Open3D(C++) 整体最小二乘拟合平面

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/127188.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
对卷积的一点具象化理解
前言 卷积的公式一般被表示为下式: 对新手来说完全看不懂这是干什么,这个问题需要结合卷积的应用场景来说。
原理 卷积比较广泛的应用是在信号与系统中,所以有些公式的定义会按照信息流的习惯。假设存在一串信号g(x)经过一个响应h(x)时他的响…
Linux内核分析与应用
Linux 内核分析与应用[1] 蜻蜓点水,可作抛砖引玉 1.概述 用到的几个命令: insmod dmesg[2] lsmod[3] 章节测试: 部分可参考[4] <1>. Linux得以流行,是因为遵循了GPL协议,并不是因为遵循POSIX标准 (错) linux操作系统概述[5] linux概述[6] <2>…
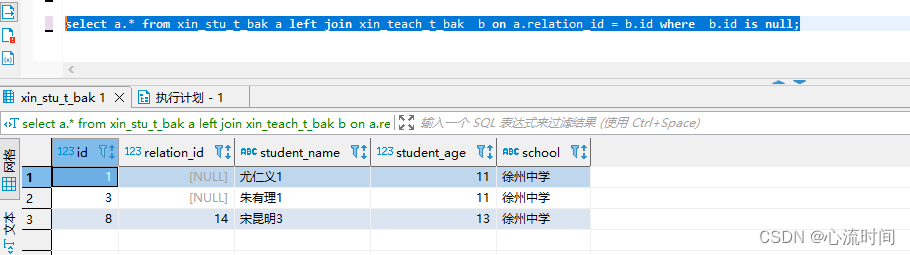
Mysql中in和exists的区别 not in、not exists、left join的相互转换
文章目录 1. in 介绍1.1 in中数据量的限制1.2 null值不参与in或not in,也就是说in and not in 并不是全量值,排除了null值1.3 in的执行逻辑 2. exists介绍2.1 exists not exists 是全量数据2.2 exists的执行逻辑 3. 小表驱动大表的好处4. in、not in、e…

