Yolov5 中添加注意力机制 CBAM
- 1. CBAM
- 1.1 Channel Attention Module
- 1.2 Spatial Attention Module
- 1.3 Channel attention 和 Spatial attention 如何去使用
- 2. 在Yolov5中添加CBAM模块
- 2.1 修改common.py 文件
- 2.2 修改yolo.py 文件
- 2.3 修改网络配置yolov5x-seg.yaml文件
- 3. 训练
- 3.1 未添加CBAM之前的结果
- 3.2 添加CBAM之后的结果
- 4. 参考文章
1. CBAM
CBAM(Convolutional Block Attention Module)是一种注意力机制,它通过关注输入数据中的重要特征来增强卷积神经网络(CNN)的性能。CBAM的原理可以分为两个部分:空间注意力模块和通道注意力模块。
- 空间注意力模块:该模块关注输入特征图的每个空间位置的重要性。它首先对特征图的每个通道进行全局平均池化,然后使用1x1卷积将通道数调整为与输入特征图相同的大小。接着,使用sigmoid激活函数对每个空间位置的激活进行归一化,最后使用全局最大池化获取最重要的空间信息。
- 通道注意力模块:该模块关注每个通道对最终输出贡献的重要性。它首先对每个通道的特征进行全局平均池化,然后使用1x1卷积将通道数调整为与输入特征图相同的大小。接着,使用sigmoid激活函数对每个通道的激活进行归一化,最后使用全局最大池化获取最重要的通道信息。
CBAM将这两个注意力模块嵌入到CNN的卷积层之间,以增强网络对重要特征的关注度。实验表明,CBAM可以显著提高CNN的性能,特别是在图像分类、目标检测和语义分割等任务中。
1.1 Channel Attention Module
先上一下代码:
class ChannelAttention(nn.Module):def __init__(self, in_planes, ratio=16):super(ChannelAttention, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1)self.max_pool = nn.AdaptiveMaxPool2d(1)self.fc = nn.Sequential(nn.Conv2d(in_planes, in_planes // 16, 1, bias=False),nn.ReLU(),nn.Conv2d(in_planes // 16, in_planes, 1, bias=False))self.sigmoid = nn.Sigmoid()def forward(self, x):avg_out = self.fc(self.avg_pool(x))max_out = self.fc(self.max_pool(x))out = avg_out + max_outreturn self.sigmoid(out)
