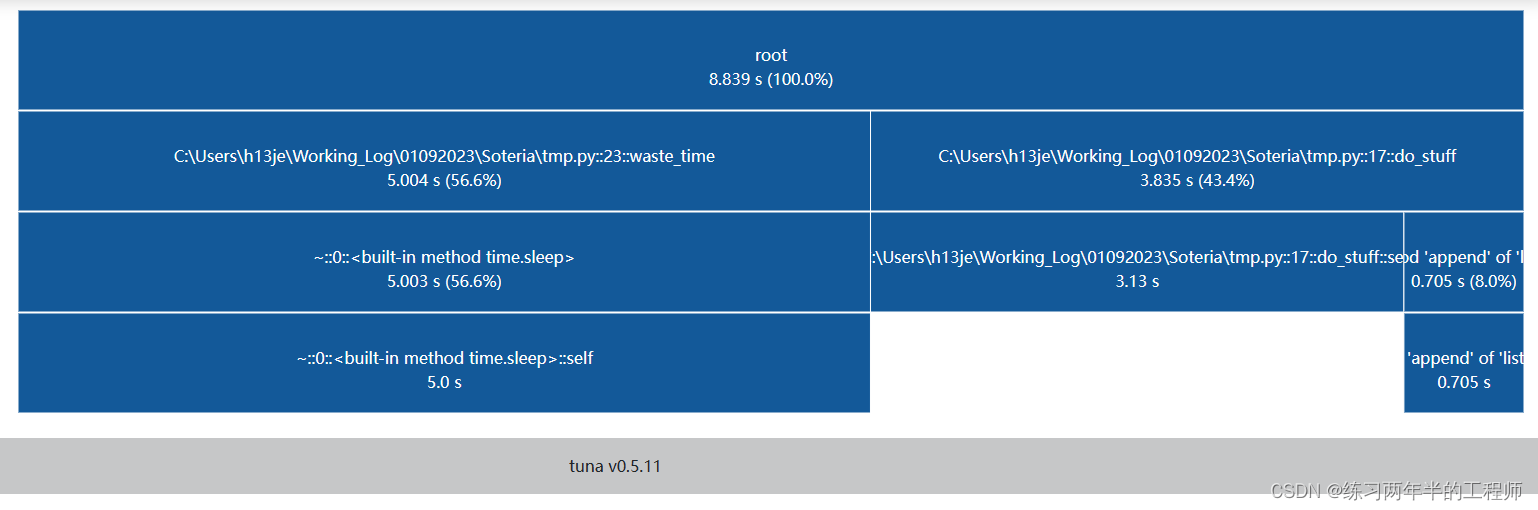
1.结论
onnx推理比torch快3倍, openvino比onnx快一丢丢。
| |](https://img-blog.csdnimg.cn/c9cd3b7ba3314772b927026c92e2bf3f.png)
yolov7.pt 转 onnx
python export.py --weights best_31.pt --grid --end2end --simplify --topk-all 10 --iou-thres 0.65 --conf-thres 0.65 --img-size 320 320 --max-wh 200
可以看到yolov7的 onnx是包括nms的
2.onnx推理
# encoding=utf-8
import cv2
cuda = False
w = "best_31.onnx"
img = cv2.imread('3.png')import cv2
import time
import requests
import random
import numpy as np
import onnxruntime as ort
from PIL import Image
from pathlib import Path
from collections import OrderedDict,namedtupleproviders = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
session = ort.InferenceSession(w, providers=providers)def letterbox(im, new_shape=(320, 320), color=(114, 114, 114), auto=True, scaleup=True, stride=32):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])if not scaleup: # only scale down, do not scale up (for better val mAP)r = min(r, 1.0)# Compute paddingnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingif auto: # minimum rectangledw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh paddingdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, r, (dw, dh)names = ['box', 'box1']
colors = {name:[random.randint(0, 255) for _ in range(3)] for i,name in enumerate(names)}
t1=time.time()
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)image = img.copy()
image, ratio, dwdh = letterbox(image, auto=False)
image = image.transpose((2, 0, 1))
image = np.expand_dims(image, 0)
image = np.ascontiguousarray(image)im = image.astype(np.float32)
im /= 255outname = [i.name for i in session.get_outputs()]inname = [i.name for i in session.get_inputs()]inp = {inname[0]:im}outputs = session.run(outname, inp)[0]ori_images = [img.copy()]for i,(batch_id,x0,y0,x1,y1,cls_id,score) in enumerate(outputs):image = ori_images[int(batch_id)]box = np.array([x0,y0,x1,y1])box -= np.array(dwdh*2)box /= ratiobox = box.round().astype(np.int32).tolist()cls_id = int(cls_id)score = round(float(score),3)name = names[cls_id]color = colors[name]name += ' '+str(score)cv2.rectangle(image,box[:2],box[2:],color,2)cv2.putText(image,name,(box[0], box[1] - 2),cv2.FONT_HERSHEY_SIMPLEX,0.75,[225, 255, 255],thickness=2)
print(time.time()-t1)
cv2.imshow('img',image)
cv2.waitKey(0)
你去看export.py会发现好像他没加上nms ,其实他是在end2end的时候加进去的
class End2End(nn.Module):'''export onnx or tensorrt model with NMS operation.'''def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None):super().__init__()device = device if device else torch.device('cpu')assert isinstance(max_wh,(int)) or max_wh is Noneself.model = model.to(device)self.model.model[-1].end2end = Trueself.patch_model = ONNX_TRT if max_wh is None else ONNX_ORTself.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device)self.end2end.eval()def forward(self, x):x = self.model(x)x = self.end2end(x)return x
其中报错找不到onnxsim
需要安装 pip install onnxsim
这个是把模型缩小的
3. openvino安装报错
安装的连接
https://docs.openvino.ai/2023.0/openvino_docs_install_guides_overview.html?ENVIRONMENT=DEV_TOOLS&OP_SYSTEM=WINDOWS&VERSION=v_2023_0_1&DISTRIBUTION=PIP