开源对象存储系统minio部署配置与SpringBoot客户端整合访问
文章目录 1、MinIO安装部署1.1 下载 2、管理工具2.1、图形管理工具2.2、命令管理工具2.3、Java SDK管理工具 3、MinIO Server配置参数3.1、启动参数:3.2、环境变量3.3、Root验证参数 4、MinIO Client可用命令 官方介绍: MinIO 提供高性能、与S3 兼容的对…
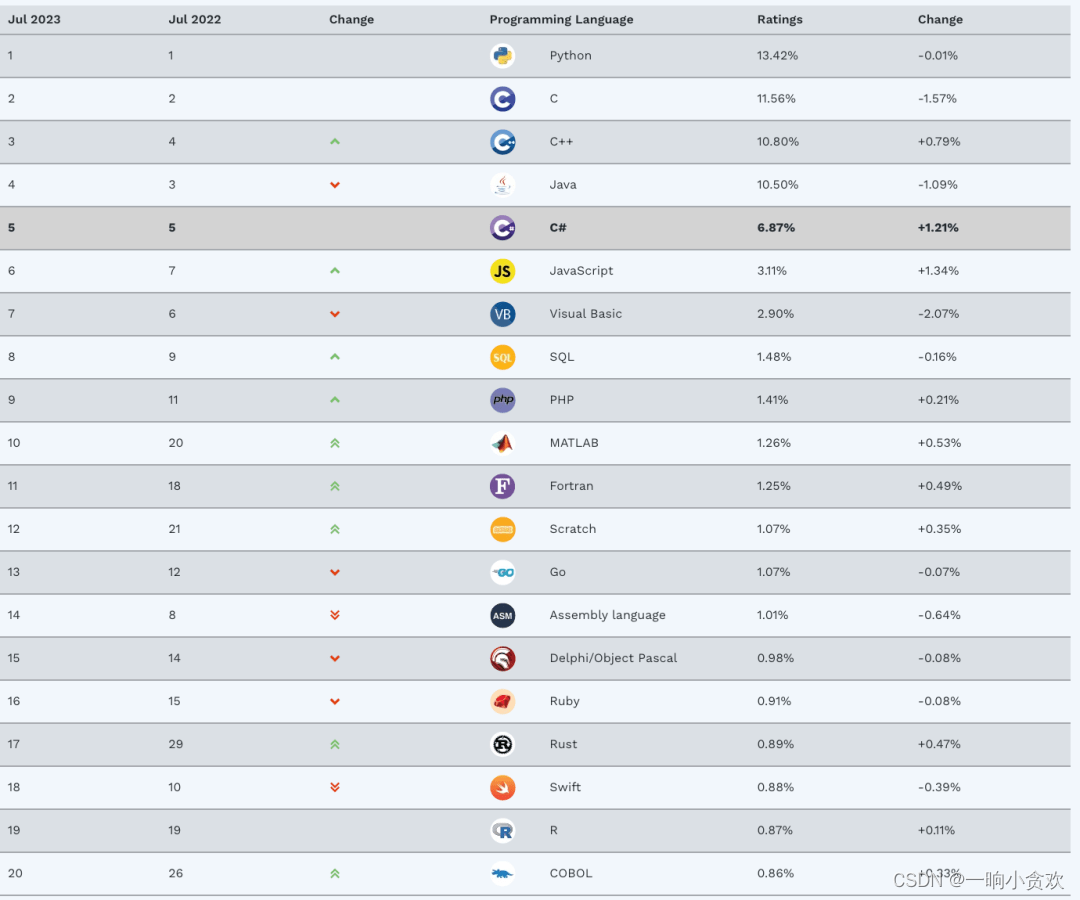
30天入门Python(基础篇)——第1天:为什么选择Python
文章目录 专栏导读作者有话说为什么学习Python原因1(总体得说)原因2(就业说) Python的由来(来自百度百科)Python的版本 专栏导读 🔥🔥本文已收录于《30天学习Python从入门到精通》 🉑🉑本专栏专门针对于零基础和需要重新复习巩固…

恒运资本:开盘时间是几点到几点?
开盘时刻是指各种商场的正式开端生意时刻,包括股票商场、外汇商场、商品期货商场等。关于出资者来说,了解开盘时刻是十分重要的,由于它直接关系到生意的时刻和机会。本文将从多个角度分析开盘时刻的重要性、不同商场的开盘时刻以及对出资者带…

tf和pytorch每轮epoch显示输出的auc是如何计算的
tf和pytorch每轮epoch显示输出的auc是如何计算的?
tf的计算
近似 ROC 或 PR 曲线的 AUC(曲线下面积)。
tf1 通过计算真阳性,假阳性,假阴性,真阴性值的计算策略。
tensorflow AUC & streaming_auc_我…

私有gitlab的搭建和配置教程
文章目录 1. 说明2. 安装操作2.1 依赖项2.2 gitlab-ce2.3 简要配置2.4 网页操作2.5 中文配置2.6 其他操作 3. 配置https3.1 配置证书3.2 url配置3.3 网页访问3.4 认证错误 4. ssh操作4.1 生成文件4.2 web配置4.3 额外操作 1. 说明
此教程基于Ubuntu22.04进行阐述,只…

