目录
- 前言
- PointCNN实现细节
- 1. X X X-Conv 操作
- 输入
- 输出
- 步骤
- 2. PointCNN 网络架构
- 层级卷积
- 分类与分割任务
- 3. 数据增强
- 4. 效率优化
前言
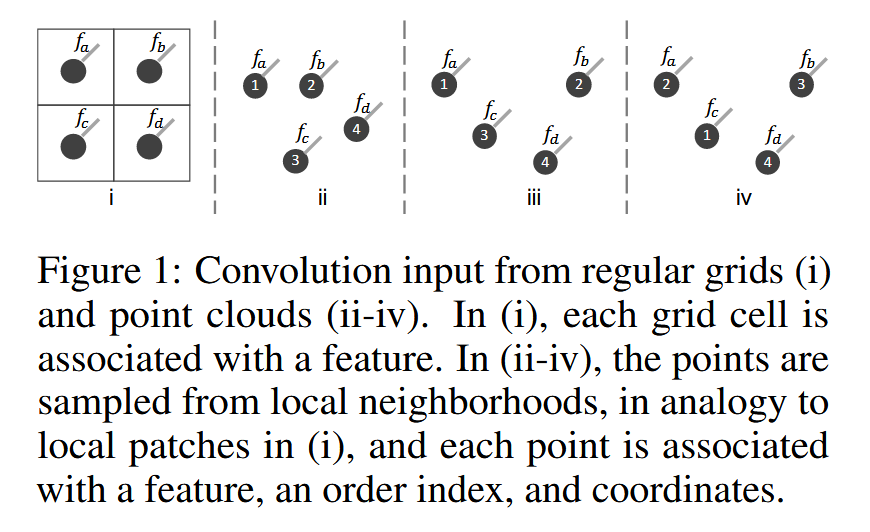
这篇论文介绍了一种名为 PointCNN 的方法,旨在从点云(point cloud)数据中学习特征。传统卷积神经网络(CNN)在处理规则网格数据(如图像)时非常有效,但由于点云是无序且不规则的,直接在其上应用卷积操作会导致形状信息丢失,并对点的排列顺序敏感。
为了解决这一问题,论文提出了一种 X-Conv 操作。该方法通过学习一种 X-transformation 来重新排列点云中的点并加权输入特征。然后,将典型的卷积操作应用于转换后的特征。这种方法将传统的 CNN 扩展到点云特征学习,并命名为 PointCNN。
实验表明,PointCNN 在多个基准数据集上达到了与当前最先进方法相当甚至更好的性能。这些数据集包括 3D 形状分类(如 ModelNet40)、分割任务(如 ShapeNet Parts 和 ScanNet),以及 2D 草图分类任务(如 TU-Berlin 和 Quick Draw)。
论文的关键贡献在于提出了适用于点云的卷积操作,并展示了其在多种任务上的有效性。
PointCNN实现细节
PointCNN 是一种针对点云数据进行特征学习的卷积神经网络架构。它的设计初衷是为了克服传统卷积神经网络(CNN)在处理点云数据时遇到的挑战。点云数据是不规则且无序的,因此直接将传统的卷积操作应用在点云上会导致形状信息的丢失,并且对点的排列顺序非常敏感。
PointCNN 的核心思想是引入一种叫做 X-Conv 的操作,这种操作通过学习一个 X-transformation 变换矩阵来同时加权和排列输入点云的数据,使得卷积操作可以更有效地应用于点云。具体来说,X-transformation 将点云的点映射到一个潜在的、或许是规范化的顺序中,然后在变换后的特征上应用卷积操作。
相比于直接对点云进行卷积,PointCNN 通过 X-Conv 操作保留了点云的局部结构信息,同时对点的排列顺序具有不变性。这使得它在点云的各种任务中表现出色,例如3D形状分类、分割任务和草图分类等。
简而言之,PointCNN 是一个能够处理不规则点云数据的通用卷积网络架构,解决了点云数据中的排列问题,并在多个任务上达到了与最先进方法相当甚至更好的性能。
1. X X X-Conv 操作
X X X-Conv 是 PointCNN 的核心操作,它通过学习一个 X X X-转换矩阵,对输入点及其特征进行加权和排序,然后进行卷积操作。整个 X X X-Conv 的过程如下:
输入
- K K K: 表示点邻域中的 K K K 个点。
- p p p: 表示当前代表点。
- P P P: 当前点 p p p 的 K K K 个邻域点的坐标,表示为 P = ( p 1 , p 2 , … , p K ) T P = (p_1, p_2, \dots, p_K)^T P=(p1,p2,…,pK)T。
