【Linux】【驱动】第一个相对完整的驱动编写
- 续
- 1.驱动部分的代码
- 2 app 代码
- 3 操作相关的代码
续
这个章节会讲述去直接控制一个GPIO,高低电平。
因为linux不允许直接去操作寄存器,所以在操作寄存器的时候就需要使用到函数:ioremap 和iounmap
来作为寄存器的声明和注销
ioremap 做为地址的声明,如下图使用
CCM_CCGR1 = ioremap(0x20C406C, 4);
iounmap 作为取消声明。
iounmap(CCM_CCGR1);
1.驱动部分的代码
- 在函数的前面对寄存器的名称进行了说明,
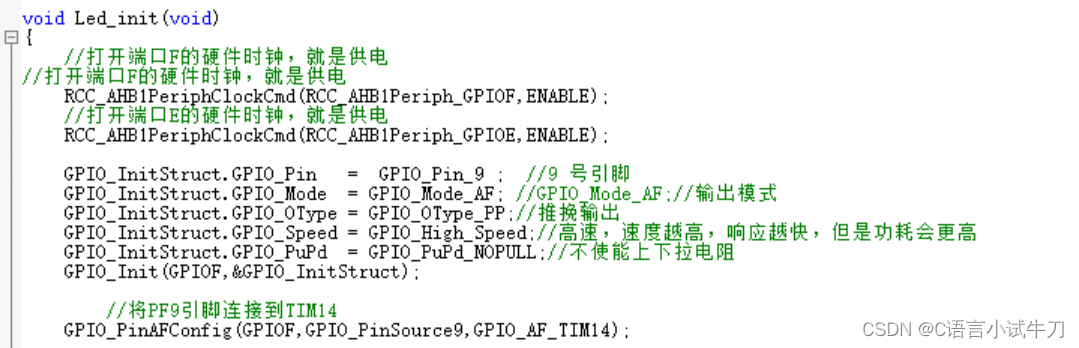
- misc_init 中实现对GPIO的配置, 使能 GPIO5,设置 GPIO5_IO03 用于 GPIO,设置 GPIO5_IO03 作为 output 引脚
- 在misc_write 中实现了对GPIO的控制
PS:此代码还有一些不完善的地方,所以在实际的使用中可能会出现一些异常,带之后改正
#include <linux/init.h>
#include <linux/module.h>
#include <linux/miscdevice.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>unsigned int *vir_gpio5_dr ;static volatile unsigned int *CCM_CCGR1 ;
static volatile unsigned int *IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3;
static volatile unsigned int *GPIO5_GDIR ;static volatile unsigned int *GPIO5_DR ;int misc_open(struct inode *inode, struct file *file)
{printk("misc_open\n");return 0;
}int misc_release(struct inode *inode, struct file *file)
{printk("misc_release\n");return 0;}ssize_t misc_read(struct file *file,char __user *ubuf,size_t size,loff_t *loff_t)
{char kbuf[512] = "haha";if(copy_to_user(ubuf,kbuf,strlen(kbuf))!=0){printk("error copying\n");return -1;}return 0;}ssize_t misc_write(struct file *file,const char __user *ubuf,size_t size,loff_t *loff_t)
{char kbuf[512] = {0}; if(copy_from_user(kbuf,ubuf,size)!= 0){printk("misc_write error\n");return -1;}printk("kbuf = %d\n",kbuf[0]);if(kbuf[0] == 1){*GPIO5_DR |=(1<<3);//设置GPIOprintk(" kbuff = 1\n");}else if(kbuf[0] == 0){*GPIO5_DR &= ~(1<<3);//设置GPIOprintk(" kbuff = 0\n");}return 0;}struct file_operations misc_fops = {.owner = THIS_MODULE,.open = misc_open,.release = misc_release,.read = misc_read,.write = misc_write
};struct miscdevice misc_dev =
{.minor = MISC_DYNAMIC_MINOR,.name = "hello_misc",.fops = &misc_fops
};//drivers for init
