目录
创建空模板
创建粒子
粒子的基础属性
粒子的生命周期
颜色
大小设置
生成的位置
Skeletal Mesh Location的效果:
Shape Location
添加速度
添加Noise力场
在生成中添加:
效果:
编辑
在更新中添加:
效果:
控制粒子过程的大小
控制粒子过程的颜色
添加风的立场
结束
笔者这里使用的是UE5.1
理论很多,但如果只看理论,就无法去学会,所以迈开第一步很重要:
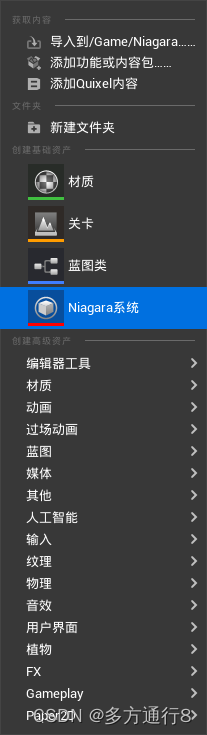
创建空模板
首先我们创建一个空的Niagara系统。


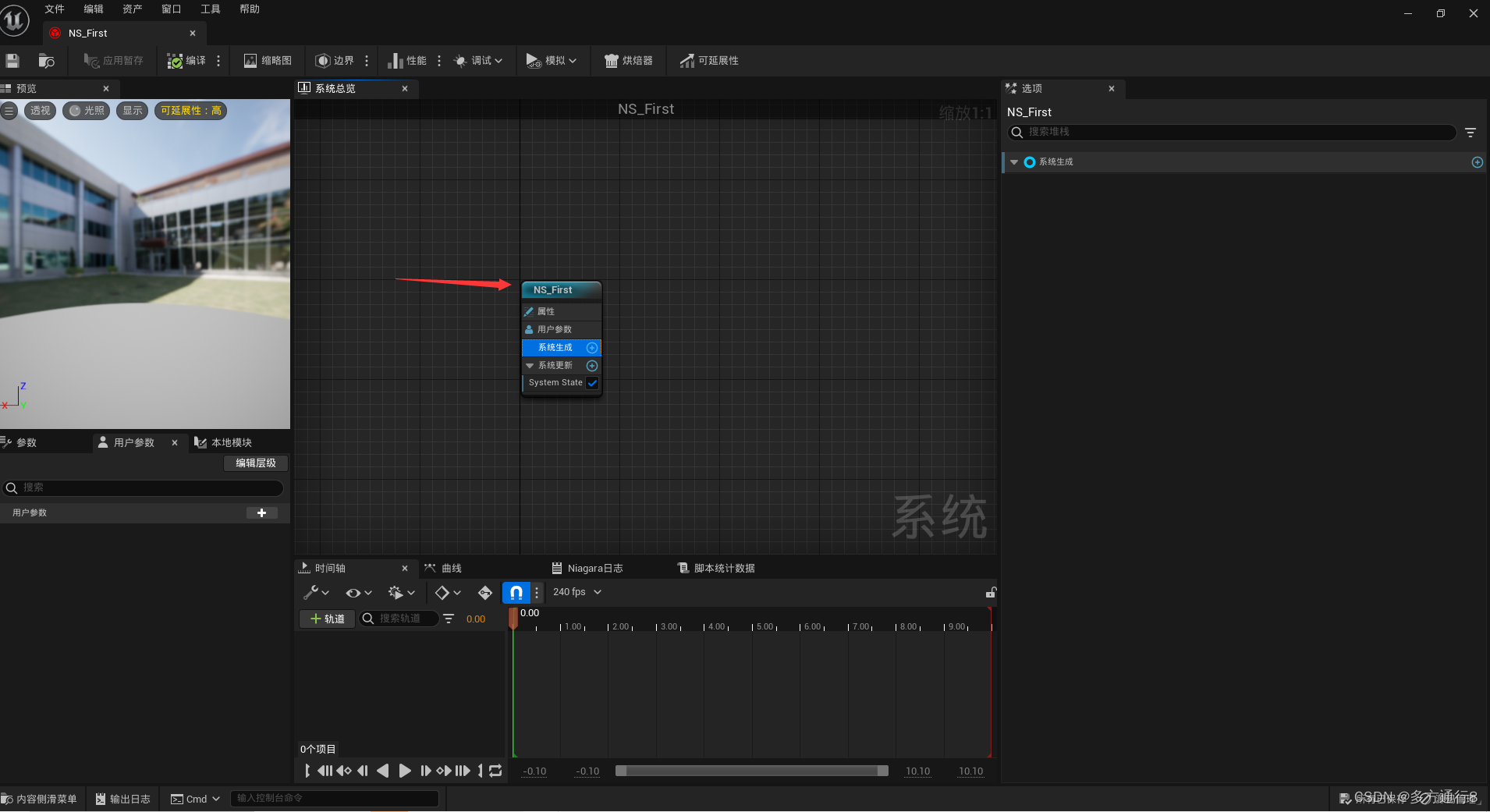
进来之后就发现就一个蓝色的板块,暂时我们不需要管它。
创建一个新的发射器,同样是要空的:
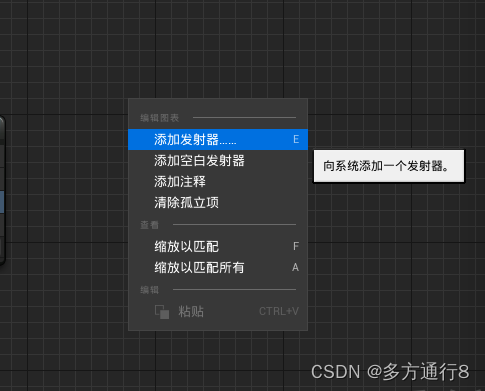

