1. GPIO子系统视频概述
1.1 GPIO子系统的作用
芯片内部有很多引脚,这些引脚可以接到GPIO模块,也可以接到I2C等模块。
通过Pinctrl子系统来选择引脚的功能(mux function)、配置引脚:

当一个引脚被复用为GPIO功能时,我们可以去设置它的方向、设置/读取它的值。
GPIO名为"General Purpose Input/Output",通用目的输入/输出,就是常用的引脚。
GPIO可能是芯片自带的,也可能通过I2C、SPI接口扩展:
GPIO有一些通用功能、通用属性。
1.2 通用功能
-
可以设为输出:让它输出高低电平;
-
可以设为输入,读取引脚当前电平;
-
可以用来触发中断
对于芯片自带的GPIO,它的访问时很快的,可以在获得spinlocks的情况下操作它。
但是,对于通过I2C、SPI等接口扩展的GPIO,访问它们时可能导致休眠,所以这些"GPIO Expander"就不能在获得spinlocks的情况下使用。
1.3 通用属性
-
Active-High and Active-Low
以LED为例,需要设置GPIO电平。但是有些电路可能是高电平点亮LED,有些是低电平点亮LED。
可以使用如下代码:
gpiod_set_value(gpio, 1); // 输出高电平点亮LED
gpiod_set_value(gpio, 0); // 输出低电平点亮LED对应同一个目标:点亮LED,对于不同的LED,就需要不同的代码,原因在于上面的代码中1、0表示的是"物理值"。
如果能使用"逻辑值",同样的逻辑值在不同的配置下输出对应的物理值,就可以保持代码一致,比如:
gpiod_set_value(gpio, 1); // 输出逻辑1// 在Active-High的情况下它会输出高电平// 在Active-Low的情况下它会输出低电平-
Open Drain and Open Source
有多个GPIO驱动同时驱动一个电路时,就需要设置Open Drain或Open Source。
-
Open Drain:引脚被设置为低电平时才会驱动电路,典型场景是I2C接口。
-
Open Source:引脚被设置为高电平时才会驱动电路
-
1.4 GPIO子系统的作用
管理GPIO,既能支持芯片本身的GPIO,也能支持扩展的GPIO。
提供统一的、简便的访问接口,实现:输入、输出、中断。
2. GPIO子系统层次与数据结构
2.1 GPIO子系统的层次
2.1.1 层次