static int misc_init(void)
{unsigned int val;int ret = 0;ret = misc_register(&misc_dev);if(ret<0) {printk("misc_register is failed\n");return -1;}printk("misc registe is succeed \n");//vir_gpio5_dr = ioremap(GPIO5_DR,4);CCM_CCGR1 = ioremap(0x20C406C, 4);IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 = ioremap(0x2290014, 4);GPIO5_GDIR = ioremap(0x020AC000 + 0x4, 4);GPIO5_DR = ioremap(0x020AC000 + 0, 4);*CCM_CCGR1 |= (3<<30);//使能 GPIO5//设置 GPIO5_IO03 用于 GPIOval = *IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3;val &= ~(0xf);val |= (5);*IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 = val;//设置 GPIO5_IO03 作为 output 引脚*GPIO5_GDIR |= (1<<3);
/*if(vir_gpio5_dr==NULL){printk("vir_gpio5_dr ioremap error ");return -EBUSY;}*/printk("GPIO5_DR ioremap ok\n"); return 0;
}//drivers for exit
static void misc_exit(void)
{
//misc_deregister(&misc_dev);iounmap(CCM_CCGR1);iounmap(IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3);iounmap(GPIO5_GDIR);iounmap(GPIO5_DR);printk("misc exit \n");}module_init(misc_init);
module_exit(misc_exit);MODULE_LICENSE("GPL");
2 app 代码
- 通过atoi 函数实现对命令框指令的读写,
- 通过write来是线对buf数字的传递
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd;char buf[64] = {0};//fd = open(argv[1], O_RDONLY);fd = open("/dev/hello_misc", O_RDWR);if(fd < 0){perror("open error");return fd;}buf[0] = atoi(argv[1]);write(fd,buf,sizeof(buf));close(fd);return 0;
}
3 操作相关的代码
编译app 代码
arm-buildroot-linux-gnueabihf-gcc -o miscApp miscApp.c
编译驱动代码
make
清除驱动代码
make clean
挂载nfs
mount -t nfs -o nolock,vers=3 192.168.5.15:/home/book/nfs_rootfs /mnt
删除文件
rm -f + chrdevbase.ko
传递文件,将misc.ko 传到 /home/book/nfs_rootfs/
cp misc.ko /home/book/nfs_rootfs/
允许PrintK
echo "7 4 1 7"> /proc/sys/kernel/printk
安装驱动
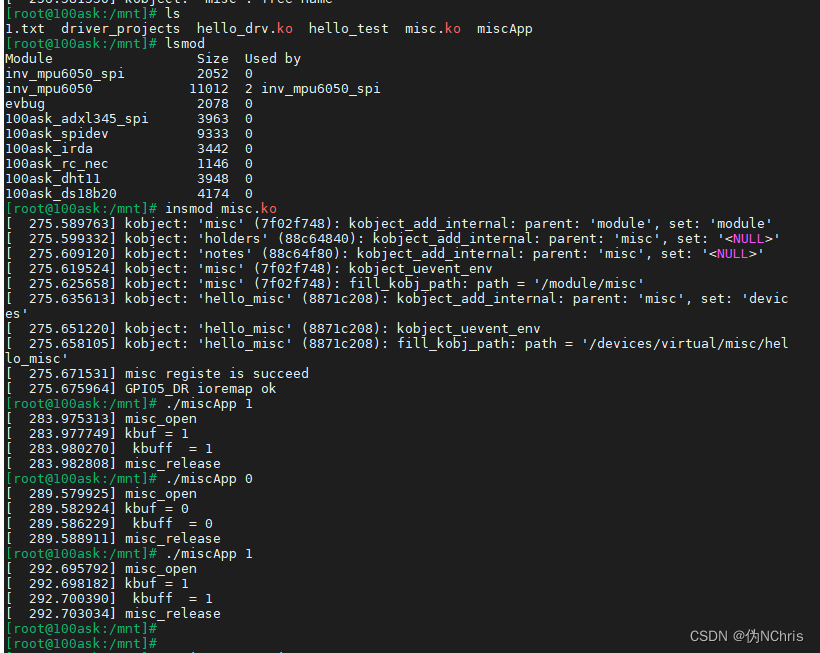
insmod misc.ko
列出驱动列表
lsmod
移除驱动
rmmod misc
给驱动传递数据1
./miscApp 1