文章目录
- 整数规划
- 割平面法
- 分支定界法
- 代码实现
整数规划
整数规划问题是优化变量必须取整数值的线性或非线性规划问题,不过,在大多数情况下,整数规划问题指的是整数线性规划问题。
其数学模型为
m i n f ( x ) = c T x s.t A x = b x ≥ 0 x i ∈ I , i ∈ I ⊂ { 1 , 2 , . . . , n } min \quad f(\pmb x)=\pmb c^T\pmb x \\ \text{s.t} \quad \pmb A\pmb x=\pmb b \\ \pmb x ≥ 0\\ x_i \in I, i\in I \subset\{1,2,...,n\} minf(x)=cTxs.tAx=bx≥0xi∈I,i∈I⊂{1,2,...,n}
特别地,如果 I = { 0 , 1 } I = \{0, 1\} I={0,1},上述模型也被称为0-1规划问题。
相比此前已经介绍的线性规划问题,整数规划问题其实就是多了组整数约束。鉴于两者如此紧密的关系,如下所示的线性规划问题被称为整数规划问题的松弛问题。
m i n f ( x ) = c T x s.t A x = b x ≥ 0 min \quad f(\pmb x)=\pmb c^T\pmb x \\ \text{s.t} \quad \pmb A\pmb x=\pmb b \\ \pmb x ≥ 0 minf(x)=cTxs.tAx=bx≥0
虽然看起来只是优化变量多了组整数条件的约束,但是在理论上,整数规划问题的求解已经不再是多项式复杂度了。
目前最常用的整数规划问题求解算法有两个:割平面法和分支定界法。不用被名字吓到,它们的本质都只是在单纯形法之外再额外增加一些算法逻辑,从而保证可以取到整数解。而这些算法逻辑,更像是算法框架,通过简单的实例就能描述清楚其背后的设计思想。
割平面法
本节通过求解如下的一个整数规划问题,来说明割平面法的算法原理。
m i n z = − 5 x 1 − 8 x 2 s.t x 1 + x 2 + x 3 = 6 5 x 1 + 9 x 2 + x 4 = 45 x 1 , x 2 , x 3 , x 4 ≥ 0 , 且只能取整数 min \quad z= -5x_1-8x_2 \\ \text{s.t} \quad x_1+x_2+x_3=6 \\ \nonumber 5x_1+9x_2+x_4=45 \\ \nonumber x_1,x_2,x_3,x_4≥0,且只能取整数 minz=−5x1−8x2s.tx1+x2+x3=65x1+9x2+x4=45x1,x2,x3,x4≥0,且只能取整数
首先计算其对应的松弛问题,得到最优解为
x 1 = 9 / 4 , x 2 = 15 / 4 x_1=9/4,x_2=15/4 x1=9/4,x2=15/4
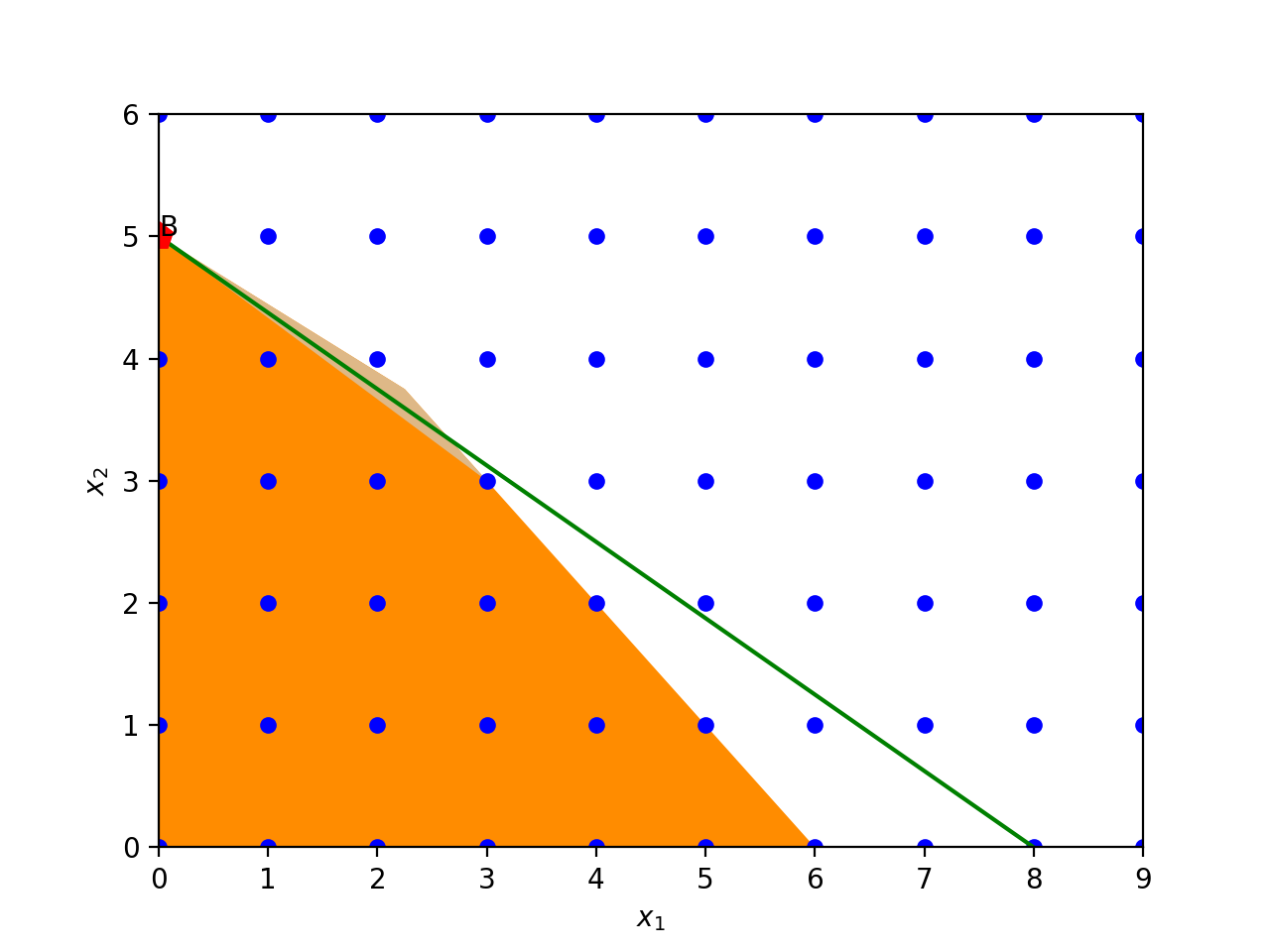