2.1.2 GPIOLIB向上提供的接口
概述:向上接口主要有几类:获得GPIO,设置方向,读值写值,释放GPIO;
在Linux内核中,GPIOLIB 是一个通用的 GPIO (通用输入输出) 抽象层,它提供了一组 API 供驱动程序和用户空间程序使用。以下是 GPIOLIB 向上提供的主要接口及其说明:
-
gpio_request:- 请求一个GPIO引脚。如果成功,内核将保留该引脚供请求者使用,并返回一个唯一的GPIO编号。
-
gpio_free:- 释放一个之前请求的GPIO引脚,使其可供其他驱动程序使用。
-
gpio_direction_input:- 将GPIO引脚配置为输入模式。
-
gpio_direction_output:- 将GPIO引脚配置为输出模式,并可选地设置初始输出值。
-
gpio_get_value:- 读取GPIO引脚的输入值。
-
gpio_set_value:- 写入GPIO引脚的输出值。
-
gpio_get_value_cansleep:- 与
gpio_get_value类似,但此函数可以在睡眠上下文中使用。
- 与
-
gpio_set_value_cansleep:- 与
gpio_set_value类似,但此函数可以在睡眠上下文中使用。
- 与
-
gpio_cansleep:- 检查对GPIO引脚的操作是否可以在睡眠上下文中执行。
-
gpio_to_irq:- 将GPIO引脚转换为中断号,以便可以请求中断。
-
irq_to_gpio:- 将中断号转换回GPIO引脚。
-
gpiochip_add:- 注册一个
gpio_chip结构体,它描述了一组GPIO引脚及其操作函数。
- 注册一个
-
gpiochip_remove:- 移除之前注册的
gpio_chip。
- 移除之前注册的
-
gpiochip_line_config:- 配置
gpio_chip中的特定引脚。
- 配置
-
gpiochip_request_own:- 请求对
gpio_chip中的引脚的所有权。
- 请求对
-
gpiochip_request_unown:- 释放对
gpio_chip中的引脚的所有权。
- 释放对
-
gpiochip_set:- 为
gpio_chip中的多个引脚设置值。
- 为
-
gpiochip_clear:- 清除
gpio_chip中的多个引脚的值。
- 清除
-
gpiochip_set_direction:- 为
gpio_chip中的多个引脚设置方向。
- 为
-
gpiochip_get_direction:- 获取
gpio_chip中引脚的方向。
- 获取
这些接口为内核中的驱动程序提供了一种通用的方式来操作硬件GPIO引脚,同时隐藏了具体的硬件细节。此外,GPIOLIB 还提供了一些辅助函数,用于处理GPIO引脚的请求和释放,以及配置引脚的输入/输出模式。
2.1.3 GPIOLIB向下提供的接口
概述:获得引脚,释放引脚,配置引脚,读取\写入值,清除引脚,获取地址,获取标签(信息),配置中断
