1. 概述
本标定程序为整合现开发的高速车所有标定模块,可实现相机内参标定和激光、相机、前向毫米波
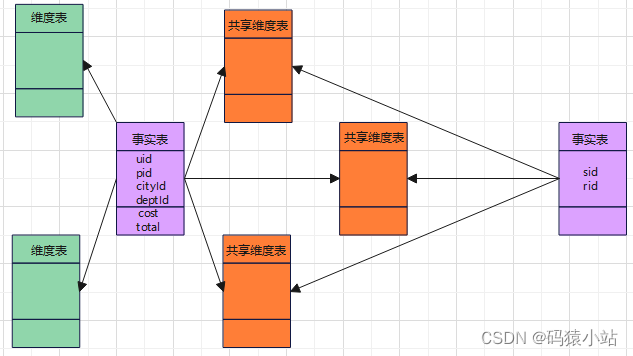
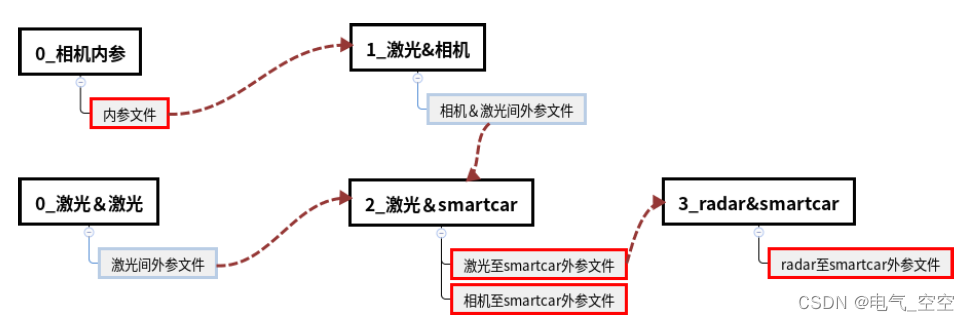
至车辆后轴中心标定,标定参数串联传递并提供可视化工具验证各个模块标定精度。整体标定流程如下,标定顺序为下图前标0-->1-->2-->3,相同编号标定顺序没有强制要求,其中红色框文件为最终所需标定文件,灰色框文件为中间流程所输出的间接调用文件。
1.1 安装方法
解压压缩文件,将highway_calibration复制到/home/trunk/目录下;highway_calibration
目录结构如下:(主目录以/home/trunk/为例)
#目录结构
highway_calibration/
install_isolated/
scripts/ #存放运行脚本
param/ #存放输入、输出、结果验证文件
input/
output/
tmp/
validation/
calibration_input.yaml
1.2 参数配置
按照1.1安装方法完成程序解压安装与环境适配,安装完成后目录结构为:
#目录结构
highway_calibration/
install_isolated/
scripts/ #存放运行脚本 前缀0-3为标定模块顺序 后缀0-2为某模块脚本依
次执行顺序
0_camera_calibration.sh #相机内参标定脚本
0_lidar_to_lidar_0.sh #雷达间外参标定脚本