我们安装后报错
!!!!!DLL load failed while importing _pyopenvino
解决方法:
1.https://github.com/openvinotoolkit/openvino/issues/18151
他告诉我们要去pypi上看文档
https://pypi.org/project/openvino/
文档上说要安装MSVC runtime 还给了下载连接
https://aka.ms/vs/17/release/vc_redist.x64.exe
我安装了并重启电脑不行
- https://github.com/openvinotoolkit/openvino/issues/15403
他告诉我们要把 openvino的lib路径加在电脑的环境变量
Add the path \envs<your env
name>\Lib\site-packages\openvino\libs into your enviroment path.Reboot your terminal, and everything is ok…
3.重启电脑
4.openvino推理
这个代码是openvino提供的,不过他们把pt转onnx的时候没有加上nms。所以在代码里他们又加上的nms。这里我给去掉了。
4.1 onnx 转 openvino
# encoding=utf-8
from openvino.tools import mo
from openvino.runtime import serializemodel = mo.convert_model('best_tiny.onnx')
# serialize model for saving IR
serialize(model, 'best_tiny.xml')
4.2 openvino推理包括nms
# encoding=utf-8
import timeimport numpy as np
import torch
from PIL import Image
from utils.datasets import letterbox
from utils.plots import plot_one_boxdef preprocess_image(img0: np.ndarray):"""Preprocess image according to YOLOv7 input requirements.Takes image in np.array format, resizes it to specific size using letterbox resize, converts color space from BGR (default in OpenCV) to RGB and changes data layout from HWC to CHW.Parameters:img0 (np.ndarray): image for preprocessingReturns:img (np.ndarray): image after preprocessingimg0 (np.ndarray): original image"""# resizeimg = letterbox(img0,new_shape=(320,320), auto=False)[0]# Convertimg = img.transpose(2, 0, 1)img = np.ascontiguousarray(img)return img, img0def prepare_input_tensor(image: np.ndarray):"""Converts preprocessed image to tensor format according to YOLOv7 input requirements.Takes image in np.array format with unit8 data in [0, 255] range and converts it to torch.Tensor object with float data in [0, 1] rangeParameters:image (np.ndarray): image for conversion to tensorReturns:input_tensor (torch.Tensor): float tensor ready to use for YOLOv7 inference"""input_tensor = image.astype(np.float32) # uint8 to fp16/32input_tensor /= 255.0 # 0 - 255 to 0.0 - 1.0if input_tensor.ndim == 3:input_tensor = np.expand_dims(input_tensor, 0)return input_tensor# label names for visualization
NAMES = ['box', 'box1']# colors for visualization
COLORS = {name: [np.random.randint(0, 255) for _ in range(3)]for i, name in enumerate(NAMES)}from typing import List, Tuple, Dict
from utils.general import scale_coords, non_max_suppression
from openvino.runtime import Modeldef detect(model: Model, image_path, conf_thres: float = 0.25, iou_thres: float = 0.45, classes: List[int] = None, agnostic_nms: bool = False):"""OpenVINO YOLOv7 model inference function. Reads image, preprocess it, runs model inference and postprocess results using NMS.Parameters:model (Model): OpenVINO compiled model.image_path (Path): input image path.conf_thres (float, *optional*, 0.25): minimal accpeted confidence for object filteringiou_thres (float, *optional*, 0.45): minimal overlap score for remloving objects duplicates in NMSclasses (List[int], *optional*, None): labels