-
chip.request:- 用于请求一个 GPIO 引脚。硬件驱动程序需要实现此函数来请求并分配一个 GPIO 引脚。
-
chip.free:- 用于释放一个之前请求的 GPIO 引脚。硬件驱动程序需要实现此函数来释放并回收该引脚。
-
chip.direction_input:- 配置 GPIO 引脚为输入模式。硬件驱动需要实现此函数来设置引脚方向。
-
chip.direction_output:- 配置 GPIO 引脚为输出模式,并可设置初始输出值。硬件驱动需要实现此函数。
-
chip.get:- 读取 GPIO 引脚的值。硬件驱动需要实现此函数来返回引脚的当前状态。
-
chip.set:- 向 GPIO 引脚写入高电平。硬件驱动需要实现此函数来设置引脚状态。
-
chip.clear:- 向 GPIO 引脚写入低电平。硬件驱动需要实现此函数来清除引脚状态。
-
chip.set_config:- 配置 GPIO 引脚的参数,如上拉/下拉、驱动强度等。硬件驱动需要实现此函数。
-
chip.to_irq:- 如果支持,将 GPIO 引脚转换为中断号。硬件驱动需要实现此函数。
-
chip.dbg_show:- 用于调试目的,显示 GPIO 引脚的状态。硬件驱动可以提供此函数。
-
chip.label:- 获取 GPIO 芯片的标签。硬件驱动需要提供此函数。
-
chip.base:- 获取 GPIO 芯片的基地址,通常用于芯片注册。
-
chip.ngpio:- 获取 GPIO 芯片支持的 GPIO 引脚数量。
-
chip.parent:- 获取 GPIO 芯片的父设备,通常用于设备树集成。
-
chip.of_node:- 获取 GPIO 芯片的设备树节点。
-
chip.of_xlate:- 用于设备树中 GPIO 引脚的转换,硬件驱动需要实现此函数。
这些接口定义在 struct gpio_chip 结构体中,硬件平台的 GPIO 驱动程序需要填充这个结构体并实现相应的函数。这样,GPIOLIB 可以与底层硬件交互,而上层的驱动程序和应用程序则可以使用 GPIOLIB 提供的通用接口来操作 GPIO 引脚。
2.2 重要的3个核心数据结构
记住GPIO Controller的要素,这有助于理解它的驱动程序:
-
一个GPIO Controller里有多少个引脚?有哪些引脚?
-
需要提供函数,设置引脚方向、读取/设置数值
-
需要提供函数,把引脚转换为中断
以Linux面向对象编程的思想,一个GPIO Controller必定会使用一个结构体来表示,这个结构体必定含有这些信息:
-
GPIO引脚信息
-
控制引脚的函数
-
中断相关的函数
2.2.1 gpio_device
每个GPIO Controller用一个gpio_device来表示:
-
里面每一个gpio引脚用一个gpio_desc来表示
-
gpio引脚的函数(引脚控制、中断相关),都放在gpio_chip里