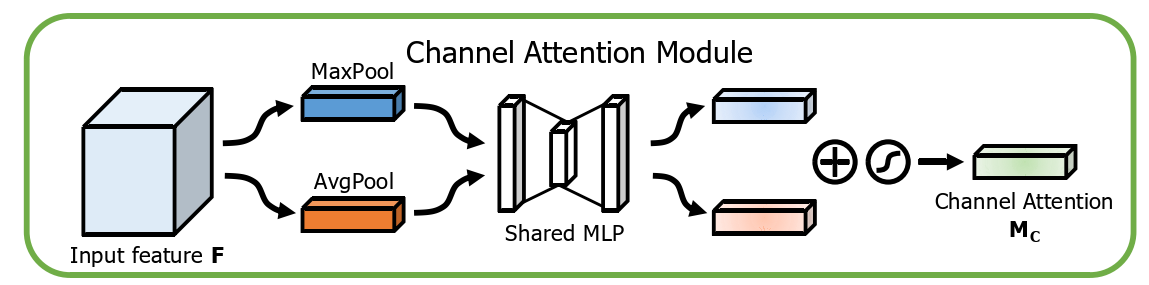
Channel Attention的流程为:
- 输入一组特征;
- 对特征在空间维度上进行MaxPool,即最大值池化;
- 对特征在空间维度上进行AvgPool,即平局池化;
- 经过池化后的两组特征分别进入MLP网络中,分别得到两组新的特征;
- 然后将两组新的特征进行相应元素一一相加,再通过激活函数,就得到一组所需要的新的特征;
channel attention 主要关注输入特征中的“what”,即在这么多特征中,哪些才是有意义的部分。
MLP的作用是让特征向量不同维度之间做充分的交叉,让模型能够抓取到更多的非线性特征和组合特征的信息
其数学表达式如下:
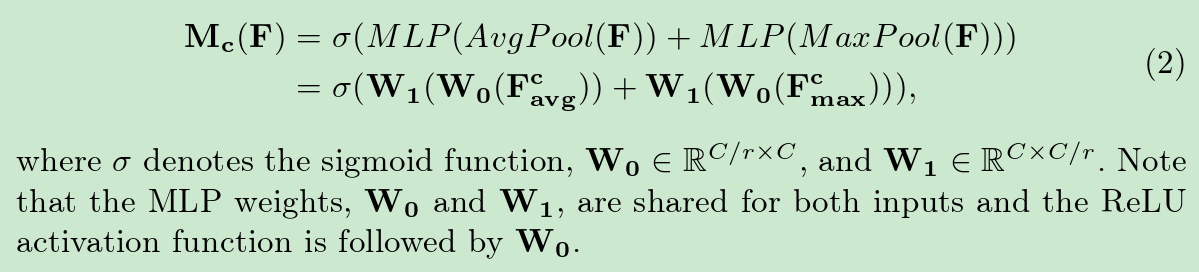
1.2 Spatial Attention Module
先上一下代码:
class SpatialAttention(nn.Module):def __init__(self, kernel_size=7):super(SpatialAttention, self).__init__()self.conv1 = nn.Conv2d(2, 1, kernel_size, padding=kernel_size//2, bias=False)self.sigmoid = nn.Sigmoid()def forward(self, x):avg_out = torch.mean(x, dim=1, keepdim=True)max_out, _ = torch.max(x, dim=1, keepdim=True)x = torch.cat([avg_out, max_out], dim=1)x = self.conv1(x)return self.sigmoid(x)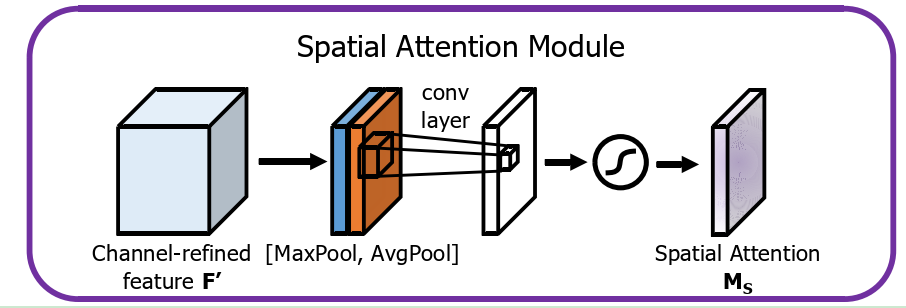
Spatial Attention的流程为:
- 输入一组特征;
- 对特征在通道维度上进行MaxPool,即最大值池化;
- 对特征在通道维度上进行AvgPool,即平局池化;
- 然后将两组特征进行concatenate组成新的特征;
- 将新的特征送入卷积,得到2D空间注意力特征图;
- 最后通过激活函数得到需要的特征;
spatial attention 主要关注输入特征中的“where”,即在所有特征中,哪些部分需要去关注。