- F F F: 邻域点的特征矩阵,表示为 F = ( f 1 , f 2 , … , f K ) T F = (f_1, f_2, \dots, f_K)^T F=(f1,f2,…,fK)T,其中 f i ∈ R C 1 f_i \in \mathbb{R}^{C_1} fi∈RC1。
输出
- F p F_p Fp: 聚合到代表点 p p p 的输出特征。
步骤
- 局部坐标系变换:首先将邻域点的坐标转换为相对于代表点 p p p 的局部坐标系,即 P ′ ← P − p . P' \leftarrow P - p. P′←P−p.
- 升维操作:通过多层感知机(MLP),将每个邻域点的坐标升维到 C δ C_\delta Cδ 维空间,得到 F δ F_\delta Fδ,即 F δ ← MLP δ ( P ′ ) . F_\delta \leftarrow \text{MLP}_\delta(P'). Fδ←MLPδ(P′).
- 特征拼接:将升维后的坐标特征 F δ F_\delta Fδ 与原始特征 F F F 进行拼接,形成新的特征矩阵 F ∗ F^* F∗,其形状为 K × ( C δ + C 1 ) K \times (C_\delta + C_1) K×(Cδ+C1): F ∗ ← [ F δ , F ] . F^* \leftarrow [F_\delta, F]. F∗←[Fδ,F].
- X X X-转换矩阵的学习:通过一个 MLP 网络,从局部坐标 P ′ P' P′ 中学习到一个 K × K K \times K K×K 的 X X X-转换矩阵: X ← MLP ( P ′ ) . X \leftarrow \text{MLP}(P'). X←MLP(P′).
- 加权和排序:对拼接后的特征矩阵 F ∗ F^* F∗ 进行加权和排序,得到 F X F_X FX: F X ← X × F ∗ . F_X \leftarrow X \times F^*. FX←X×F∗.
- 卷积操作:最后,将加权后的特征 F X F_X FX 与卷积核进行卷积操作,输出结果特征 F p F_p Fp: F p ← Conv ( K , F X ) . F_p \leftarrow \text{Conv}(K, F_X). Fp←Conv(K,FX).
该过程可以总结为如下公式: F p = X -Conv ( K , p , P , F ) = Conv ( K , MLP ( P − p ) × [ MLP δ ( P − p ) , F ] ) . F_p = X\text{-Conv}(K, p, P, F) = \text{Conv}(K, \text{MLP}(P - p) \times [\text{MLP}_\delta(P - p), F]). Fp=X-Conv(K,p,P,F)=Conv(K,MLP(P−p)×[MLPδ(P−p),F]).