2.2.2 gpio_chip
我们并不需要自己创建gpio_device,编写驱动时要创建的是gpio_chip,里面提供了:
-
控制引脚的函数
-
中断相关的函数
-
引脚信息:支持多少个引脚?各个引脚的名字?
(实现GPIOLIB向下提供的接口函数)

2.2.3 gpio_desc
我们去使用GPIO子系统时,首先是获得某个引脚对应的gpio_desc。
gpio_device表示一个GPIO Controller,里面支持多个GPIO。
在gpio_device中有一个gpio_desc数组,每一引脚有一项gpio_desc。

2.3 怎么编写GPIO Controller驱动程序
分配、设置、注册gpioc_chip结构体,示例:drivers\gpio\gpio-74x164.c

3. 编写一个虚拟GPIO控制器的驱动程序
概述:核心:分配/设置/注册一个gpio_chip结构体。
头文件支持,定义全局变量结构体指针chip()
定义一个全局变量用于模拟GPIO的
#include <linux/module.h> // 模块化编程支持
#include <linux/err.h> // 错误处理
#include <linux/init.h> // 模块初始化和清理宏
#include <linux/io.h> // IO操作
#include <linux/mfd/syscon.h> // 系统控制
#include <linux/of.h> // 设备树操作
#include <linux/of_device.h> // 设备树设备操作
#include <linux/of_address.h> // 设备树地址解析
#include <linux/gpio/consumer.h> // GPIO消费者
#include <linux/gpio/driver.h> // GPIO驱动
#include <linux/slab.h> // 内存分配
#include <linux/regmap.h> // 寄存器映射static struct gpio_chip * g_virt_gpio; // 定义一个全局的gpio_chip指针
static int g_gpio_val = 0; // 定义一个全局变量,用于模拟GPIO值定义设备树匹配表,设置GPIO属性->方向(输入和输出),获取GPIO的值,设置GPIO的值
// 设备树匹配表
static const struct of_device_id virtual_gpio_of_match[] = {{ .compatible = "100ask,virtual_gpio", },{ },
};// 设置GPIO方向为输出
static int virt_gpio_direction_output(struct gpio_chip *gc,unsigned offset, int val)
{printk("set pin %d as output %s\n", offset, val ? "high" : "low");return 0;
}// 设置GPIO方向为输入
static int virt_gpio_direction_input(struct gpio_chip *chip,unsigned offset)
{printk("set pin %d as input\n", offset);return 0;
}// 获取GPIO值
static int virt_gpio_get_value(struct gpio_chip *gc, unsigned offset)
{return (g_gpio_val & (1<<offset)) ? 1 : 0;
}// 设置GPIO值
static void virt_gpio_set_value(struct gpio_chip *gc,unsigned offset, int val)
{if (val)g_gpio_val |= (1 << offset);elseg_gpio_val &= ~(1 << offset);
}平台驱动探测函数:分配,设置(设置函数,设置值),注册(在内核中添加身份信息)
// 平台设备探测函数
static int virtual_gpio_probe(struct platform_device *pdev)
{int ret;printk(KERN_INFO "%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);/* 1. 分配gpio_chip */g_virt_gpio = devm_kzalloc(&pdev->dev, sizeof(*g_virt_gpio), GFP_KERNEL);/* 2. 设置gpio_chip *//* 2.1 设置函数 */g_virt_gpio->label = pdev->name;g_virt_gpio->direction_output = virt_gpio_direction_output;g_virt_gpio->direction_input = virt_gpio_direction_input;g_virt_gpio->get = virt_gpio_get_value;g_virt_gpio->set = virt_gpio_set_value;g_virt_gpio->parent = &pdev->dev;g_virt_gpio->owner = THIS_MODULE;/* 2.2 设置base、ngpio值 */g_virt_gpio->base = -1;ret = of_property_read_u32(pdev->dev.of_node, "ngpios", &g_virt_gpio->ngpio);/* 3. 注册gpio_chip */ret = devm_gpiochip_add_data(g_virt_gpio, NULL);return 0;
}定义平台设备移除函数,定义虚拟GPIO驱动结构体,定义入口函数(注册平台驱动),出口函数(反注册平台驱动),
// 平台设备移除函数
static int virtual_gpio_remove(struct platform_device *pdev)
{printk(KERN_INFO "%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}// 虚拟GPIO驱动结构体
static struct platform_driver virtual_gpio_driver = {.probe = virtual_gpio_probe,.remove = virtual_gpio_remove,.driver = {.name = "100ask_virtual_gpio",.of_match_table = of_match_ptr(virtual_gpio_of_match),}
};/* 1. 入口函数 */
static int __init virtual_gpio_init(void)
{ printk(KERN_INFO "%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);/* 1.1 注册一个platform_driver */return platform_driver_register(&virtual_gpio_driver);
}/* 2. 出口函数 */
static void __exit virtual_gpio_exit(void)
{printk(KERN_INFO "%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);/* 2.1 反注册platform_driver */platform_driver_unregister(&virtual_gpio_driver);
}module_init(virtual_gpio_init);
module_exit(virtual_gpio_exit);MODULE_LICENSE("GPL");4. GPIO子系统与Pinctrl子系统的交互
4.1 使用GPIO前应该设置Pinctrl
假设使用这个虚拟的GPIO Controller的pinA来控制LED:

要使用pinA来控制LED,首先要通过Pinctrl子系统把它设置为GPIO功能,然后才能设置它为输出引脚、设置它的输出值。
所以在设备树文件里,应该添加Pinctrl的内容:
virtual_pincontroller {compatible = "100ask,virtual_pinctrl";myled_pin: myled_pin {functions = "gpio";groups = "pin0";configs = <0x11223344>;};
};gpio_virt: virtual_gpiocontroller {compatible = "100ask,virtual_gpio";gpio-controller;#gpio-cells = <2>;ngpios = <4>;
};myled {compatible = "100ask,leddrv";led-gpios = <&gpio_virt 0 GPIO_ACTIVE_LOW>;pinctrl-names = "default";pinctrl-0 = <&myled_pin>;
};这段代码包含了三个主要部分,分别定义了三个不同的设备节点,它们在设备树(Device Tree)中用于描述硬件设备的配置和它们之间的关系。以下是对每个部分的解释:
-
virtual_pincontroller 节点:
compatible属性指定了设备的兼容字符串,用于确定使用哪个驱动程序。myled_pin是一个子节点,代表一个具体的引脚配置。functions属性定义了引脚的复用功能,这里是 "gpio",表示该引脚被用作通用输入输出。groups属性指定了引脚组,这里是 "pin0"。configs属性提供了引脚的配置参数,这里使用了一个32位的十六进制数0x11223344。
-
gpio_virt 节点:
- 同样使用
compatible属性来指定驱动程序。 gpio-controller表示这是一个GPIO控制器。#gpio-cells属性定义了每个GPIO引脚需要多少个单元来描述,这里是<2>,通常表示一个单元用于GPIO号,另一个用于标志。ngpios属性定义了控制器拥有的GPIO引脚数量,这里是<4>,表示有4个GPIO引脚。- 这个节点可能与
virtual_pincontroller节点相关联,用于控制引脚的GPIO功能。
- 同样使用
-
myled 节点:
compatible属性指定了LED驱动的兼容字符串。led-gpios属性定义了控制LED的GPIO引脚,格式为<&gpio_virt 0 GPIO_ACTIVE_LOW>,表示使用gpio_virt控制器的第0号引脚,且为低电平有效。pinctrl-names和pinctrl-0属性用于指定引脚控制的名称和默认配置,这里引用了myled_pin节点。
设备树节点之间的关系:
gpio_virt节点定义了一个GPIO控制器,它可能控制着一些物理或虚拟的GPIO引脚。myled节点定义了一个LED设备,它使用gpio_virt控制器的第0号引脚来控制LED的开关。virtual_pincontroller节点定义了一个虚拟的引脚控制器,它可能用于更复杂的引脚控制逻辑,比如配置引脚的复用功能、配置参数等。
代码作用:
- 这段设备树配置告诉内核如何初始化和配置相关的硬件设备,特别是如何将特定的GPIO引脚配置为控制LED,并指定了引脚的其他配置参数。
- 当内核启动时,它将解析设备树中的这些节点,并根据这些信息加载相应的驱动程序,初始化硬件设备。
在嵌入式Linux系统中,设备树是一种重要的机制,用于描述硬件设备的配置,特别是在没有BIOS或UEFI等传统固件的情况下。设备树允许内核以一种硬件无关的方式来初始化和控制硬件设备。
但是很多芯片,并不要求在设备树中把把引脚复用为GPIO功能。
比如STM32MP157,在它的设备树工具STM32CubeMX即使把引脚配置为GPIO功能,它也不会在设备树中出现。
原因在于:GPIO走了后门。
现实的芯片中,并没有Pinctrl这样的硬件,它的功能大部分是在GPIO模块中实现的。
Pinctrl是一个软件虚拟处理的概念,它的实现本来就跟GPIO密切相关。
甚至一些引脚默认就是GPIO功能。
按理说:
一个引脚可能被用作GPIO,也可能被用作I2C,GPIO和I2C这些功能时相同低位的。
要用作GPIO,需要先通过Pinctrl把引脚复用为GPIO功能。
但是Pinctrl和GPIO关系密切,当你使用gpiod_get获得GPIO引脚时,它就偷偷地通过Pinctrl把引脚复用为GPIO功能了。
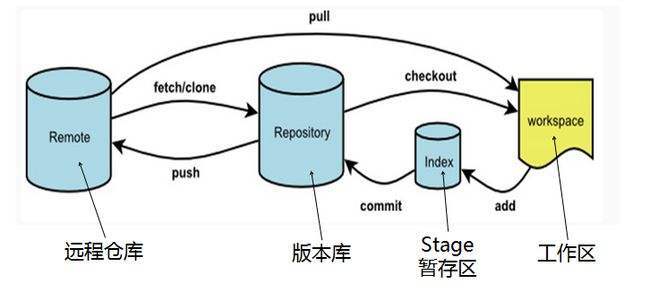
4.2 GPIO和Pinctrl的映射关系

