基础回顾: 【IMX6ULL驱动开发学习】10.Linux I2C驱动实战:AT24C02驱动设计流程_阿龙还在写代码的博客-CSDN博客
【IMX6ULL驱动开发学习】11.Linux之SPI驱动_阿龙还在写代码的博客-CSDN博客
一、编写驱动
查看芯片手册,有两种DAC数据格式,12位和16位,这里选用16位数据(2字节)编写驱动。
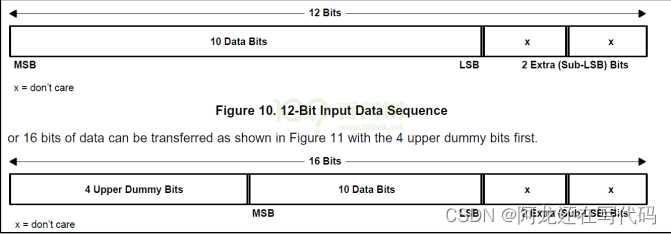
重点在驱动程序中写函数spi_drv_write的编写:spi_transfer结构体的构造,其中tx_buf存放发送数据,len表示发送长度(字节数),发起SPI同步传输
/*** spi_sync_transfer - 同步的SPI传输函数* @spi: 读写哪个设备* @xfers: spi_transfers数组,用来描述传输* @num_xfers: 数组项个数* 上下文: 能休眠的上下文才可以使用这个函数** 返回值: 0-成功, 负数-失败码*/
static inline int
spi_sync_transfer(struct spi_device *spi, struct spi_transfer *xfers,unsigned int num_xfers);static ssize_t spi_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{int err;short val;//2个字节unsigned char ker_buf[2];struct spi_transfer t;memset(&t, 0, sizeof(t));if (size != 2)return -EINVAL; /* copy_from_user */err = copy_from_user(&val, buf, size);val <<= 2;val &= 0x0fff;//DAC数据格式:高4位、低2位为0ker_buf[0] = val >> 8; //高8位ker_buf[1] = val; //低8位/* 初始化 spi_transfer */t.tx_buf = ker_buf;t.len = 2;err = spi_sync_transfer(g_spi, &t, 1);return size;
}完整驱动程序:spi_drv.c
#include "asm/cacheflush.h"
#include <linux/spi/spi.h>
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>/* 主设备号 */
static int major = 0;
static struct class *my_spi_class;static struct spi_device *g_spi;static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
struct fasync_struct *spi_fasync;/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t spi_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{// int err;// struct spi_transfer msgs[2];/* 初始化 spi_transfer */// static inline int// spi_sync_transfer(struct spi_device *spi, struct spi_transfer *xfers,// unsigned int num_xfers);/* copy_to_user */return 0;
}static ssize_t spi_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{int err;short val;//2个字节unsigned char ker_buf[2];struct spi_transfer t;memset(&t, 0, sizeof(t));if (size != 2)return -EINVAL; /* copy_from_user */err = copy_from_user(&val, buf, size);val <<= 2;val &= 0x0fff;//DAC数据格式:高4位、低2位为0ker_buf[0] = val >> 8; //高8位ker_buf[1] = val; //低8位/* 初始化 spi_transfer */t.tx_buf = ker_buf;t.len = 2;err = spi_sync_transfer(g_spi, &t, 1);return size;
}static unsigned int spi_drv_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);//return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;return 0;
}static int spi_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &spi_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations spi_drv_fops = {.owner = THIS_MODULE,.read = spi_drv_read,.write = spi_drv_write,.poll = spi_drv_poll,.fasync = spi_drv_fasync,
};static int spi_drv_probe(struct spi_device *spi)
{// struct device_node *np = client->dev.of_node;/* 记录spi_device */g_spi = spi;/* 注册字符设备 *//* 注册file_operations */major = register_chrdev(0, "100ask_spi", &spi_drv_fops); /* /dev/gpio_desc */my_spi_class = class_create(THIS_MODULE, "100ask_spi_class");if (IS_ERR(my_spi_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_spi");return PTR_ERR(my_spi_class);}device_create(my_spi_class, NULL, MKDEV(major, 0), NULL, "myspi"); /* /dev/myspi */return 0;
}static int spi_drv_remove(struct spi_device *spi)
{/* 反注册字符设备 */device_destroy(my_spi_class, MKDEV(major, 0));class_destroy(my_spi_class);unregister_chrdev(major, "100ask_spi");return 0;
}static const struct of_device_id myspi_dt_match[] = {{ .compatible = "100ask,spidev" },{},
};
static struct spi_driver my_spi_driver = {.driver = {.name = "100ask_spi_drv",.owner = THIS_MODULE,.of_match_table = myspi_dt_match,},.probe = spi_drv_probe,.remove = spi_drv_remove,
};static int __init spi_drv_init(void)
{/* 注册spi_driver */return spi_register_driver(&my_spi_driver);
}static void __exit spi_drv_exit(void)
{/* 反注册spi_driver */spi_unregister_driver(&my_spi_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(spi_drv_init);
module_exit(spi_drv_exit);MODULE_LICENSE("GPL");二、修改设备树
- 放在哪个SPI控制器下面
- DAC模块的片选引脚(查芯片手册)
- SPI频率
- compatible属性:用来寻址驱动程序
修改设备树:在内核目录下 vi arch/arm/boot/dts/100ask_imx6ull-14x14.dts
&ecspi1 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi1>;fsl,spi-num-chipselects = <2>;cs-gpios = <&gpio4 26 GPIO_ACTIVE_LOW>, <&gpio4 24 GPIO_ACTIVE_LOW>;status = "okay";dac: dac {compatible = "100ask,spidev";reg = <0>;spi-max-frequency = <1000000>;};
};- 在/home/book/100ask_imx6ull-sdk/Linux-4.9.88目录下重新编译设备树:make dtbs
- 复制到单板上,如下:
PC:
cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/开发板:
mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt
cp /mnt/100ask_imx6ull-14x14.dtb /boot
reboot- 进入系统固件目录下查看cd /sys/firmware/devicetree/base/

- 在系统 总线 i2c 设备下面查看是否有这个设备

spi0.0表示第0总线下第0个设备,前面0表示控制器,后面0表示控制器下面第0个设备。但还没有驱动程序。
- 挂载网络文件系统:mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt
- 装载驱动程序:insmod i2c_drv.ko
- 查看对应设备节点:ls /dev/myi2c -l

装载驱动程序前有设备无驱动文件,装载后有驱动文件:

- 查看APP用法并测试驱动程序