for prediction filtering, if not provided all predicted labels will be usedagnostic_nms (bool, *optiona*, False): apply class agnostinc NMS approach or notReturns:pred (List): list of detections with (n,6) shape, where n - number of detected boxes in format [x1, y1, x2, y2, score, label]orig_img (np.ndarray): image before preprocessing, can be used for results visualizationinpjut_shape (Tuple[int]): shape of model input tensor, can be used for output rescaling"""output_blob = model.output(0)img = np.array(Image.open(image_path))preprocessed_img, orig_img = preprocess_image(img)input_tensor = prepare_input_tensor(preprocessed_img)t1 = time.time()predictions = torch.from_numpy(model(input_tensor)[output_blob])t2=time.time() - t1# predictions = predictions.unsqueeze(0)#pred = non_max_suppression(predictions, conf_thres, iou_thres, classes=classes, agnostic=agnostic_nms)return predictions, orig_img, input_tensor.shape,t2def draw_boxes(predictions: np.ndarray, input_shape: Tuple[int], image: np.ndarray, names: List[str], colors: Dict[str, int]):"""Utility function for drawing predicted bounding boxes on imageParameters:predictions (np.ndarray): list of detections with (n,6) shape, where n - number of detected boxes in format [x1, y1, x2, y2, score, label]image (np.ndarray): image for boxes visualizationnames (List[str]): list of names for each class in datasetcolors (Dict[str, int]): mapping between class name and drawing colorReturns:image (np.ndarray): box visualization result"""if not len(predictions):return image# Rescale boxes from input size to original image sizepredictions[:, 1:5] = scale_coords(input_shape[2:], predictions[:, 1:5], image.shape).round()# Write resultsfor index,x1,y1,x2,y2, cls, conf in predictions:label = f'{names[int(cls)]} {conf:.2f}'plot_one_box([x1,y1,x2,y2], image, label=label, color=colors[names[int(cls)]], line_thickness=1)return imagefrom openvino.runtime import Core
core = Core()
# read converted model
model = core.read_model('best_tiny.xml')
# load model on CPU device
compiled_model = core.compile_model(model, 'CPU')
t2=0
for i in range(100):boxes, image, input_shape,t = detect(compiled_model, '3.png')t2+=t
print(t2/100)
# image_with_boxes = draw_boxes(boxes, input_shape, image, NAMES, COLORS)
# # visualize results
# import cv2
# cv2.imshow('img',image_with_boxes)
# cv2.waitKey(0)
5.yolov5 在转onnx的时候加上nms
修改yolov5的 export.py 中代码如下
import torch.nn as nn
import random
class ORT_NMS(torch.autograd.Function):'''ONNX-Runtime NMS operation'''@staticmethoddef forward(ctx,boxes,scores,max_output_boxes_per_class=torch.tensor([100]),iou_threshold=torch.tensor([0.45]),score_threshold=torch.tensor([0.25])):device = boxes.devicebatch = scores.shape[0]num_det = random.randint(0, 100)batches = torch.randint(0, batch, (num_det,)).sort()[0].to(device)idxs = torch.arange(100, 100 + num_det).to(device)zeros = torch.zeros((num_det,), dtype=torch.int64).to(device)selected_indices = torch.cat([batches[None], zeros[None], idxs[None]], 0).T.contiguous()selected_indices = selected_indices.to(torch.int64)return selected_indices@staticmethoddef symbolic(g, boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold):return g.op("NonMaxSuppression", boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold)