从上图可知:
-
左边的Pinctrl支持8个引脚,在Pinctrl的内部编号为0~7
-
图中有2个GPIO控制器
-
GPIO0内部引脚编号为0~3,假设在GPIO子系统中全局编号为100~103
-
GPIO1内部引脚编号为0~3,假设在GPIO子系统中全局编号为104~107
-
-
假设我们要使用pin1_1,应该这样做:
-
根据GPIO1的内部编号1,可以换算为Pinctrl子系统中的编号5
-
使用Pinctrl的函数,把第5个引脚配置为GPIO功能
-
数据结构

4.3 GPIO调用Pinctrl的过程
GPIO子系统中的request函数,用来申请某个GPIO引脚,
它会导致Pinctrl子系统中的这2个函数之一被调用:pmxops->gpio_request_enable或pmxops->request

调用关系如下:
gpiod_getgpiod_get_indexdesc = of_find_gpio(dev, con_id, idx, &lookupflags);ret = gpiod_request(desc, con_id ? con_id : devname);ret = gpiod_request_commit(desc, label);if (chip->request) {ret = chip->request(chip, offset);}这段代码片段是Linux内核中使用GPIO描述符(gpiod)API处理GPIO线的一部分。这个API用于以更抽象的方式处理GPIO,允许更好的硬件抽象,使跨不同硬件平台的GPIO操作变得更容易。以下是每个函数的作用详解:。
- `gpiod_get_index` 函数可能是获取特定索引GPIO线GPIO描述符的包装器或过程的一部分。
- `of_find_gpio` 函数使用设备树根据设备和连接ID找到GPIO描述符。
- `gpiod_request` 函数使用描述符请求GPIO线,并为GPIO线的使用请求一个标签。
- `gpiod_request_commit` 函数提交GPIO请求,使GPIO线准备好使用。
- 如果GPIO芯片有一个自定义的请求函数 (`chip->request`),这里会调用它来执行任何必要的硬件特定设置。
这段代码片段是通常涉及配置GPIO线(例如,将其设置为输入或输出,配置上拉/下拉电阻等)并然后用于其预定目的(例如,从传感器读取输入,驱动LED等)的更大过程中的一部分。确切的实现细节可以根据硬件平台和正在使用的GPIO线的具体要求而有所不同。
我们编写GPIO驱动程序时,所设置chip->request函数,一般直接调用gpiochip_generic_request,它导致Pinctrl把引脚复用为GPIO功能。
gpiochip_generic_request(struct gpio_chip *chip, unsigned offset)pinctrl_request_gpio(chip->gpiodev->base + offset)ret = pinctrl_get_device_gpio_range(gpio, &pctldev, &range); // gpio是引脚的全局编号/* Convert to the pin controllers number space */pin = gpio_to_pin(range, gpio);ret = pinmux_request_gpio(pctldev, range, pin, gpio);ret = pin_request(pctldev, pin, owner, range);代码流程解释:
gpiochip_generic_request函数被调用以请求一个GPIO。pinctrl_request_gpio函数使用设备的基地址和GPIO偏移量来计算全局GPIO编号。pinctrl_get_device_gpio_range函数根据全局GPIO编号获取引脚控制器设备和GPIO的编号范围。- 通过
gpio_to_pin将全局GPIO编号转换为引脚控制器的编号空间。 pinmux_request_gpio函数请求引脚复用,确保引脚可以被用作所需的功能。pin_request函数在引脚控制器中实际请求引脚,保留它并标记为已使用。
这个过程是Linux内核中处理GPIO请求的标准方式,确保了在不同硬件平台上对GPIO的请求是统一和一致的。通过这种方式,驱动程序可以请求和使用GPIO,而不必担心底层硬件的具体细节。
Pinctrl子系统中的pin_request函数就会把引脚配置为GPIO功能:
static int pin_request(struct pinctrl_dev *pctldev,int pin, const char *owner,struct pinctrl_gpio_range *gpio_range)
{const struct pinmux_ops *ops = pctldev->desc->pmxops;/** If there is no kind of request function for the pin we just assume* we got it by default and proceed.*/if (gpio_range && ops->gpio_request_enable)/* This requests and enables a single GPIO pin */status = ops->gpio_request_enable(pctldev, gpio_range, pin);else if (ops->request)status = ops->request(pctldev, pin);elsestatus = 0;
}这段代码是一个名为 pin_request 的静态函数,它的作用是请求(reserve)一个特定的引脚(pin),以供驱动程序或其他用途使用。

这个 pin_request 函数是引脚控制子系统中的一个关键组件,它确保了对特定引脚的独占访问,防止多个驱动程序同时使用同一个引脚。这是嵌入式系统和硬件抽象中常见的需求,特别是在多个硬件设备可能需要使用相同物理引脚的情况下。