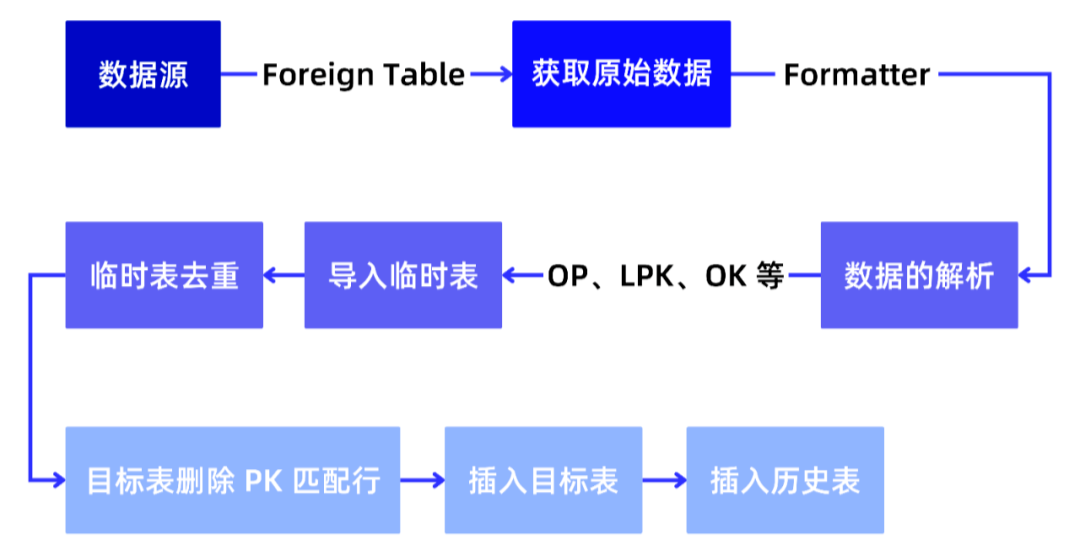
1.3 Channel attention 和 Spatial attention 如何去使用
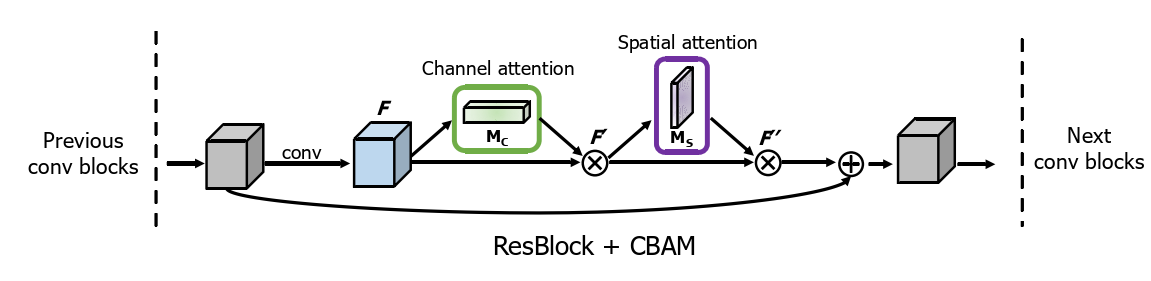
从上图中可以看到,前面的卷积神经网络提前特征后,分别进行两个通道注意力计算,两个通道可以并行也可以串行,但是原作者在实验中发现,串行且channel在spatial之前,性能会更好。每个注意出来后,都需要与输入进行一次对应元素的点乘;
其表达式如下:

2. 在Yolov5中添加CBAM模块
参考文章如下:https://blog.csdn.net/qq_27353621/article/details/125603799
2.1 修改common.py 文件
路径:models/common.py
在common.py的尾部添加如下代码,即Channel Attention 模块、Spatial Attention模块、CBAMC3模块
class ChannelAttention(nn.Module):def __init__(self, in_planes, ratio=16):super(ChannelAttention, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1)self.max_pool = nn.AdaptiveMaxPool2d(1)self.f1 = nn.Conv2d(in_planes, in_planes // ratio, 1, bias=False)self.relu = nn.ReLU()self.f2 = nn.Conv2d(in_planes // ratio, in_planes, 1, bias=False)self.sigmoid = nn.Sigmoid()def forward(self, x):avg_out = self.f2(self.relu(self.f1(self.avg_pool(x))))max_out = self.f2(self.relu(self.f1(self.max_pool(x))))out = self.sigmoid(avg_out + max_out)return torch.mul(x, out)class SpatialAttention(nn.Module):def __init__(self, kernel_size=7):super(SpatialAttention, self).