class ONNX_ORT(nn.Module):'''onnx module with ONNX-Runtime NMS operation.'''def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=640, device=None):super().__init__()self.device = device if device else torch.device("cpu")self.max_obj = torch.tensor([max_obj]).to(device)self.iou_threshold = torch.tensor([iou_thres]).to(device)self.score_threshold = torch.tensor([score_thres]).to(device)self.max_wh = max_wh # if max_wh != 0 : non-agnostic else : agnosticself.convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],dtype=torch.float32,device=self.device)def forward(self, x):boxes = x[:, :, :4]conf = x[:, :, 4:5]scores = x[:, :, 5:]scores *= confboxes @= self.convert_matrixmax_score, category_id = scores.max(2, keepdim=True)dis = category_id.float() * self.max_whnmsbox = boxes + dismax_score_tp = max_score.transpose(1, 2).contiguous()selected_indices = ORT_NMS.apply(nmsbox, max_score_tp, self.max_obj, self.iou_threshold, self.score_threshold)X, Y = selected_indices[:, 0], selected_indices[:, 2]selected_boxes = boxes[X, Y, :]selected_categories = category_id[X, Y, :].float()selected_scores = max_score[X, Y, :]X = X.unsqueeze(1).float()return torch.cat([X, selected_boxes, selected_categories, selected_scores], 1)class End2End(nn.Module):'''export onnx or tensorrt model with NMS operation.'''def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None):super().__init__()device = device if device else torch.device('cpu')assert isinstance(max_wh,(int)) or max_wh is Noneself.model = model.to(device)# self.model.model[-1].export = Trueself.patch_model = ONNX_ORTself.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device)self.end2end.eval()def forward(self, x):x = self.model(x)x = self.end2end(x)return x
@try_export
def export_onnx(model, im, file, opset, dynamic, simplify, prefix=colorstr('ONNX:')):# YOLOv5 ONNX exportcheck_requirements('onnx>=1.12.0')import onnxLOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')f = opt.weights.replace('.pt', '.onnx') # filenameoutput_names = ['output0', 'output1'] if isinstance(model, SegmentationModel) else ['output0']if dynamic:dynamic = {'images': {0: 'batch', 2: 'height', 3: 'width'}} # shape(1,3,640,640)if isinstance(model, SegmentationModel):dynamic['output0'] = {0: 'batch', 1: 'anchors'} # shape(1,25200,85)dynamic['output1'] = {0: 'batch', 2: 'mask_height', 3: 'mask_width'} # shape(1,32,160,160)elif isinstance(model, DetectionModel):dynamic['output0'] = {0: 'batch', 1: 'anchors'} # shape(1,25200,85)model = End2End(model, opt.topk_all, opt.iou_thres, opt.conf_thres, 200, torch.device('cpu'))output_names = ['output']torch.onnx.export(model, im, f, verbose=False, opset_version=12, input_names=['images'],output_names=output_names,dynamic_axes=None)# Checksmodel_onnx = onnx.load(f) # load onnx modelonnx.checker.check_model(model_onnx) # check onnx model# # Metadata# d = {'stride': int(max(model.stride)), 'names': model.names}# for k, v in d.items():# meta = model_onnx.metadata_props.add()# meta.key, meta.value = k, str(v)# onnx.save(model_onnx, f)# Simplifyif simplify:try:# cuda = torch.cuda.is_available()# check_requirements(('onnxruntime-gpu' if cuda else 'onnxruntime', 'onnx-simplifier>=0.4.1'))import onnxsimLOGGER.info(f'{prefix} simplifying with onnx-simplifier {onnxsim.