下图中,A点即为最优解。显然,该解并不满足优化变量为整数的约束。

此时,割平面法的思路是:先把A点附近的非整数区域从可行域中切掉,然后再重新计算最优解。“切”的数学描述可以表达为:给松弛问题增加一个约束。本实例中,约束的表达式为
0.75 x 3 + 0.25 x 4 ≥ 0.75 0.75x_3+0.25x_4≥0.75 0.75x3+0.25x4≥0.75
增加约束后,可行域如下图所示,重新求解得到最优解为
x 1 = 0 , x 2 = 5 x_1=0,x_2=5 x1=0,x2=5
该解虽然是求解松弛问题得到的最优解,但由于也满足整数条件的约束,所以也自然是原整数规划的最优解。
现在唯一的问题就只有:如何得到新增的约束表达式?接下来详细阐述。
切割前,最优解对应的单纯形表如下所示。单纯形表是基于单纯形法得来的,这篇文章给予了详细说明。本文不单开章节描述单纯形表的创建和迭代过程,主要是因为在实际应用时并不需要这些。
| -5 | -8 | 0 | 0 | |||
|---|---|---|---|---|---|---|
| C_b | 基 | b | x_1 | x_2 | x_3 | x_4 |
| -5 | x_1 | 9/4 | 1 | 0 | 9/4 | -1/4 |
| -8 | x_2 | 15/4 | 0 | 1 | -5/4 | 1/4 |
从单纯形表的 x 2 x_2 x2那一行,可知
15 4 = 0 x 1 + 1 x 2 − 5 4 x 3 + 1 4 x 4 \frac{15}{4}=0x_1+1x_2-\frac{5}{4}x_3+\frac{1}{4}x_4 415=0x1+1x2−45x3+41x4
将系数的整数部分和小数部分拆开,可得
3 + 3 4 = ( 0 + 0 ) x 1 + ( 1 + 0 ) x 2 + ( − 2 + 3 4 ) x 3 + ( 0 + 1 4 ) x 4 3+\frac{3}{4}=(0+0)x_1+(1+0)x_2+(-2+\frac{3}{4})x_3+(0+\frac{1}{4})x_4 3+43=(0+0)x1+(1+0)x2+(−2+43)x3+(0+41)x4
合并整数和小数部分
( 0 x 1 + 1 x 2 − 2 x 3 + 0 x 4 − 3 ) + ( 0 x 1 + 0 x 2 + 3 4 x 3 + 1 4 x 4 ) = 3 4 (0x_1+1x_2-2x_3+0x_4-3)+(0x_1+0x_2+\frac{3}{4}x_3+\frac{1}{4}x_4)=\frac{3}{4} (0x1+1x2−2x3+0x4−3)+(0x1+0x2+43x3+41x4)=43
等式左边第一项为整数部分,而等式右边为 [ 0 , 1 ] [0,1] [0,1]的小数,所以等式左边第二项的小数部分必然大于等于右边的值,即