【iOS】属性关键字
文章目录 前言一、深拷贝与浅拷贝1、OC的拷贝方式有哪些2. OC对象实现的copy和mutableCopy分别为浅拷贝还是深拷贝?3. 自定义对象实现的copy和mutableCopy分别为浅拷贝还是深拷贝?4. 判断当前的深拷贝的类型?(区别是单层深拷贝还是完全深拷贝…
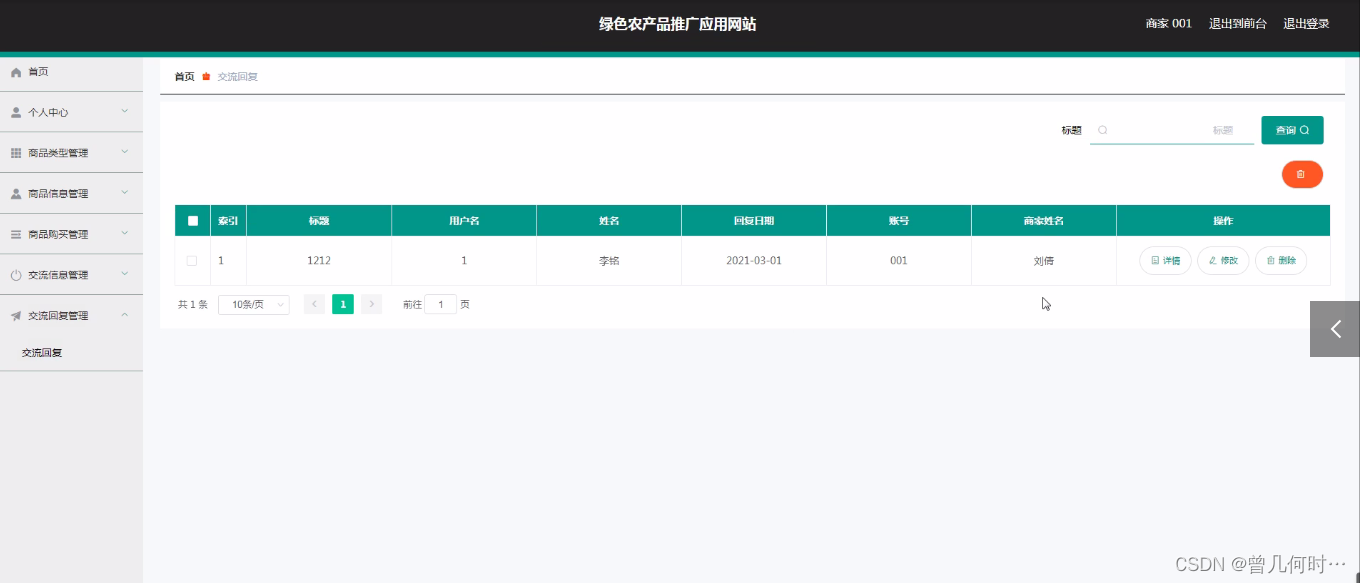
基于SSM的农产品推广应用网站
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用Vue技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…

