前言
在学习Faster RCNN时,看了许多别人写的博客。看了以后,对Faster RCNN整理有了一个大概的了解,但是对训练时网络内部的数据流还不是很清楚,所以在结合这个版本的faster rcnn代码情况下,对网络数据流进行总结。以便自己更好地掌握Faster rcnn。
训练时的数据流
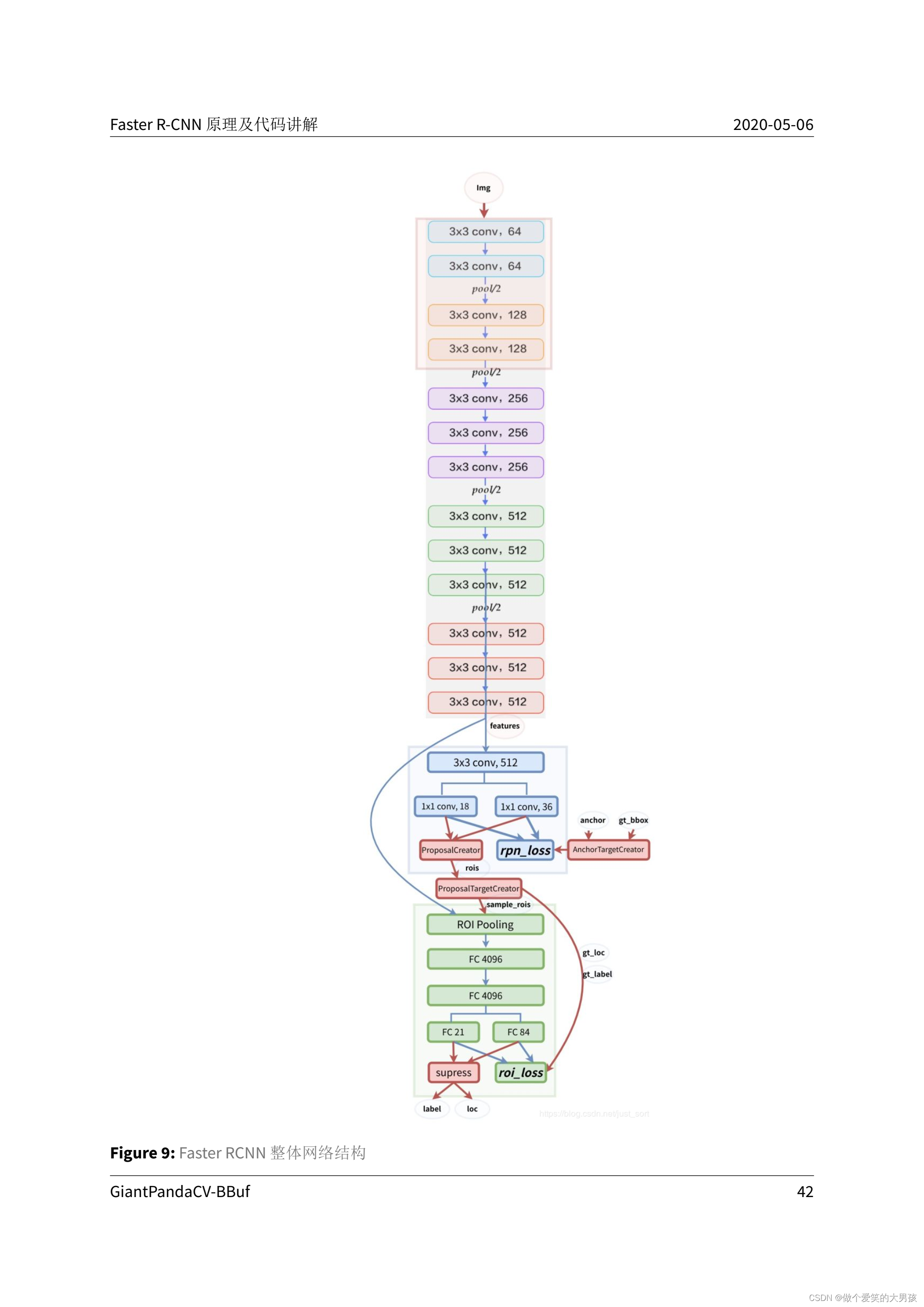
在这个版本的代码中,训练时的batch_size为1。原论文中的网络架构如下所示:

1 ◯ \textcircled{\scriptsize 1} 1◯ 网络输入
第一部分是网络的输入。网络的输入是一个任意大小的图像,但是在被送入网络之前,会经过一个缩放操作,然后进行normalize。对图像进行缩放的同时,也要对gt_bbox(ground truth bounding box,真实边界框)进行同样的缩放。
具体是怎么缩放的呢?参考这里的代码。
def preprocess(img, min_size=600, max_size=1000):# img: 输入图像# min_size: 图像放缩的最小大小# max_size: 图像放缩的最大大小C, H, W = img.shapescale1 = min_size / min(H, W)scale2 = max_size / max(H, W)scale = min(scale1, scale2)img = img / 255.# resize缩放大小 长和宽等比例缩放img = sktsf.resize(img, (C, H * scale, W * scale), mode='reflect',anti_aliasing=False)
这样的等比例缩放方式,结果就是要么原图较长的边被放大为1000,要么原图较短的边被放大为600。整体上来看是设定了一个放大后的最大最小范围。因为batch_size为1,所以每一张图像缩放后的大小可以不一样,如果batch_size不为1,那么这一个batch内的所有图像缩放后的大小就必须一样。在接下来的讨论中我们忽略batch维度(因为batch是1)
2 ◯ \textcircled{\color{green}\scriptsize 2} 2◯ 特征提取网络