( 0 x 1 + 0 x 2 + 3 4 x 3 + 1 4 x 4 ) ≥ 3 4 (0x_1+0x_2+\frac{3}{4}x_3+\frac{1}{4}x_4)≥\frac{3}{4} (0x1+0x2+43x3+41x4)≥43
该式即刚刚我们要添加的约束。
当然了,从图上可以看出,横纵坐标是 x 1 , x 2 x_1,x_2 x1,x2,但是约束条件是关于 x 3 , x 4 x_3,x_4 x3,x4,所以要做可视化的话,还需要转换一下
x 3 = 6 − x 1 − x 2 , x 4 = 45 − 5 x 1 − 9 x 2 x_3=6-x_1-x_2, \quad x_4 = 45 - 5x_1 - 9x_2 x3=6−x1−x2,x4=45−5x1−9x2
然后代入新添加的约束,变为
2 x 1 + 3 x 2 ≤ 15 2x_1+3x_2≤15 2x1+3x2≤15
这样就可以画出如上所示的图了。
至于为什么要选择 x 2 x_2 x2那一行来构造新的约束,这主要是因为,有经验表明,使用小数部分最大的那一行来构造约束,收敛会更快。
分支定界法
相比割平面法,分枝定界法的思路更容易理解。
以如下的实例为例:
m i n f ( x ) = − 10 x 1 − 20 x 2 s.t 5 x 1 + 8 x 2 ≤ 60 x 1 ≤ 8 x 2 ≤ 4 x 1 , x 2 ≥ 0 , 且只能取整数 min \quad f(\pmb x)= -10x_1-20x_2 \\ \text{s.t} \quad 5x_1+8x_2≤60 \\ x_1≤8 \\ x_2≤4 \\ x_1,x_2≥0,且只能取整数 minf(x)=−10x1−20x2s.t5x1+8x2≤60x1≤8x2≤4x1,x2≥0,且只能取整数
(1) 定义P为原整数规划问题,P0为其对应的松弛问题,最优解为
x 0 = ( 5.6 , 4 ) , f 0 = − 136 \pmb x_0=(5.6,4),f_0=-136 x0=(5.6,4),f0=−136
由于 x 0 \pmb x_0 x0不满足整数约束,所以该解并不是P的最优解。但是P的最优解 f ∗ f^\ast f∗肯定不会低于P0的最优解,所以 f 0 f_0 f0可以作为P的下界
f l b = − 136 f_{lb}=-136 flb=−136
此外,我们很容易发现, x = ( 0 , 0 ) \pmb x=(0,0) x=(0,0)是P的一个可行解,此时 f = 0 f=0 f=0,P的最优解 f ∗ f^\ast f∗不会高于该值,所以P的上界是
f u b = 0 f_{ub}=0 fub=0
(2) 在P0的最优解中,由于 x 1 = 5.6 x_1=5.6 x1=5.6,引入两个互斥的约束条件:
x 1 ≤ 5 , x 1 ≥ 6 x_1≤5,x_1≥6 x1≤5,x1≥6
将这两个约束分别加入P中,得到子问题P1和P2。显然,P的最优解和P1、P2最优解的更小者相同。
求解P1对应的松弛问题,最优解为