创建粒子
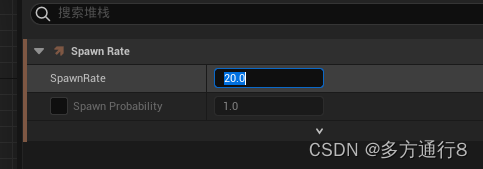
添加之后,发现场景中仍然没有粒子,这是正常的,因为我们并没有对发射器进行添加。所以在发射器更新那里, 添加Spawn Rate,并设置生成的数量:

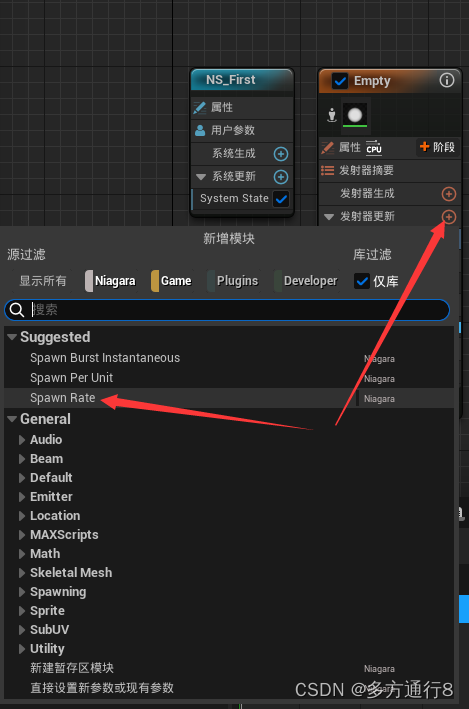
可以看见我们就有了粒子出现了:

粒子的基础属性

找到系统给我们默认生成的这个 Initialize Particle,里面是粒子生成的一些基础属性:
很多都写着Unset,这是没有进行设置的意思,所以我们可以对其进行设置:
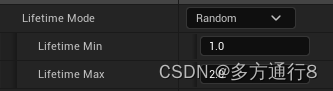
粒子的生命周期

粒子的生命长短,顾名思义是你指定还是进行随机。
指定一个生命周期就是一个固定值,比如2【单位是秒】就是2秒。
随机的话会给你一个最大值和最小值,你进行设置,比如最小是1,最大是5,则生成的粒子的生命周期就是在1s至5s之间。
颜色
可以看到里面有对Unset(未设置),Direct Set(直接设置),Random Range(随机范围),Random Hue/Saturation/Value(随机的色相/饱和度/值)
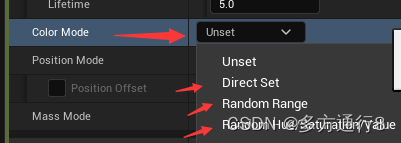
意思顾名思义,所以你可以选择一个自己喜欢的颜色去进行设置。
这里笔者就选择Direct Set,直接对颜色进行一个设置:


大小设置
粒子的大小打开可以看到有五种:
Unset【未设置】,Uniform【统一的】,Random Uniform【随机均匀】,Non-Uniform【不均匀】,Random Non-Uniform【随机不均匀】。
具体的作用顾名思义,各位可以试试:

这里的话笔者就指定Unifotm,做一个固定的值10,可以看到变小了很多:

生成的位置
现在我们生成的粒子都集中在中心点,那么我们想要它形成为一种形状,所以我们可以在粒子生成的地方进行一个添加,我们找到Location里面:
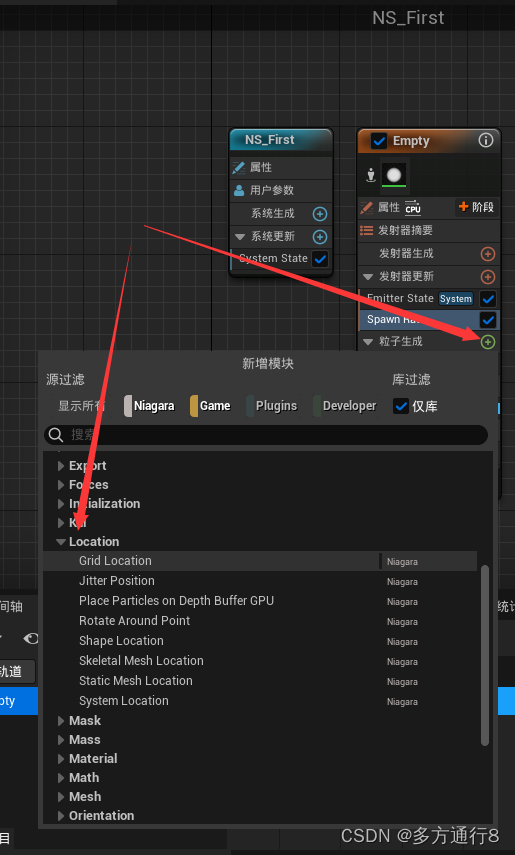
各位可以测试一下里面不同的Location,里面的效果也是十分的有趣的:
比如
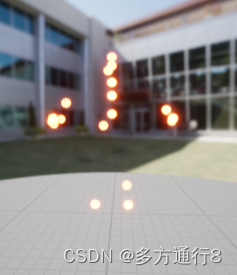
Skeletal Mesh Location的效果:
可以看到隐隐约约有人形,如果我们生成的粒子多一点呢:

Shape Location
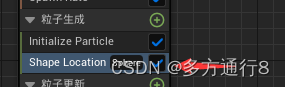
这里我们使用Shape Location,因为里面有一些常用的形状合集。
可以自己选择想要的生成范围:

这里笔者选择的是Box:

甚至在这里,可以发现它会问你,要的是Box【盒体】范围生成,还是Plane【平面】范围生成。
这里的范围自然可以自己去调整。
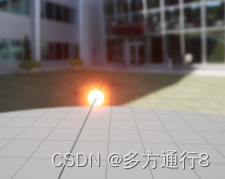
添加速度
我们可以添加一个速度,让粒子向上飘:
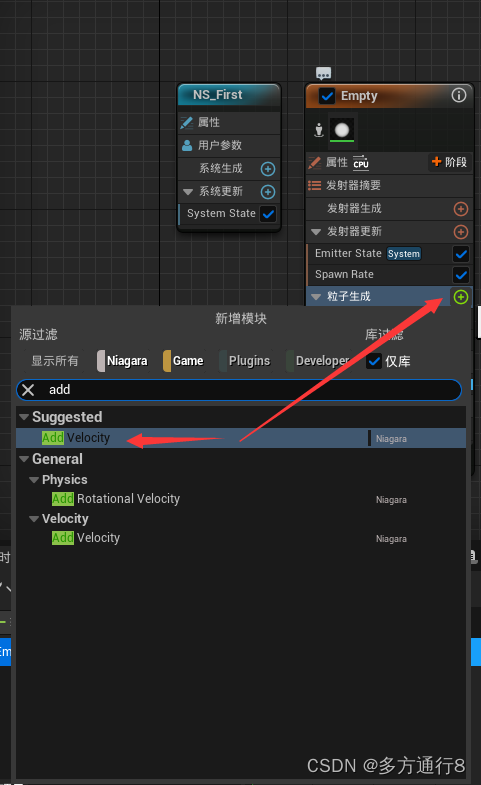
添加之后会发现出现了报错:
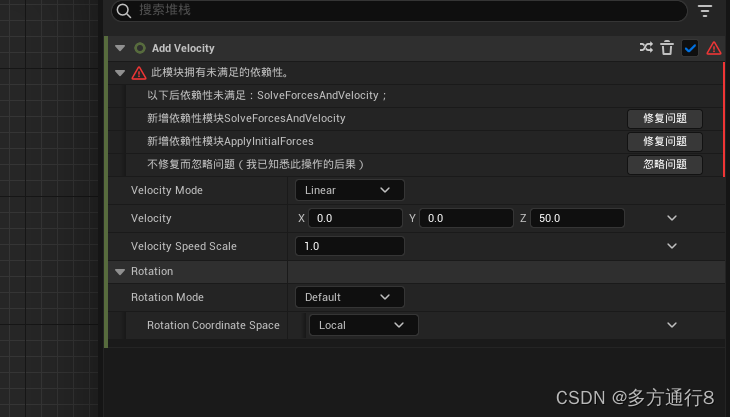
它需要的是依赖性模块,SolveForcesAndVelocity:
这个模块的名字其实已经写的很明白了:解算力和速度。
添加即可:

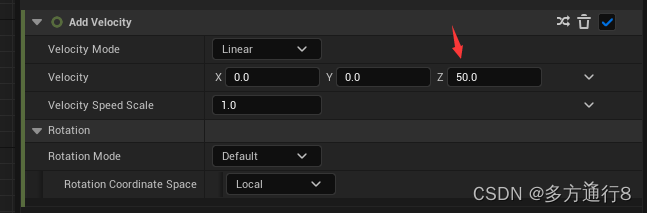
在z轴添加一个正向的50速度。
可以看见现在的粒子是一种向上飘的状态:
添加Noise力场
现在虽然粒子会向上飘,但是我们希望它在向上飘的过程中,可以有一种相对混乱的状态,所以我们可以对立场进行添加:
【为什么我们在粒子更新里面进行添加,而不是在粒子生成里面呢?】
【原因也很简单,因为粒子是在生成的时候会调用这个立场,而在更新中会持续的进行一个调用,就和蓝图中的begin和tick一样的原理。】
在生成中添加:
在生成中添加这个立场,那么会发生什么呢?
添加立场之后发生报错,缺少依赖,添加以后,再写下数值300,500:
效果:
可以发现,他们的飞向目标已经乱七八糟了:
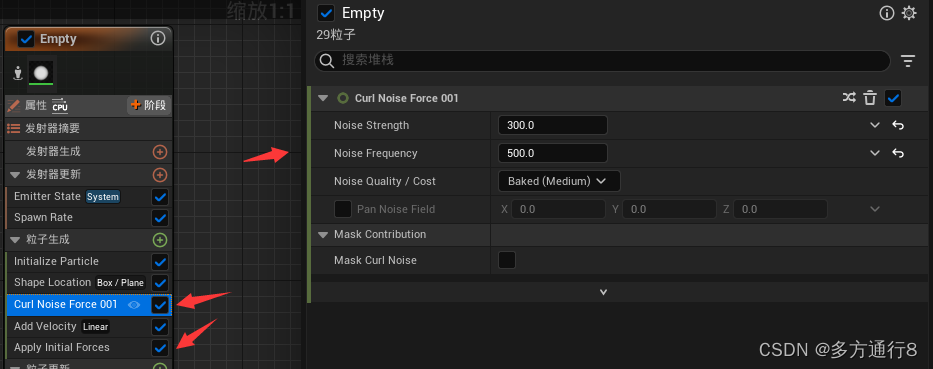
在更新中添加:
可以看到里面有很多的力场:

不过我们使用的是Cur Noise Force,这个立场是:添加到瞬态。使用旋度噪声场的力。在默认情况下,采样一个中等分辨率的烤平铺旋度噪声场,可以选择直接采样一个单纯形衍生的旋度函数,但会增加成本。

