处于平衡状态,简化后的动量方程为:

Manning和Chezy的方程表示经验放电方程。参照完全湍流时流量与深度的关系,可表示为:

其中nm为Manning系数,Cz为Chezy系数。由简化的动量方程和Manning /Chezy方程推导出通量-浓度方程:

系数:

将连续性方程(1)与通量-浓度方程(6)相结合,可以得到关于水深的非线性方程,有侧向入流的一维坡面流及其初始条件和边界条件的控制方程为:

由于运动波动方程是一阶双曲型偏微分方程,它的解只需要一个边界条件。
在运动学中,波浪由上游向下游运动时,不需要式(12)给出的下游边界条件。然而,一些高阶数值格式,如本文所参考的修正全变分递减Lax - Friedrichs (MTVDLF)方法,即使方程是一阶,也需要下游条件。
Hard constraint (硬约束方式)
硬约束和软约束都可以起到约束初始边界条件的作用,但它们在神经网络中的实现机制不同。软约束主要是增加损失项,并通过迭代优化来达到效果。
硬约束通过转换神经网络的输出在特定条件下工作,包括初始、狄利克雷和周期边界条件。
同时,不再需要loss中相应的初始边界项。与软约束相比,硬约束有两个优点:
- 减少了对计算成本的需求,
- 应用硬约束时显著改善了训练。
然而,硬约束仍然存在局限性。如果边界条件是诺伊曼或罗宾类型,它将是无效的。它可能会导致某些位置的过拟合,从而降低精度,并且它并不适用于所有问题。一般情况下,根据实际问题,可以同时使用软约束和硬约束。
在实际物理意义上,初始边界条件和上游边界条件都是重要的约束条件,因此在这两个条件下应用硬约束是有效的。它的实现将输出h转换为x × t × h,严格保证了x = 0和t = 0处水深为零。在损失函数中不再需要初始和上游边界损失。
具有重新分布的搭配点的PINN
基本的pINN框架如下所示:

首先,对一定数量的训练epoch应用PINN作为预训练。然后,在时域上收集了测试正交网格点GP0 (n × n)的控制方程损失;进一步绘制粒度更粗的网格G1 (N × N)来划分GP0。基于G1中GP0的网格损耗总和,可以数值化地表示出各个网格的损耗分布。最后,根据损失分布的比例,对整个域的并置点进行重新分布。需要注意的是,本文所考虑的问题都是一维的时空问题,所以配点都是二维的。
在高维问题中,网格的尺寸应相应增大。综上所述,改进算法分为三个阶段,分别为预训练阶段、再分配阶段和正式训练阶段。原PINN算法主要用于预训练阶段和正式训练阶段,其中再分配阶段是本文的重点。
根据控制方程损失和保留的思想,多次动态优化点的分配,而不是只改变一次点的分配。再分配阶段的训练被分成多个训练时段,每个训练时段数相同。在每次训练中,根据当时的训练结果重新分配搭配点,直到达到预设的训练时代。通过每次再分配的结果得到最终解,并在多次分配中选择权重递增的形式。随着训练的进行,神经网络的学习情况会逐渐接近精确解。
假设重新分配的次数为R (R > 1),具体到第i次分配点,每个粗粒度网格G1的损失和为L[i] j N×N j=1,其和为L[i],则每个网格中点的损失比例为:

设每个网格中保留的点数为m,则需要重新分配的点数为:

第j个粗网格G1中第i个点分配数的公式为:

其中num[i] j (1 < i < R, i∈_1)如果不是整数,则将其舍入。
根据上述递推公式,最终得到第j个粗网格G1的动态演化点数为:

在每个网格中重新确定训练点的个数,并据此使用LHS对训练点进行重新分配。采用上述再分配搭配点技术的PINN在训练过程中实现了搭配点的动态分配,称为RCP-PINN。算法1描述了RCPPINN的详细过程:

上述技术可以应用于使用PINN求解任何偏微分方程。
具有停止梯度的分数阶方程
停止梯度是一种依赖于神经网络的自动推导机制的技术,在训练中利用链式法则对输出结果进行微分,并利用推导结果更新网络参数。停止梯度允许我们有选择地将某些项作为常数处理,而不需要将它们卷入反向推导。这是在分析了KWM的特点后对神经网络进行的调整。
TensorFlow是本文中使用的深度学习框架,其中在tf.gradients()参数中有一个:stop_gradients函数来实现上述想法。
当这种技术应用于一个变量时,它的梯度不会在TensorFlow图中被评估。一项不返回的梯度不会引起神经网络参数更新误差,只是稍微减慢了参数更新速度。在KWM中,如果算法没有传回h23的梯度,则没有项在分母中变为零。这种方法防止了损失中出现过多的数字,使培训工作顺利进行。请注意,停止梯度技术不仅适用于这里考虑的KWM,也适用于其他分数阶方程,当一个值太大而无法在反向传播过程中表示时。
实验设置
正运动学波问题
考虑了空间均匀分布的稳定和非稳定降雨情况。在无侧流问题中,采用变流量作为上游边界条件。所有算例均采用了具有Superbee限制器的MTVDLF方法,为比较和评价提供参考方案,采用TVD方法
稳定降雨案例
稳定入流情况为长度为1000m、坡度为0.01、曼宁系数为0.02的倾斜矩形平面上的坡面流。降雨速率I为30 cm/h,持续时间为1600 s。对于所有x,初始条件为h = 0。
RCP-PINN的参数为:搭配点个数为10000,边界点个数为100。初始点和边界点的选择策略是一致的。训练过程由Adam优化器执行100,000次,学习率为0.001。G1 (10 × 10)的每个网格中保留的搭配点M为50个。在PINN中,除了选择LHS作为搭配点外,进行了相同的设置。MTVDLF的空间步长Δx为10 m,时间步长Δt为0.1 s。
在图2中,将RCP-PINN的结果与PINN、MTVDLF的结果以及解析解在整个时空域上进行比较。可以清楚地观察到,在0 ~ 2000 s的时间范围内,PINN溶液有较大的振荡,而RCP-PINN溶液更接近解析解。误差在时空域的分布对比如图3所示。RCP-PINN的误差主要集中在比原PINN小得多的区域。
由于重复实验中误差之间的巨大差异,虽然PINN获得了准确的结果,但经验发现,在PINN预测中存在一定的不确定性,这归因于模型的不稳定性。


两种方法的搭配点分布如图4所示,以说明两种方法在训练过程采样中的差异。RCP-PINN的点分布由初始分布(图4a)演变为最终分布(图4b),而图4a中PINN的点分布保持不变。根据RCP-PINN中提出的点选择策略,图4b中的搭配点在控制方程损失较大的位置变得密集,在其他位置变得稀疏。在训练过程中,搭配点的总数保持不变:

图5特别选取x = 500 m和x = 1000 m处的截面结果进行对比。结果表明:
RCP-PINN更精确地逼近了精确解,在抑制伪振荡方面表现更好。MTVDLF结果的峰值略低于精确解,但稳定性优于PINN和RCP-PINN。
为了保证实验的可靠性,检验算法的稳定性,文章重复进行了10次独立实验,PINN和RCP-PINN的相对误差均值分别为0.022和0.016,误差降低了25.5%,进一步验证了算法的有效性:

不稳定降雨情况
样例设置与上述稳流情况相同,非稳态降雨速率I (cm/h)满足下式:

参考解采用三次样条插值(CSMOC)特征法得到,CSMOC的空间步长Δx为100 m,时间步长Δt为150 s, MTVDLF的Δx = 10 m, Δt = 1 s。PINN和RCP-PINN在时域和下游边界处得到的水深结果分别如图6和图7所示:


总体上与参考解和MTVDLF解吻合较好,但在水深趋于最大的位置,PINN的耗散误差较大(图7),通过RCP-PINN中配置点的重新分配,耗散误差得到了很大的改善。MTVDLF溶液的峰值也略低于参考溶液;
从数值误差的角度,将下游端PINN和RCP-PINN的解与参考解进行了比较。与CSMOC相比,PINN和RCP-PINN的计算误差分别为0.016和0.012。这一结果表明准确率提高了28.7%。在稳定性方面,两种方法的标准差分别为0.0052和0.0031,表明RCP-PINN有效避免了较大偶然误差的发生。
图8显示了RCP-PINN和PINN的搭配点选择,其中点被重新分配到梯度变化较大的位置。重新分配的并置点不一定只集中在这些位置:

逆运动波问题
设置与前文相同,需要给出Manning系数的初始训练值,在迭代过程中逐渐接近真实值。假设真实值为0.02,初始训练值为1.0。观测数据取自10 × 10正交网格点。
以经典模拟退火(SA)算法为参考,假设观测数据由MTVDLF给出。SA的参数为:初始温度1.0,结束温度10-6,冷却系数0.9,最大迭代次数20,初始猜测值0.01,最佳代价初始化为无穷大。
表1为PINN、RCP-PINN和SA+MTVDLF对nm的预测结果。实验独立重复了10次,以比较这些算法的稳定性和准确性。在相同训练周期和计算代价的情况下,RCP-PINN在重复训练时的预测结果比PINN更接近真实值,也更稳定。在计算成本方面,SA+MTVDLF大约是PINN和RCP-PINN的50倍:

选择观测点如图10所示:

两种方法在20000个epoch下的训练损失过程如图11所示。可以看出,RCP-PINN的损失收敛到一个较小的值,而PINN的损失波动要大得多。这意味着在固定历元的条件下,与PCR-PINN相比,PINN更有可能停止在一个相对较差的解,训练过程可能不会停止在预期的收敛位置:

Fluent实例:分流管道中的流动分析
几何建模
在XY平面上绘制几何图形,单位调整成为mm,绘制如下图形,具体尺寸见图中:

采用圆角命令,采用圆角的半径为150mm,将拐角处进行圆角操作,再采用50mm的圆角命令,将三角形顶点进行圆角操作:

在YZ平面中新建草图,绘制一个原点的5mm直径圆,右键选择两个草图,选择总是显示的命令,采用扫掠命令,圆为轮廓,线为路径,生成管道:

在创建菜单中采用模式命令,方向采用圆形,轴选用X轴,将会环绕X轴创作,拷贝数为4,生成如下:

网格划分
生成默认网格,可以看出各网格的单元质量都趋近与0.9,故可以考虑该套网格,做完边界条件命名,更新网格后进入Fluent求解器中:

求解器设置
采用层流模型进行求解,添加流体材料为水,边界条件设置如下,若没特别指出,保持默认选择,残差监控设置为1e-6,迭代次数为1000,求解器方法、初始化条件如下所示:



结果展示
残差收敛:

速度云图:

流线图:

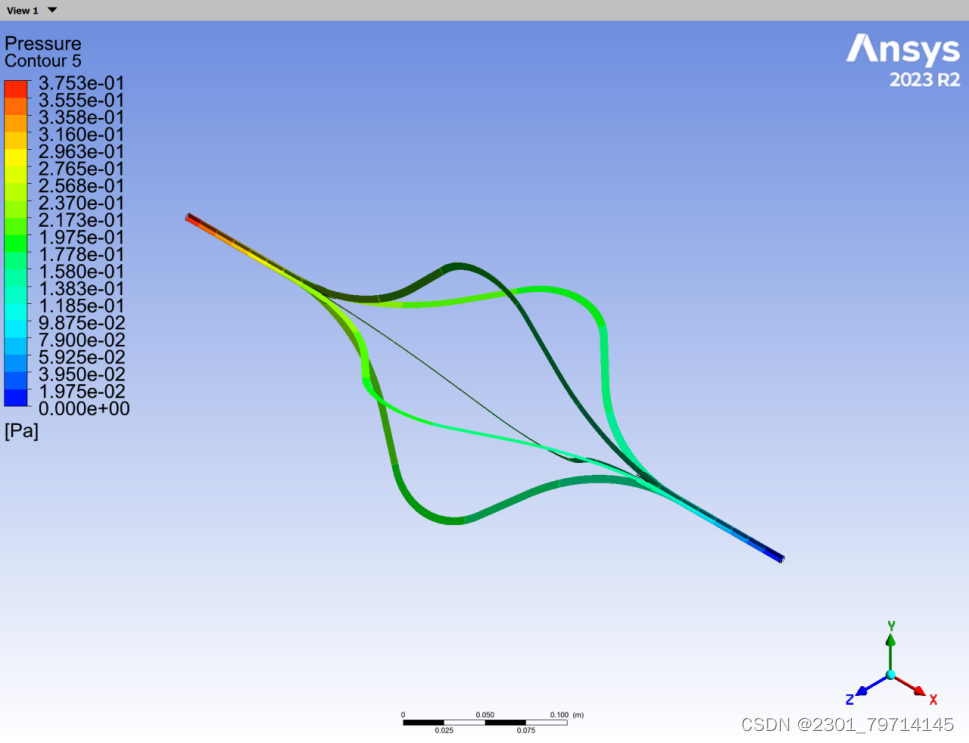
压力云图:
理论学习部分
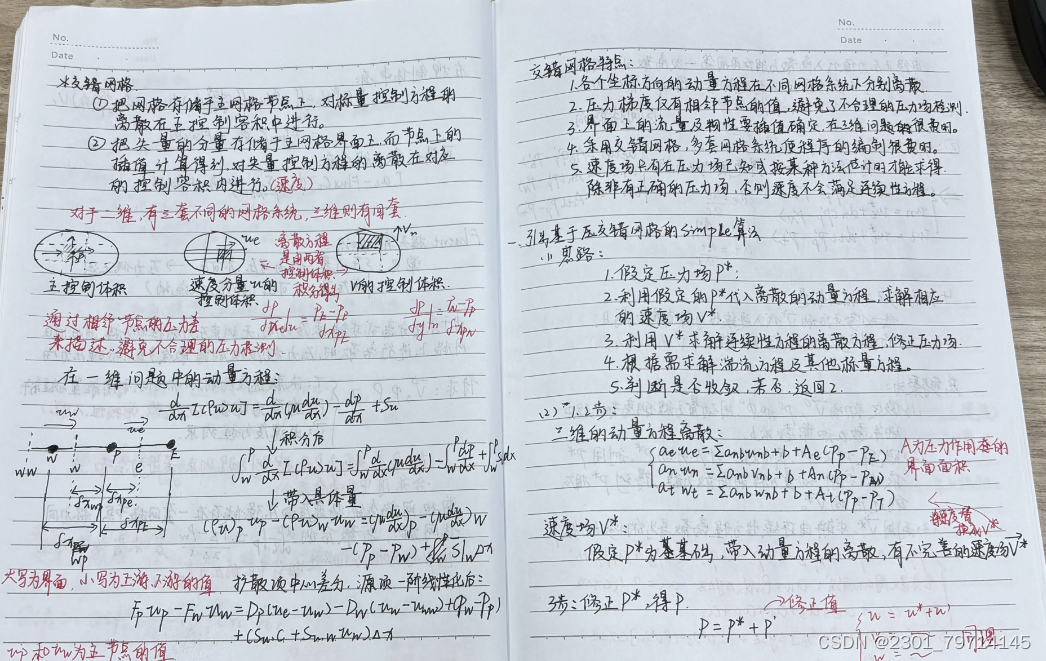
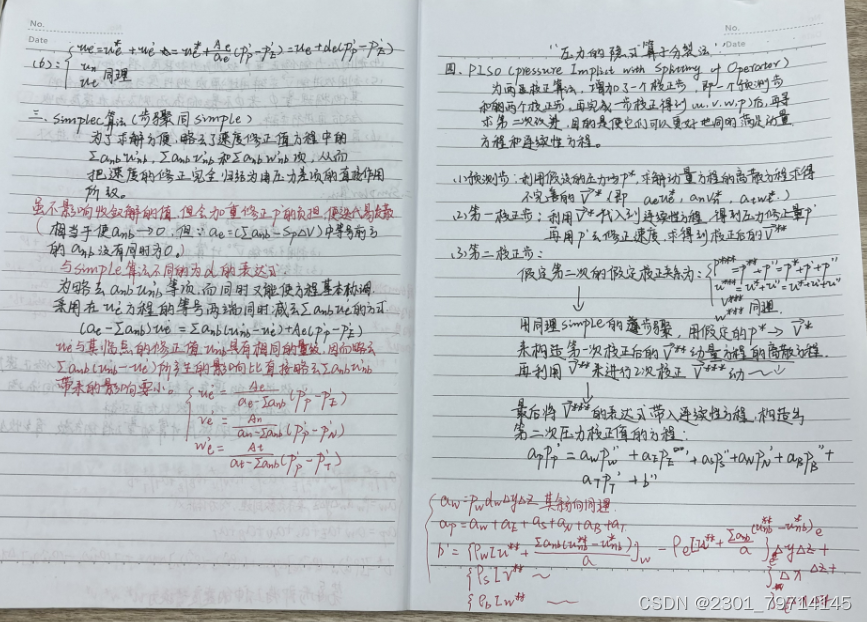
总结
本周学习了新型PINN,关于重分配点的相关理论知识我还没有进行学习,故阅读中所遇到相关理论时显得有些无助,若出现讲不明白的地方麻烦进行指正,关于有限体积法相关知识已经基本叙述完毕,为了能更好的掌握Fluent这款软件,以后将会针对其中出现的算法进行学习。