x 1 = ( 5 , 4 ) , f 1 = − 130 \pmb x_1=(5,4),f_1=-130 x1=(5,4),f1=−130
由于 x 1 \pmb x_1 x1为整数解,所以也是P1的最优解,上界 f u b f_{ub} fub可以修改为
f u b = f 1 = − 130 f_{ub}=f_1=-130 fub=f1=−130
由于P1已经得到整数最优解,所以P1不需要再继续被分支。
求解P2对应的松弛问题,最优解为
x 2 = ( 6 , 3.75 ) , f 2 = − 135 \pmb x_2=(6,3.75),f_2=-135 x2=(6,3.75),f2=−135
x 2 \pmb x_2 x2不满足整数条件,因此不是P2的最优解,但是 f ∗ f^\ast f∗不会低于 f 2 f_2 f2,所以可以更新下界
f l b = − 135 f_{lb}=-135 flb=−135
(3) 在P2的最优解中,由于 x 2 = 3.75 x_2=3.75 x2=3.75,继续引入两个互斥的约束条件
x 2 ≤ 3 , x 2 ≥ 4 x_2≤3,x_2≥4 x2≤3,x2≥4
将这两个约束分别加入P2中,得到子问题P3和P4。
先求解P4对应的松弛问题,无可行解,所以可以停止分枝。
再求解P3对应的松弛问题,最优解为
x 3 = ( 7.2 , 3 ) , f 3 = − 132 \pmb x_3=(7.2,3),f_3=-132 x3=(7.2,3),f3=−132
x 3 \pmb x_3 x3不满足整数条件,因此不是P3的最优解,但是 f ∗ f^\ast f∗不会低于 f 3 f_3 f3,所以可以继续更新下界
f l b = − 132 f_{lb}=-132 flb=−132
(4) 在P3的最优解中,由于 x 1 = 7.2 x_1=7.2 x1=7.2,继续引入两个互斥的约束条件
x 1 ≤ 7 , x 1 ≥ 8 x_1≤7,x_1≥8 x1≤7,x1≥8
将这两个约束分别加入P3中,得到子问题P5和P6。
求解P5对应的松弛问题,最优解为
x 5 = ( 7 , 3 ) , f 5 = − 130 \pmb x_5=(7,3),f_5=-130 x5=(7,3),f5=−130
由于 x 5 \pmb x_5 x5为整数解,所以也是P5的最优解,上界 f u b f_{ub} fub可以修改为
f ‾ = f 5 = − 130 \overline f=f_5=-130 f=f5=−130
此时,P5不需要再继续被分支。
求解P6对应的松弛问题,最优解为
x 6 = ( 8 , 2.5 ) , f 6 = − 130 \pmb x_6=(8,2.5),f_6=-130 x6=(8,2.5),f6=−130
x 6 \pmb x_6 x6不满足整数条件,但是 f 6 f_6 f6并不小于当前上界 f u b f_{ub} fub,所以该分支是“枯枝”,需要剪枝。
结合P5和P6,下界可以更新为