2. PointCNN 网络架构
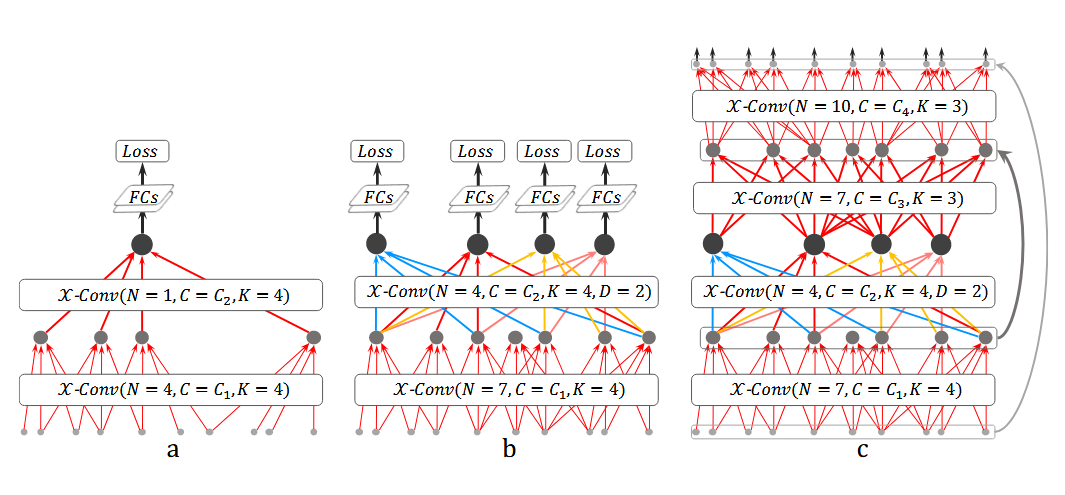
PointCNN 使用 X X X-Conv 操作递归地应用在点云的不同层级上,实现了层级特征表示。输入到 PointCNN 的是点集 { ( p 1 , f 1 ) , ( p 2 , f 2 ) , … , ( p N , f N ) } \{(p_1, f_1), (p_2, f_2), \dots, (p_N, f_N)\} {(p1,f1),(p2,f2),…,(pN,fN)},其中 p i p_i pi 是点的坐标, f i f_i fi 是与点关联的特征。
层级卷积
类似于传统 CNN 的层级卷积,PointCNN 通过多层的 X X X-Conv 逐步减少点的数量,并增大特征维度。层级的每一层通过聚合局部点的特征,得到新的代表点及其特征。对于输入点云 F 1 = { ( p 1 , i , f 1 , i ) } F_1 = \{(p_{1,i}, f_{1,i})\} F1={(p1,i,f1,i)},我们可以递归应用 X X X-Conv,生成新的表示 F 2 = { ( p 2 , i , f 2 , i ) } F_2 = \{(p_{2,i}, f_{2,i})\} F2={(p2,i,f2,i)},其中 ∣ F 2 ∣ < ∣ F 1 ∣ |F_2| < |F_1| ∣F2∣<∣F1∣ 且特征维度更高。
每一层的输出可表示为: F l + 1 = X -Conv ( K , P l , F l ) , F_{l+1} = X\text{-Conv}(K, P_l, F_l), Fl+1=X-Conv(K,Pl,Fl), 其中 P l P_l Pl 是第 l l l 层的代表点坐标, F l F_l Fl 是第 l l l 层的特征矩阵, K K K 是邻域点数。
分类与分割任务
-
分类网络:PointCNN 将通过若干 X X X-Conv 层逐步将输入点聚合为较少的代表点,并最终通过全连接层实现分类。在分类网络中,最后一个 X X X-Conv 层的输出是一个全局表示,通常只保留一个代表点,并应用全连接层进行分类。
-
分割网络:在分割任务中,PointCNN 采用类似于 U-Net 的架构, X X X-Conv 不仅在卷积部分应用,也在 DeConv 部分应用,以逐步将全局信息传播到高分辨率的点云表示上。
3. 数据增强
为了提高模型的泛化能力,PointCNN 使用了随机采样和输入点集顺序打乱的数据增强策略。在训练时,PointCNN 随机采样 N ∼ N ( 1024 , 12 8 2 ) N \sim \mathcal{N}(1024, 128^2) N∼N(1024,1282) 个点作为输入,并在每个批次中对输入点的顺序进行打乱。这对于训练一个对点集输入顺序不敏感的模型至关重要。
4. 效率优化
在实现中, X X X-Conv 的复杂度为 O ( K 3 ) O(K^3) O(K3),并且使用了深度可分离卷积来进一步减少计算复杂度。整个操作过程均为可微分的,因此 PointCNN 可以使用反向传播进行训练。