__init__()assert kernel_size in (3, 7), 'kernel size must be 3 or 7'padding = 3 if kernel_size == 7 else 1self.conv = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False)self.sigmoid = nn.Sigmoid()def forward(self, x):avg_out = torch.mean(x, dim=1, keepdim=True)max_out, _ = torch.max(x, dim=1, keepdim=True)out = torch.cat([avg_out, max_out], dim=1)out = self.sigmoid(self.conv(out))return torch.mul(x, out)class CBAMC3(nn.Module):# CSP Bottleneck with 3 convolutionsdef __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansionsuper(CBAMC3, self).__init__()c_ = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c1, c_, 1, 1)self.cv3 = Conv(2 * c_, c2, 1)self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])self.channel_attention = ChannelAttention(c2, 16)self.spatial_attention = SpatialAttention(7)# self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)])def forward(self, x):# 将最后的标准卷积模块改为了注意力机制提取特征return self.spatial_attention(self.channel_attention(self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))))
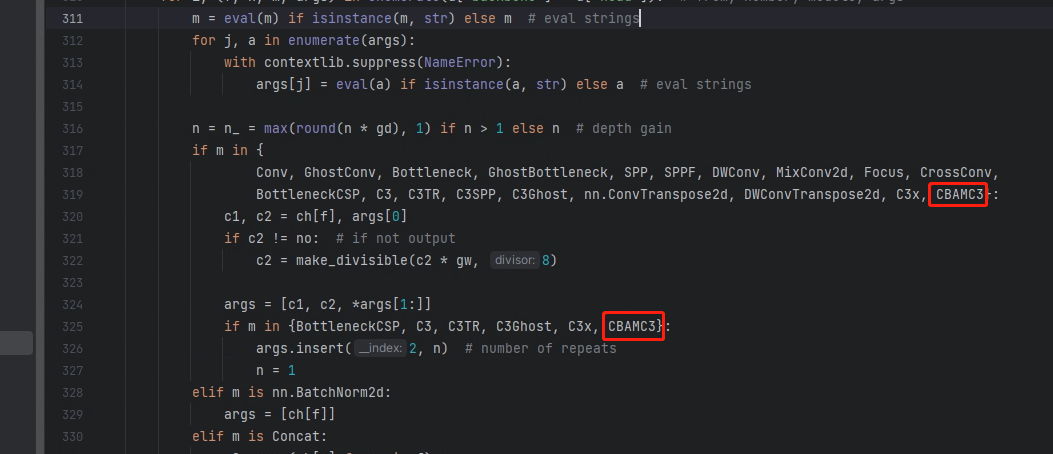
2.2 修改yolo.py 文件
路径:models/yolo.py
修改如下
2.3 修改网络配置yolov5x-seg.yaml文件
路径:models/segment/yolov5x-seg.yaml
将C3替换为CBAMC3
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license# Parameters
nc: 7 # number of classes