__version__}...')model_onnx, check = onnxsim.simplify(model_onnx)assert check, 'assert check failed'onnx.save(model_onnx, f)except Exception as e:LOGGER.info(f'{prefix} simplifier failure: {e}')return f, model_onnx
6. v5 v7 推理
def letterbox(img: Optional[np.arange],new_shape: List = (320, 320),color=(114, 114, 114),
) -> None:"""Resize and pad image while meeting stride-multiple constraintsArgs:img (_type_): _description_new_shape (tuple, optional): _description_. Defaults to (256, 256).color (tuple, optional): _description_. Defaults to (114, 114, 114).Returns:_type_: _description_"""shape = img.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])# Compute paddingnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeimg = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn img, r, (dw, dh)class Model:def __init__(self, model_path: str, cuda: bool) -> None:"""Load modelArgs:model_path (str): _description_cuda (str): _description_"""providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']self.session = ort.InferenceSession(model_path, providers=providers)def detect(self,img: Optional[np.array],shape: List[int] = None,) -> Optional[np.array]:"""检测Args:img (Optional[np.array]): 图片conf_threshold (str, optional): 置信度. Defaults to 0.25.shape (List[int], optional): 图片大小. Defaults to None.Returns:Optional[np.array]: 一个大的box和2个小的box为一组"""img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)image = img.copy()if shape is None:shape = [320, 320]# 图片缩放image, ratio, dwdh = letterbox(image, shape)# Convert# img=np.repeat(img[:, :, np.newaxis], 3, axis=2)image = image.transpose((2, 0, 1)) # 3x416x416image = np.expand_dims(image, 0)image = np.ascontiguousarray(image)im = image.astype(np.float32)im /= 255outname = ['output']inp = {'images': im}outputs = self.session.run(outname, inp)[0]return outputsif __name__ == "__main__":model = Model(model_path="weights/yolov5n.onnx", cuda=False)import osnames = ['box', 'box1']colors = {name: [random.randint(0, 255) for _ in range(3)] for i, name in enumerate(names)}for name in os.listdir("img"):img = cv2.imread(os.path.join("img", name))result = model.detect(img, shape=[320, 320])for datas in result:boxs = [] for data in datas:box = data[:4].round().astype(np.int32).tolist()cls_id = int(data[4])score = round(float(data[5]), 3)name = names[cls_id]color = colors[name]name += ' ' + str(score)cv2.rectangle(img, box[:2], box[2:], color, 2)cv2.putText(img, name, (box[0], box[1] - 2), cv2.FONT_HERSHEY_SIMPLEX, 0.75, [225, 255, 255],thickness=2)cv2.imshow("Lines", img)cv2.waitKey(0)








![[Android AIDL] --- AIDL原理简析](https://img-blog.csdnimg.cn/c4c179e727c3430eaefc770e4325f915.png)