效果:
写下数值300,500:
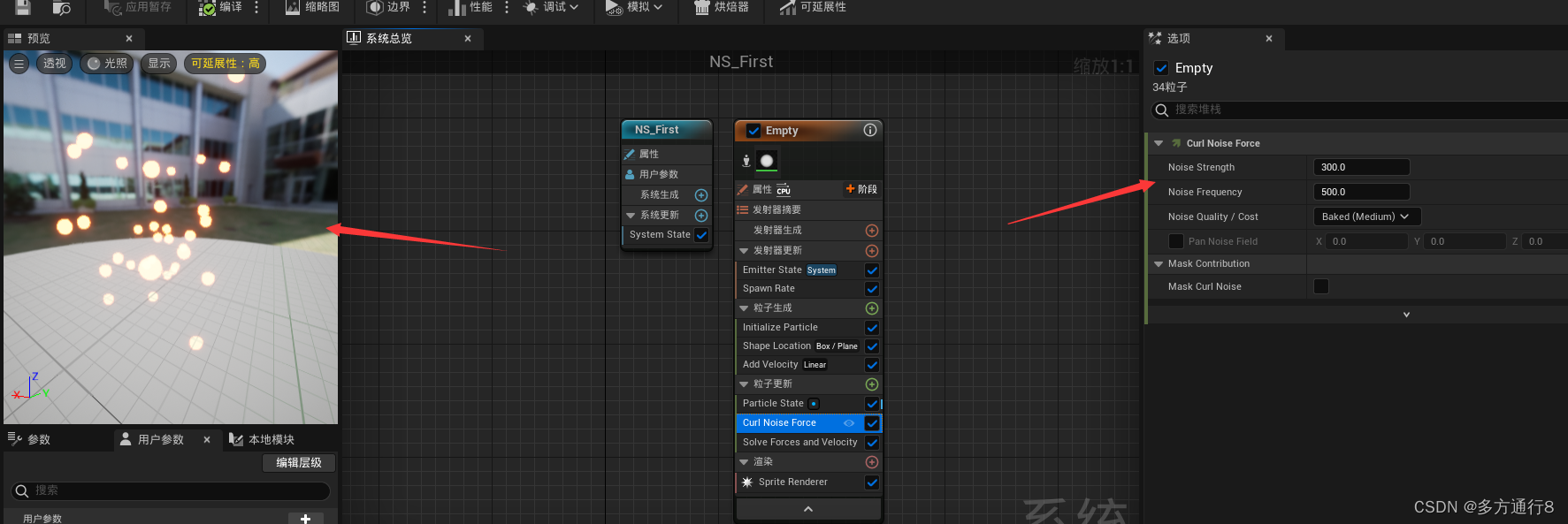
可以发现现在的粒子在向上的过程中产生了混乱的效果。
控制粒子过程的大小
粒子的大小,我们在上面就已经知道可以在开始的时候设置为固定或者随机。
而现在我们想要粒子可以在向上移动的过程中改变粒子的大小应该怎么做呢?
可以看见有对Mesh和对粒子的大小的控制,我们不选择跟随速度变换大小,而是Scale Sprite Size。
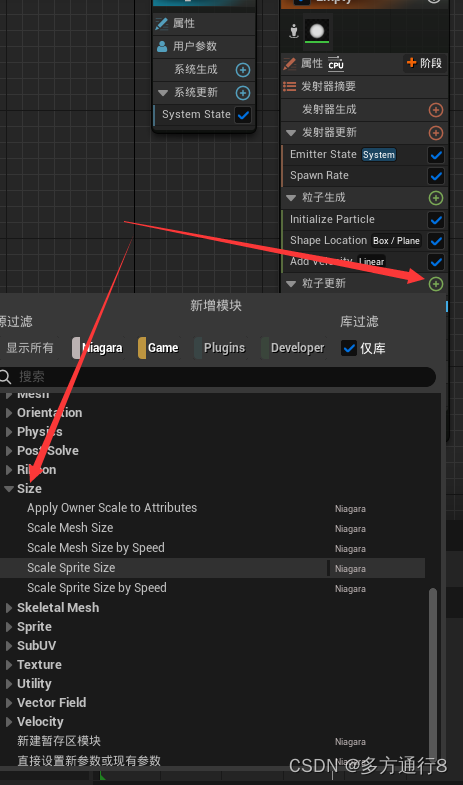
可以看到默认就给了一个均匀的曲线控制:

这种情况下,我们自然也是可以进行修改的:
一样是四种方式,大家可以都测试一下方法,我们现在就需要这个默认的即可。

我们有两个地方去调节这个曲线,一个是右边,一个是曲线窗口,而曲面窗口这里会告诉你,你选择的曲线是哪个发射器里面的哪个模块内部的哪个曲线。
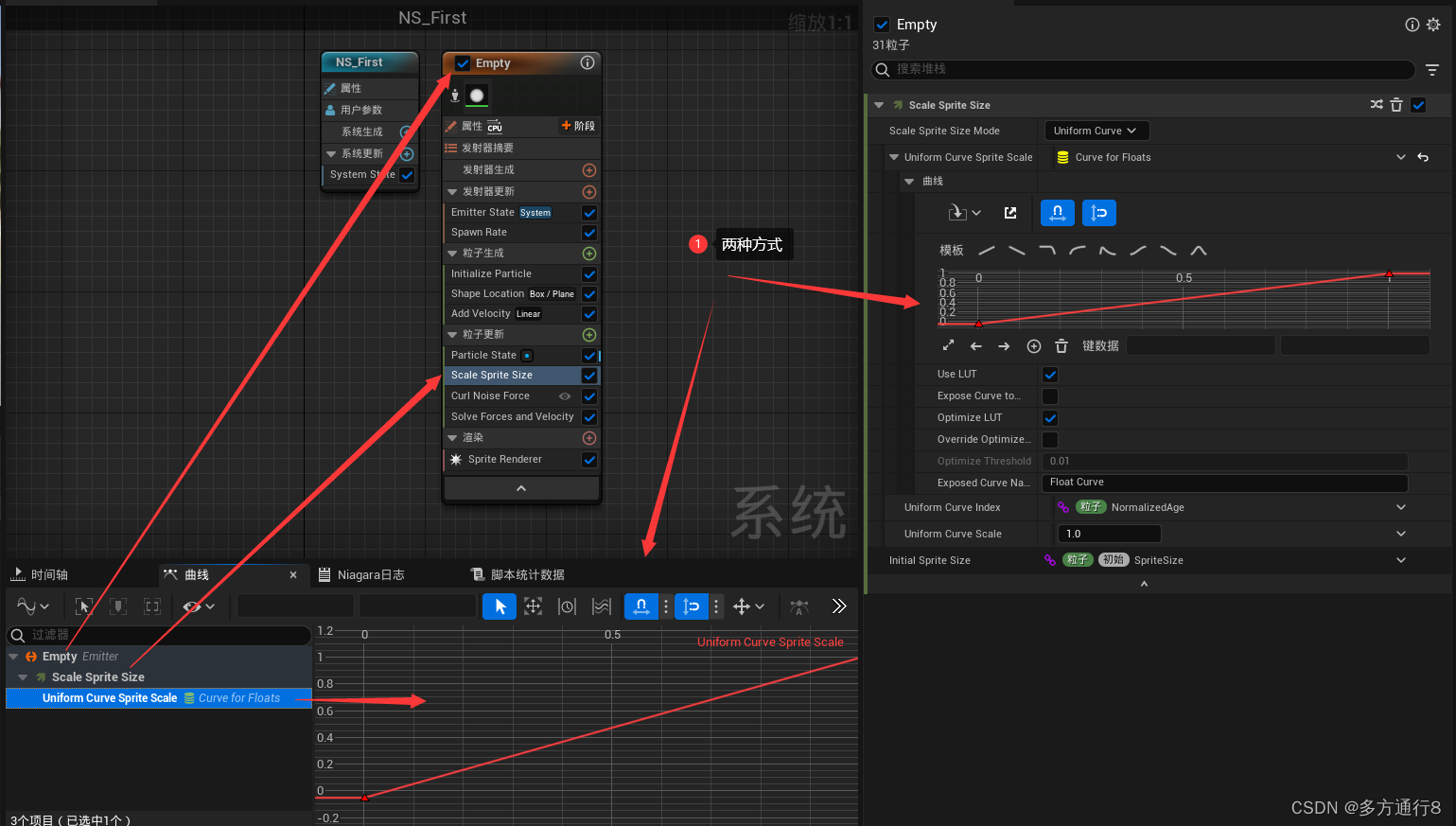
曲线中添加方式有两种,右键添加与中键。

调整的时候可以选择对其,或者自己去输入参数:
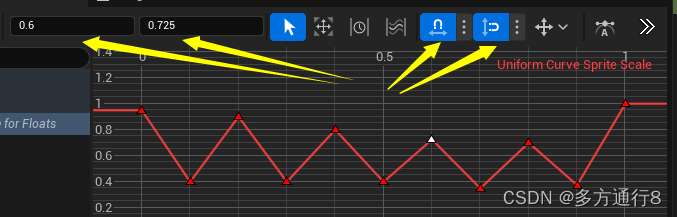

具体的效果可以自己去进行调节。
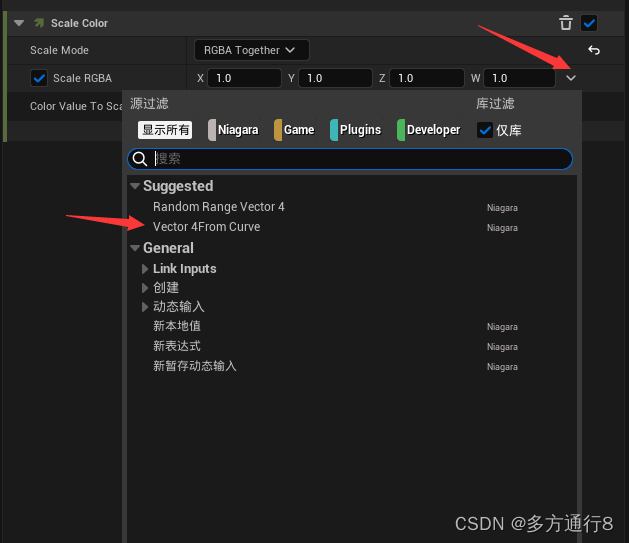
控制粒子过程的颜色
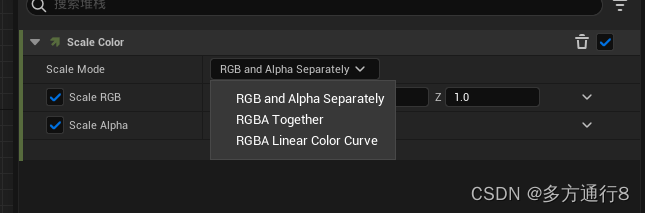
流程和之前一样,我们选择Scale Color:

选择之后,我的Scale Color在解算器的下面,我们将其拉到上面。
原因很简单,发射器的执行都是从上到下的,就和蓝图是从左到右一样。
我们的颜色要放到上面,否则可能导致结果不符合预期

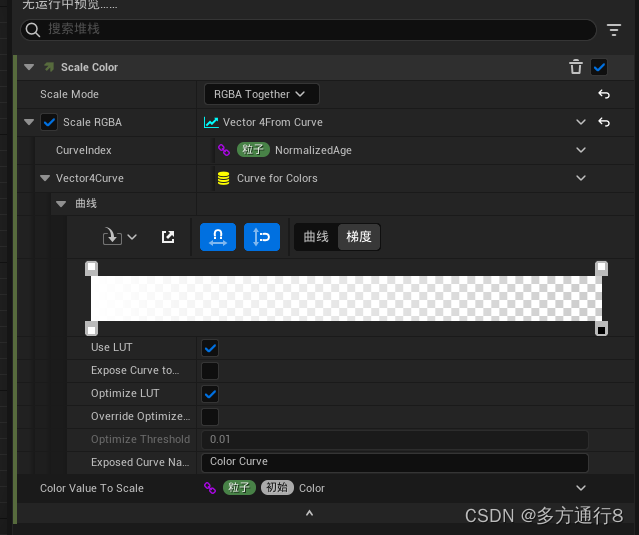
同样是3个选择,我们选择第二个,一起进行调节:
然后将固定的这个值给位曲线的方式:
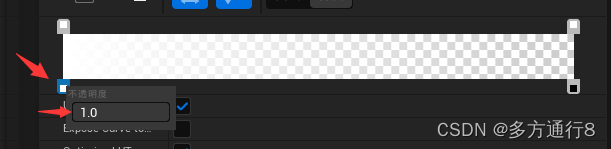
使用的方法和ps中一样,点击选择之后再点击一次即可,上面选择颜色,下面选择透明度。
按没有的地方则生成一个标。

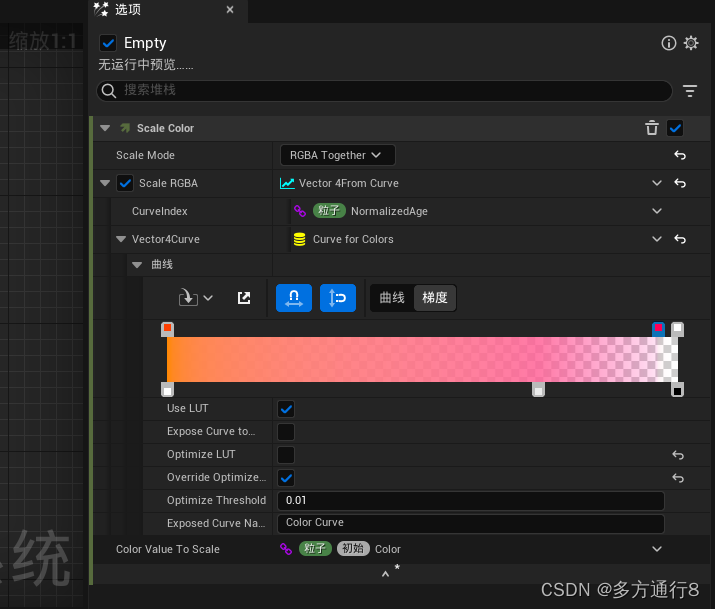
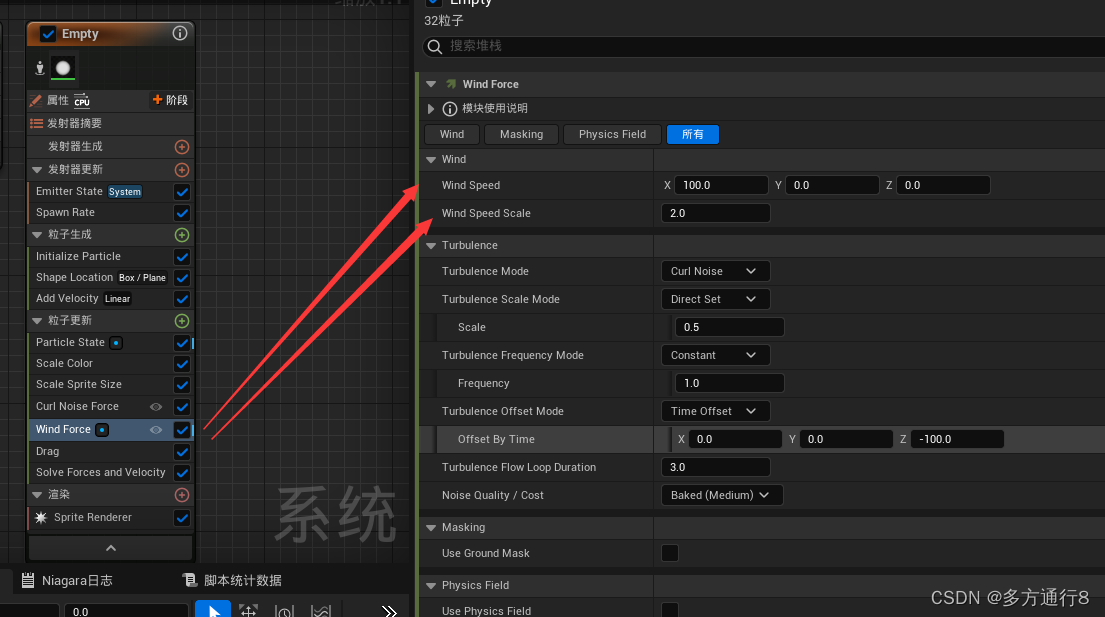
添加风的立场
添加之后会发现不知道为什么,仍然没有产生效果,哪怕将参数调的很大也是一样,这是因为我们没有添加重力,所以还需要添加一个重力:


修改参数:
结束
重力自己决定是否修改,然后可以看到效果已经有了。

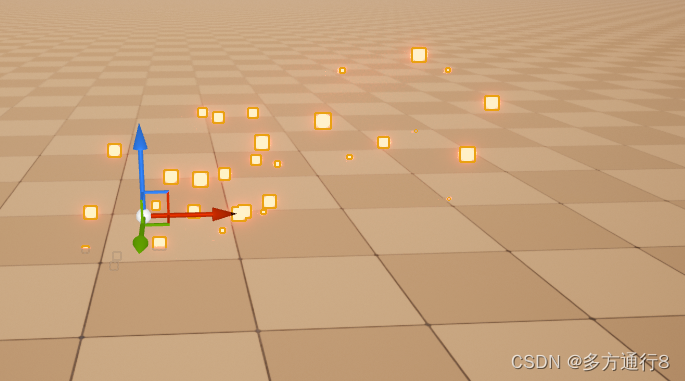
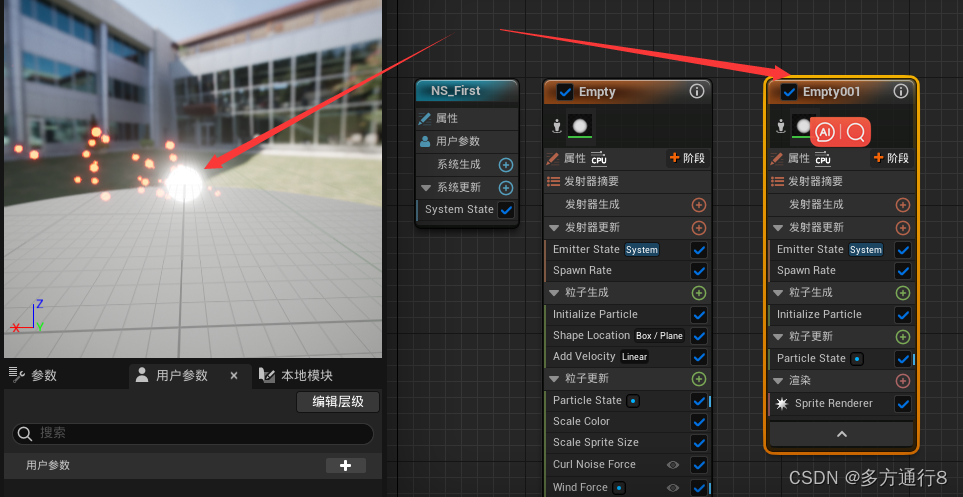
第一个粒子特效便完成了,当然如果想要在这个Niagara里面添加更多的特效,只需要添加发射器即可:
然后不论是做烟雾或者其他的效果都是如此。