单线激光雷达思岚 S 系列
参数简介
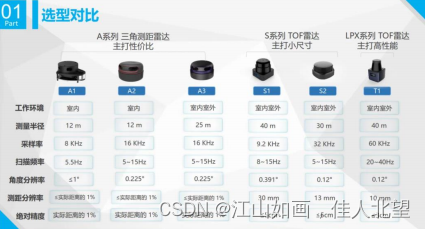
单线激光雷达的参数,主要看扫描频率(Hz),扫描范围(度),最大测距距离(m)以及单
圈点数)。机器人运动速度越快,需要对应的扫描频率就越高;而需要的精度越高,障碍物
的体积越小,也就需要越高的单圈点数。一般来说还会考量抗光线干扰的能力,不过一般没
有具体的量化指标,只能在实际场地测试。思岚系列的单线激光雷达关键参数如图所示
安装与测试
sudo apt install ros-melodic-rplidar-ros
mkdir -p rplidar_ws/src
cd rplidar_ws/src
git clone https://github.com/Slamtec/rplidar_ros
cd ..
catkin_make
source devel/setup.bash
sudo chmod 777 /dev/ttyUSB0
roslaunch rplidar_ros rplidar.launch
#检查是否安装成功,如果有输出则代表安装成功
rostopic hz /scan
多线激光雷达 Robosense
Robosense 不同型号的雷达参数如下图所示
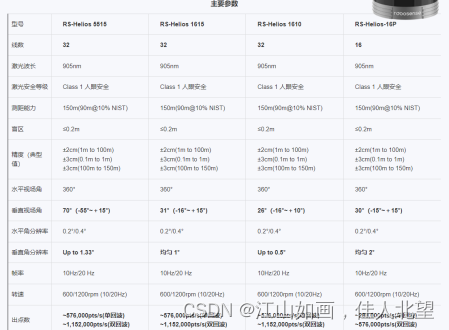
1、线数: 单线激光雷达只能获取二维平面信息,多线即可获取三维信息(通常来说,线束
越多,对环境描述越充分)。
2、量程: 激光雷达以量程远且精度高为特性,所标称的量程 多以 10%反射率的漫反射物体
(如白纸)作为测试基准。 同时由于近物距时存在反射强度过高等问题(可理解为过曝),
因此激光雷达不建议在物距过近时使用。
3、波长: 业界常用 905nm 和 1550 nm 两种激光波长(自然光 390~780nm)。其中 905nm
波长激光光损失较少,且探测器价格较低,应用更为广泛;同时 1550nm 波长激光器对人眼
安全性更高,价格也相对更高 (通常短距采用 905nm,长距采用 1550nm)。
4、准度(绝对精度): 表示在目标物距离确定时,单通道测量值与真值的差值(室外,30℃,
10%反射率),主要受目标物距离、环境温度及目标物反射率的影响。
5、精度(重复性精度): 表示在目标物距离确定时,单通道多次测量值的标准差(室外,30℃,
10%反射率),同样受目标物距离、环境温度及目标物反射率的影响。
6、视场角: 主要分为水平视场角及竖直视场角(类比相机)。水平视场角通常为 360°,竖直
视场角与激光发射-接收装置的排列有关。
7、角分辨率:与扫描频率有关(可理解为点频(每秒点云数)固定,扫描频率越高,角分
辨率便越低,针对细小物体的辨别能力也就越弱) 。水平角分辨率通常是均匀的,但竖直角
分辨率可能不均(与场景有关,如中间分辨率高,两侧分辨率低等)。
8、扫描频率: 转速(也可理解为帧率,设备采集一圈为一帧),雷达通常按梯度配置为可调,
便于角分辨率的选择
9、回波模式: 表示激光雷达打出一束激光后可以接收几个回波(激光点有一定面积,可能
出现一个激光点打到两个物体上情况;若单回波模式可能导致一个物体上的激光点没有被捕
捉到,造成信息丢失)。
安装与测试
//将雷达的网线连接到主机的网口后,配置有线连接的 ip 地址为
192.168.1.102,子网掩码设置为 255.255.255.0
//在终端 ping 192.168.1.102,如果有数据返回,说明雷达连接正常
//安装雷达的驱动
sudo apt-get install libpcap-dev
m kdir -p ~/rs16_ws/src
cd ~/rs16_ws/src
git c lone https://github.com/RoboSense-LiDAR/ros_rslidar
cd ..
catkin_make
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
//如果 rviz 中能观察到三维点云,说明激光雷达开始正常工作
//驱动参数的修改可以参照
https://blog.csdn.net/weixin_47552638/article/details/122278125
参考:
https://zhuanlan.zhihu.com/p/450509132
https://www.freesion.com/article/52931433844/




![[Cloud Networking] BGP](https://img-blog.csdnimg.cn/direct/a98c300b77c141ec8a26450e07054bc4.png)