第二部分是特征提取模块。这里的特征提取网络是VGG16,只不过去掉了最后的几层全连接。这里感觉唯一要注意的地方就是,输入图像经过VGG16,大小缩小了16倍(因为有4个池化层),维度增加到了512维度。
如果输入图像 I i n p u t I^{input} Iinput的大小是 [ 3 , x , y ] \left[3,x,y\right] [3,x,y],那么经过特征提取的特征图 I f e a t u r e I^{feature} Ifeature的大小是 [ 512 , x 16 , y 16 ] \left[512, \frac{x}{16},\frac{y}{16}\right] [512,16x,16y]。
3 ◯ \textcircled{\color{purple}\scriptsize 3} 3◯ RPN网络
RPN网络的输入是特征图,先经过通道数为512的3x3卷积,输出仍为 [ 512 , x 16 , y 16 ] \left[512, \frac{x}{16},\frac{y}{16}\right] [512,16x,16y]。
右边这个分支为通道数为36(36是因为每个点有9个anchor,每个anchor有4个坐标)的1x1卷积,输出为 [ 36 , x 16 , y 16 ] \left[36, \frac{x}{16},\frac{y}{16}\right] [36,16x,16y],然后对其进行reshap为 [ a n c h o r 的总数 , 4 ] \left[ anchor的总数,4\right] [anchor的总数,4]大小,记为rpn_loc。
左边这个分支为通道数为18(18是因为每个点有9个anchor,每个anchor要么是背景要么是前景,两种可能)的1x1卷积,输出为 [ 18 , x 16 , y 16 ] \left[18, \frac{x}{16},\frac{y}{16}\right] [18,16x,16y]。然后对其经过softmax处理,最终的输出大小为 [ a n c h o r 的总数 , 2 ] \left[anchor的总数,2\right] [anchor的总数,2],记为rpn_score。

上述这点清楚以后,我们接下来重点关注RPN网络是如何计算损失的,称之为 L o s s R P N Loss^{RPN} LossRPN。我们都知道,计算loss需要网络输出值和标签值,现在网络输出值已经有了,那么标签值从何而来呢?