Mac电脑其他文件占用超过一大半的内存如何清理?
mac的存储空间时不时会提示内存已满,查看内存占用比例最大的居然是「其他文件」,「其他文件」是Mac无法识别的格式文件或应用插件扩展等等...如果你想要给Mac做一次彻底的磁盘空间清理,首当其冲可先对「其他文件」下手,那么我们该…
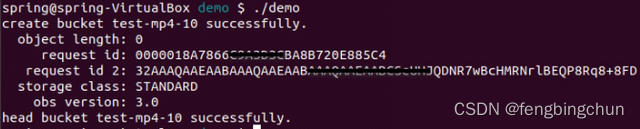
华为云中对象存储服务软件开发工具包(OBS SDK) C语言介绍
华为云的OBS介绍:摘自华为云官网:https://support.huaweicloud.com/obs/index.html 华为云的对象存储服务(Object Storage Service,OBS)是一个基于对象的海量存储服务,为客户提供海量、安全、高可靠、低成本的数据存储能力。 …
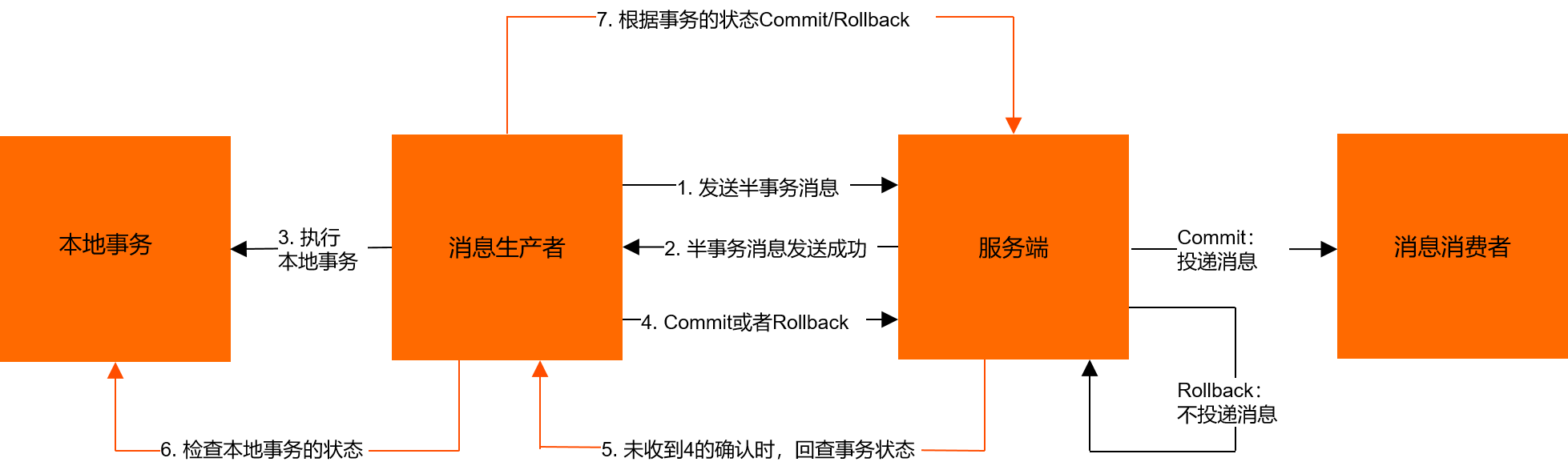
RocketMQ_高级特性_事务消息
Apache RocketMQ在4.3.0版中已经支持分布式事务消息,这里RocketMQ采用了2PC的思想来实现了提交事务消息,同时增加一个补偿逻辑来处理二阶段超时或者失败的消息,如下图所示。 事务消息发送步骤如下: 生产者将半事务消息发送至消息队…

基于jeecg-boot的flowable流程自定义业务退回撤回或驳回到发起人后的再次流程提交
更多nbcio-boot功能请看演示系统
gitee源代码地址
后端代码: https://gitee.com/nbacheng/nbcio-boot
前端代码:https://gitee.com/nbacheng/nbcio-vue.git
在线演示(包括H5) : http://122.227.135.243:9888 主要…
SpringMVC实现增删改查(CRUD)--从头到尾全面详细讲解
一,实现CRUD前准备工作
1.1 pom.xml依赖的配置
创建Model项目并导入相关pom.xml依赖
<properties><project.build.sourceEncoding>UTF-8</project.build.sourceEncoding><maven.compiler.source>1.8</maven.compiler.source><m…

Agisoft Metashape相机标定笔记
Lens Calibration(镜头标定)
使用Metashape进行自动相机标定是可能的。Metashape使用LCD显示屏作为标定目标(可选:使用打印的棋盘格图案,但需保证它是平坦的且单元格是正方形)。
相机标定步骤支持全相机标定矩阵的估计ÿ…
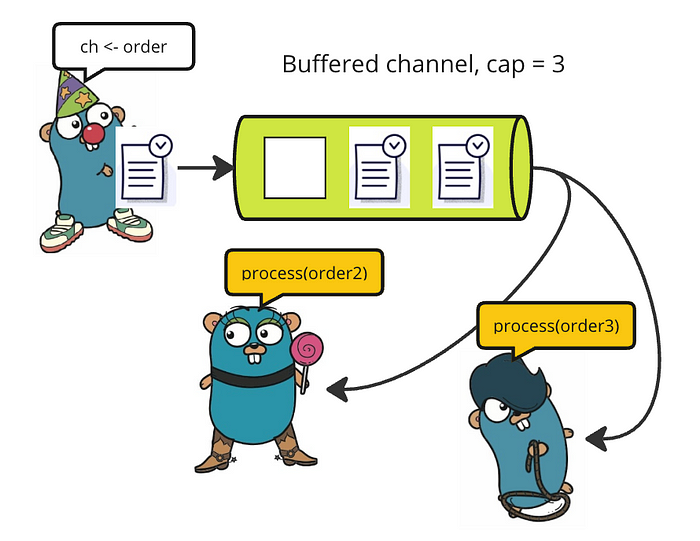
以可视化方式解释 Go 并发 - 通道
在并发编程中,许多编程语言采用共享内存/状态模型。然而,Go 通过实现 通信顺序进程 (CSP) 区别于众多语言。在 CSP 中,一个程序由并行的进程组成,这些进程不共享状态,而是使用通道进行通信和同步它们的操作。因此&…