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, CBAMC3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, CBAMC3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, CBAMC3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, CBAMC3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
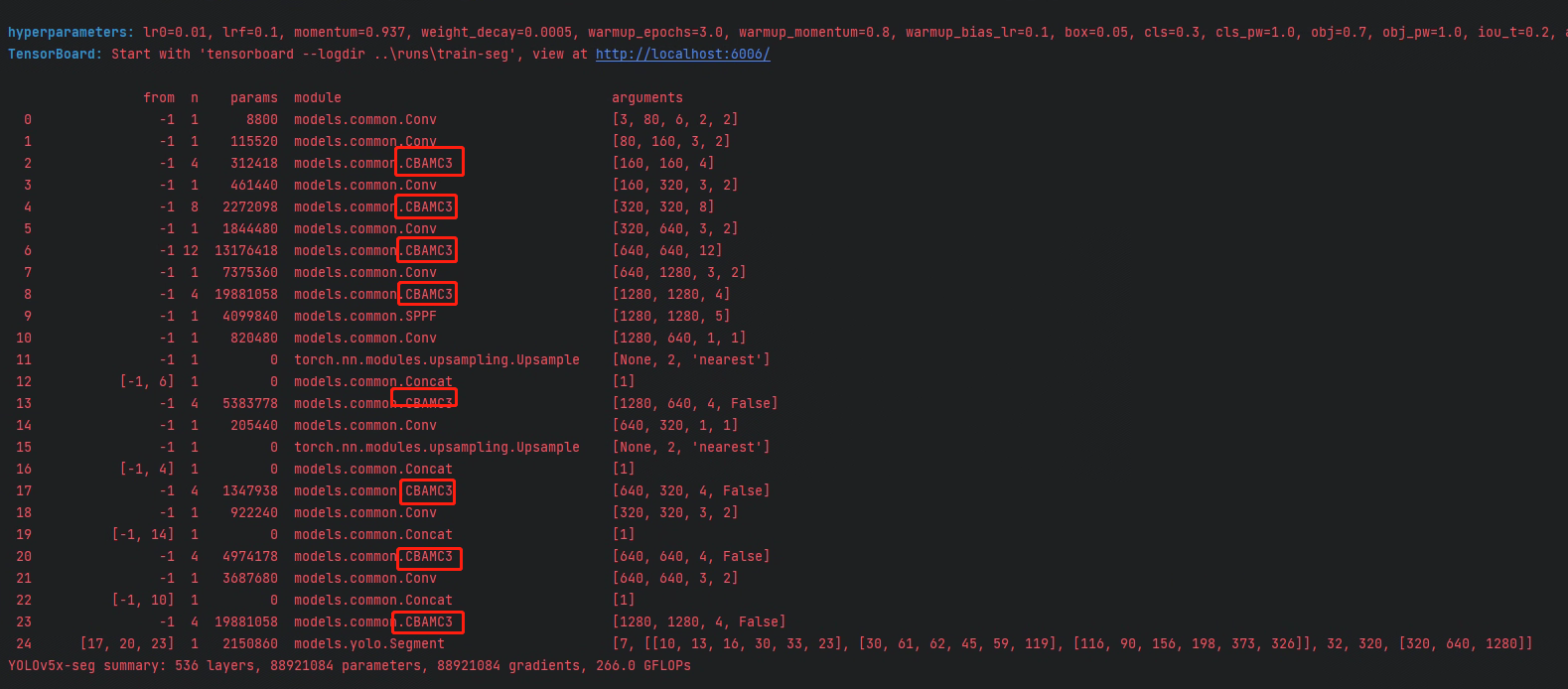
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, CBAMC3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, CBAMC3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, CBAMC3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, CBAMC3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Segment, [nc, anchors, 32, 256]], # Detect(P3, P4, P5)]上面的就算添加完了,接着验证下网络是否添加成功。
3. 训练
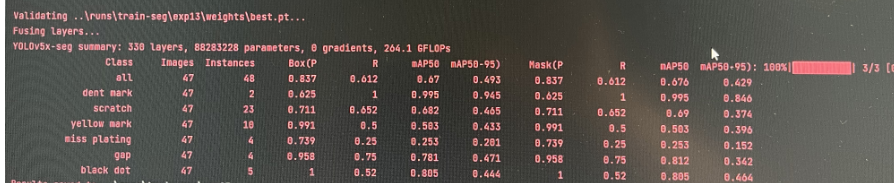
3.1 未添加CBAM之前的结果
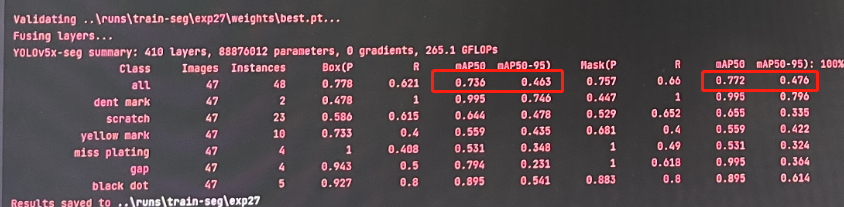
3.2 添加CBAM之后的结果
如果运行之后的网络输出中,出现CBAMC3,则说明添加成功,下面就是等待训练的结果。
结果出来之后,确实会比之前的结果好一点。
4. 参考文章
https://blog.csdn.net/qq_27353621/article/details/125603799
https://zhuanlan.zhihu.com/p/101590167
https://aistudio.baidu.com/projectdetail/1655497
https://github.com/luuuyi/CBAM.PyTorch






![[keil] uv编译分析](https://img-blog.csdnimg.cn/214e6d50be0b45a2accbafa27fb19ab6.png)