从上图可以看到有一个AnchorTargeCreator模块,这个模块的输入是我们产生anchor和gt_bbox,计算出anchor与gt_bbox的真实偏差gt_rpn_loc和该anchor到底负责的是背景还是前景gt_rpn_label。我们就分别将gt_rpn_loc和gt_rpn_label作为标签值与rpn_score、rpn_score计算损失,两个损失之和即为 L o s s R P N Loss^{RPN} LossRPN。损失的具体计算公式这里我们不谈。
在bbuf大佬的解读里,“AnchorTargetCreator 就是将 20000 多个候选的 Anchor 选出 256 个 Anchor 进行分类和回归。”代码里也是采样出了256个样本,但是最后返回的真实标签值是所有的anchor大小,而不是256大小。
ProposalCreator模块的含义如下:
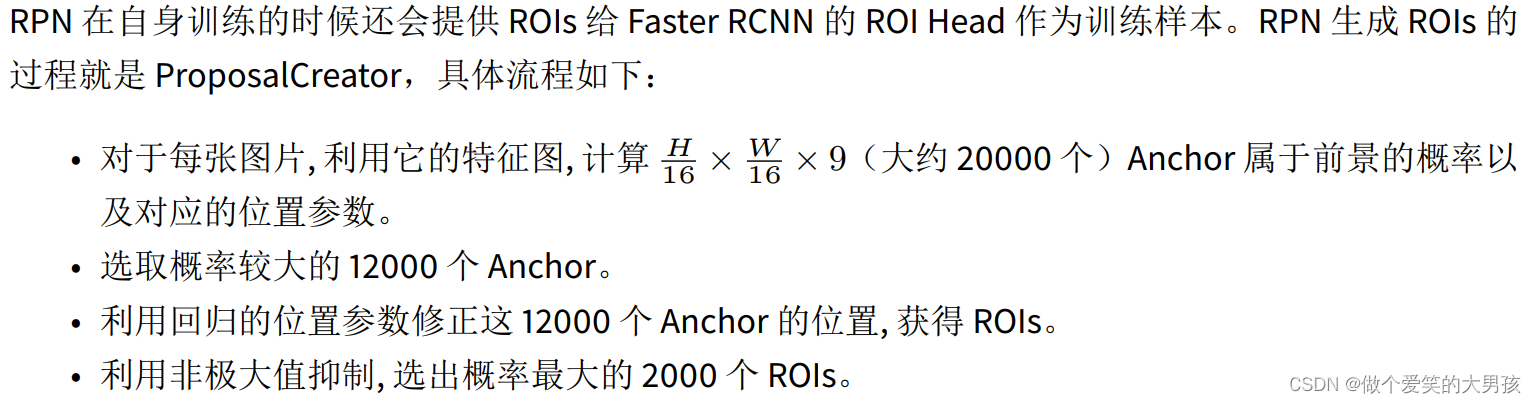
综上,rpn网络除了自身反向传播训练之外,还通过ProposalCreator模块输出2000个anchor。
4 ◯ \textcircled{\color{blue}\scriptsize 4} 4◯ ProposalTargetCreator模块
ProposalCreator模块输出2000个ROIS并不全部都使用,经过ProposalTargetCreator模块的筛选(通过与gt_bbox的IOU进行筛选)产生正负一共128个rois。同时输出这128个rois的gt_label和gt_loc。
5 ◯ \textcircled{\color{blue}\scriptsize 5} 5◯ ROI pooling
这里的ROI pooling和fast rcnn中的是一样的,它的输入是特征图和128个rois。ROI Pooling将这些不同尺寸的区域全部pooling到同一个尺度(7x7)上。ROP pooling的输出输入给classifier。
6 ◯ \textcircled{\color{blue}\scriptsize 6} 6◯ classifier
这里的classifier如下图紫色框出的所示。

这块的全连接网络可以借用VGG16的全连接网络,代码中也是这么做的。
21代表总共有21类,每个anchor属于每个类的概率,输出为 [ 128 , 21 ] [128,21] [128,21];84 = 21 *4,对每个类别都会有一个坐标信息,输出为 [ 128 , 84 ] [128,84] [128,84],然后分别和gt_label、gt_loc计算损失后相加即为classifier的损失。
suppress为推理时的非极大值抑制,训练时用不到。
反向传播
综上所述,我们将rpn网络的损失和classifier的损失相加,然后进行反向传播即可更新参数。
最后放上BBuf大佬总结的faster rcnn的网络流程图。
本人才识浅薄,若博文中有不正确的地方,欢迎大家进行批评指正,谢谢。
参考连接:giantpandacv
simple-faster-rcnn-pytorch