f l b = − 130 f_{lb}=-130 flb=−130
此时,我们发现
f u b = f l b = − 130 f_{ub}=f_{lb}=-130 fub=flb=−130
所以该问题的最优解为
x 1 = ( 5 , 4 ) 或 x 5 = ( 7 , 3 ) \pmb x_1=(5,4)或\pmb x_5=(7,3) x1=(5,4)或x5=(7,3)
对应的目标函数值为
f ∗ = − 130 f^\ast=-130 f∗=−130
分支定界的全过程可以参考下图。
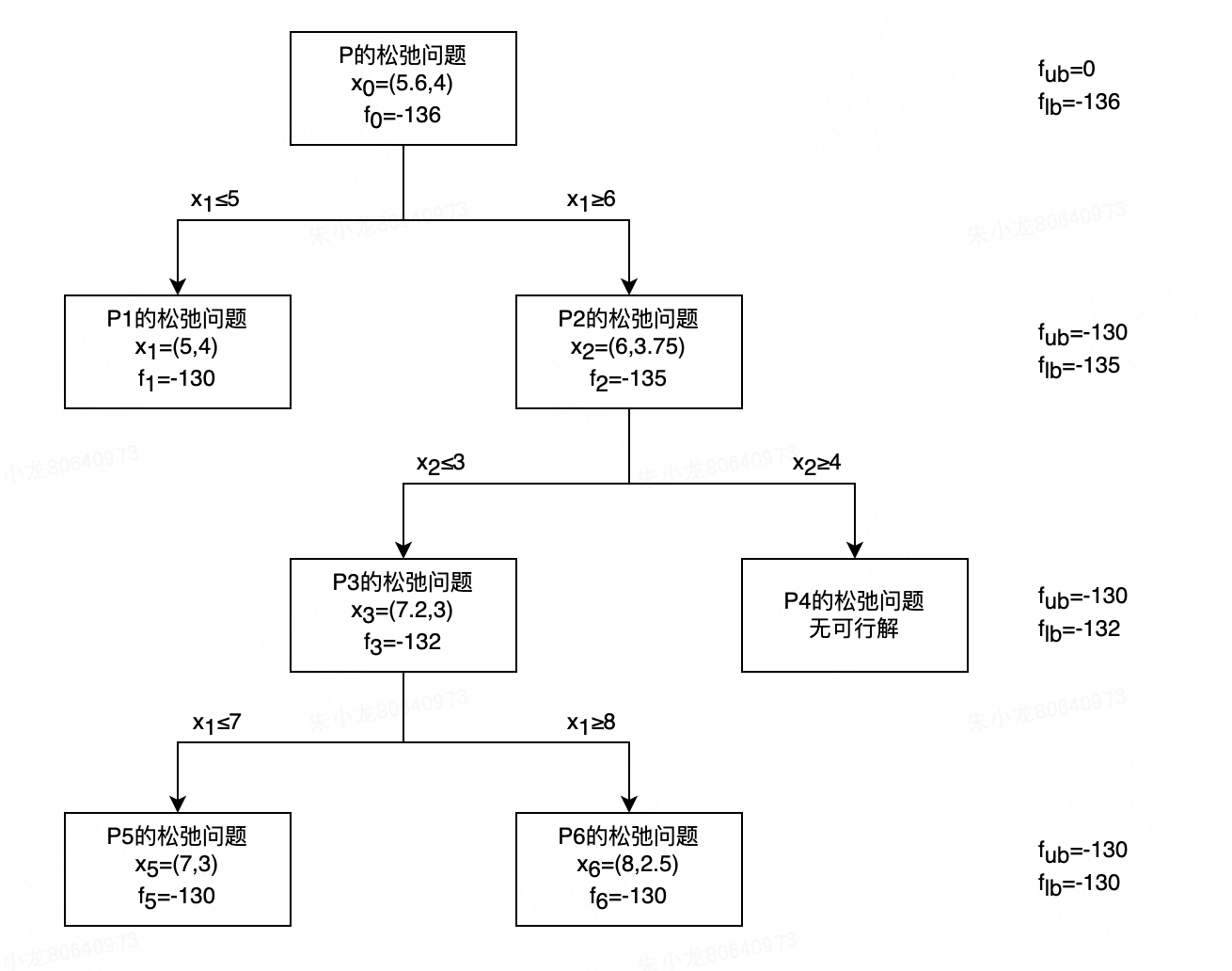
总的来说,割平面法和分支定界法都是先计算原问题对应的松弛问题,然后判断松弛问题的最优解是否也满足整数约束,如果满足,那么皆大欢喜;反之,割平面法会通过增加约束的方式来改进松弛问题的可行域,以期达到松弛问题最优解亦为原问题最优解的目标;而分支定界法则利用分解技术,将原问题分解为若干个子问题并分别计算,然后基于子问题的求解结果持续更新原问题的上下界,直至两者相等。
代码实现
虽然割平面法和分支定界法的步骤看起来挺多的,但好在,求解器已经帮我们做好了集成的工作,所以我们可以直接调用现成的求解器来求解所遇到的整数规划问题。
基于Python调用ortools求解整数规划问题的代码,和此前介绍的线性规划代码的唯一不同点在于:整数规划中优化变量的定义是solver.IntVar,而线性规划中的定义方式是solver.NumVar。
以下是上一节整数规划问题的求解代码。
from ortools.linear_solver import pywraplpif __name__ == '__main__':# 声明ortools求解器,使用SCIP算法solver = pywraplp.Solver.CreateSolver('SCIP')# 优化变量x1 = solver.IntVar(0, 8, 'x1')x2 = solver.IntVar(0, 4., 'x2')# 目标函数solver.Minimize(-10 * x1 - 20 * x2)# 约束条件solver.Add(5 * x1 + 8 * x2 <= 60)# 模型求解status = solver.Solve()# 模型求解成功, 打印结果if status == pywraplp.Solver.OPTIMAL:# 变量最优解print('x1: {}, x2: {}'.format(x1.solution_value(), x2.solution_value()))# 最优目标函数值print('best_f =', solver.Objective().Value())else:print('not converge.')运行代码后,可以得到最优解如下。显然,该解和上一节推演的结果是一致的。
x1: 5.0, x2: 4.0
best_f = -129.99999999999997