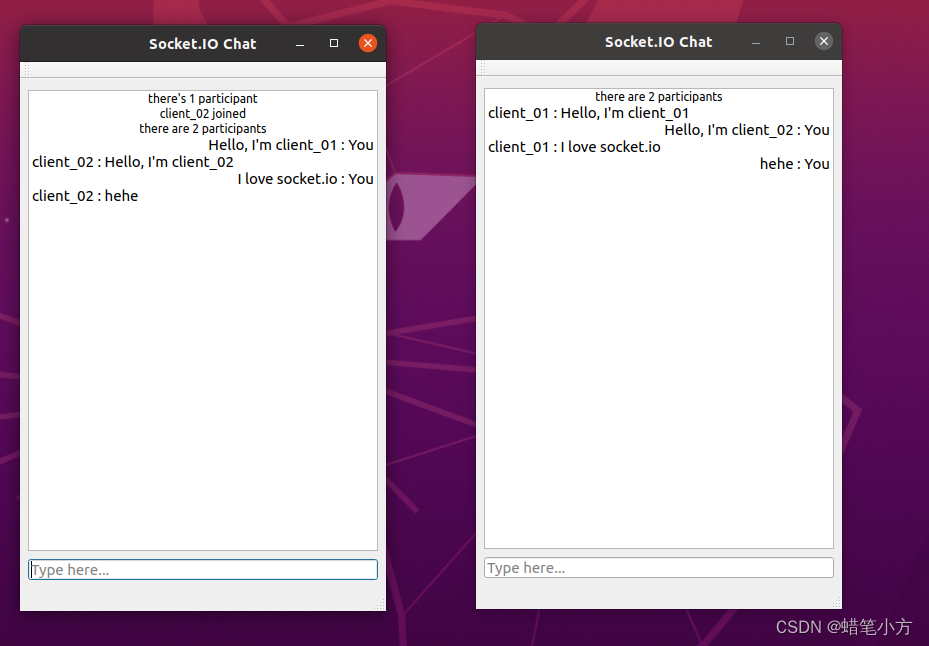
Ubuntu编译运行socket.io
本篇文章记录一下自己在ubuntu上编译运行socket.io的过程,客户端选用的是socket.io的c的库,编译起来倒不难,但是说到运行的话,对我来说确实是花了点功夫。毕竟程序要能运行起来才能更方便地去熟悉代码,因此今天我就记录…
推荐文章
- vue编译 Error: Could not load /src/core/config
- 初尝微信小程序(浪漫调酒师)
- 微软认证最新考题70-029 SQL7.0实现
- 模拟嵌入式边缘计算卡设计方案:367-XC7Z100 板卡 基于zynq XC7Z100 FMC接口通用计算平台
- 「Python大数据」词频数据渲染词云图导出HTML
- 乐视回应四天半工作制:体感非常好;OpenAI CEO 否认在训练 GPT-5;iOS 17 或增加更多灵动岛功能|极客头条...
- !力扣102. 二叉树的层序遍历
- # ⛳ Docker 安装、配置和详细使用教程-Win10专业版
- #03动态规划
- #LLM入门|Prompt#1.2_提示原则_Guidelines
- #力扣:2236. 判断根结点是否等于子结点之和@FDDLC
- #算法笔记01