【C++模拟实现】手撕AVL树
目录
- 【C++模拟实现】手撕AVL树
- AVL树的介绍(百度百科)
- AVL树insert函数的实现代码
- 验证是否为AVL树
- AVL树模拟实现的要点
- 易忘点
- AVL树的旋转思路
作者:爱写代码的刚子
时间:2023.9.10
前言:本篇博客将会介绍AVL树的模拟实现(模拟AVL树的插入),以及如何去验证是否为AVL树
AVL树的介绍(百度百科)
AVL树本质上还是一棵二叉搜索树,它的特点是:
-
本身首先是一棵二叉搜索树。
-
带有平衡条件:每个结点的左右子树的高度之差的绝对值(平衡因子)最多为1。
也就是说,AVL树,本质上是带了平衡功能的二叉查找树(二叉排序树,二叉搜索树)。
AVL树insert函数的实现代码
template<class K,class V>
class AVLTreeNode
{
public:AVLTreeNode(const pair<K,V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0){}AVLTreeNode* _left;AVLTreeNode* _right;AVLTreeNode* _parent;//需要设立父节点指针pair<K,V> _kv;int _bf;
};template<class K,class V>
class AVLTree
{typedef AVLTreeNode<K,V> Node;
public:AVLTree():_root(nullptr){}bool insert(const pair<K,V>& kv){if(_root==nullptr){_root=new Node(kv);return true;}else{Node* cur=_root;Node* parent=nullptr;//设计parent指针是必要的while(cur){if(cur->_kv.first>kv.first){parent=cur;cur=cur->_left;}else if(cur->_kv.first<kv.first){parent=cur;cur=cur->_right;}else{return false;}}cur=new Node(kv);//判断新加入的节点是父节点的左子树还是右子树if(parent->_kv.first>kv.first){parent->_left=cur;}else{parent->_right=cur;}cur->_parent=parent;while(parent){//及时调整父节点的平衡因子if(parent->_left==cur){--parent->_bf;}else{++parent->_bf;}if(parent->_bf==0)//当父节点的平衡因子为0时停止调整{break;}else if(parent->_bf==-1||parent->_bf==1){cur=parent;parent=parent->_parent;}else if(parent->_bf==2||parent->_bf==-2)//处理异常情况{//出现问题的情况if(parent->_bf==-2&&cur->_bf==-1){_RotateR(parent);//右单旋}else if(parent->_bf==2&&cur->_bf==1){_RotateL(parent);//左单旋}else if(parent->_bf==-2&&cur->_bf==1){ _RotateLR(parent);//左右双旋}else if(parent->_bf==2&&cur->_bf==-1){_RotateRL(parent);//右左双旋}else{assert(false);}break;}else{assert(false);}}}return true;} void _RotateR(Node* parent)//右单旋的实现{Node*cur=parent->_left;Node*curRight=cur->_right;Node*ppnode=parent->_parent;cur->_right=parent;parent->_left=curRight;if(curRight)//curRight可能是nullptr{curRight->_parent=parent;}parent->_parent=cur;//处理ppnodeif(parent==_root)//parent为头节点时需要单独处理{_root=cur;cur->_parent=nullptr;}else{if(ppnode->_left==parent){ppnode->_left=cur;}else{ppnode->_right=cur;}cur->_parent=ppnode;}parent->_bf=cur->_bf=0;}void _RotateL(Node* parent){Node* cur=parent->_right;Node* curLeft=cur->_left;Node* ppnode=parent->_parent;cur->_left=parent;parent->_right=curLeft;if(curLeft){curLeft->_parent=cur;}parent->_parent=cur;if(parent==_root){_root=cur;cur->_parent=nullptr;}else{if(ppnode->_left==parent){ppnode->_left=cur;}else{ppnode->_right=cur;}cur->_parent=ppnode;}parent->_bf=cur->_bf=0;}void _RotateLR(Node* parent){Node* cur=parent->_left;Node* curRight=cur->_right;int bf=curRight->_bf;_RotateL(cur);_RotateR(parent);//最好再处理一下平衡因子,减少耦合度if(bf==0)//单链情况下{parent->_bf=0;cur->_bf=0;curRight->_bf=0;}else if(bf==-1){parent->_bf=1;curRight->_bf=0;cur->_bf=0;}else if(bf==1){parent->_bf=-1;curRight->_bf=0;cur->_bf=0;}else{assert(false);}}void _RotateRL(Node* parent){Node* cur=parent->_right;Node* curLeft=cur->_left;int bf=curLeft->_bf;_RotateR(cur);_RotateL(parent);if(bf==0){parent->_bf=0;curLeft->_bf=0;cur->_bf=0;}else if(bf==1){parent->_bf=0;curLeft->_bf=-1;cur->_bf=0;}else if(bf==-1){parent->_bf=0;curLeft->_bf=1;cur->_bf=0;}else{assert(false);}}private:Node* _root;
};验证是否为AVL树
int _Height(Node* root){if(root==nullptr){return 0;}int leftHeight=_Height(root->_left);int rightHeight=_Height(root->_right);return leftHeight>rightHeight?leftHeight+1:rightHeight+1;}bool _Isbalance(){return _Isbalance(_root);}bool _Isbalance(Node* root){if(root==nullptr){return true;}int right=_Height(root->_right);int left=_Height(root->_left);if(root->_bf!=right-left){cout<<"平衡因子异常"<<root->_bf<<" "<<right<<" "<<left<<endl;return false;}return abs(right-left)<2&&_Isbalance(root->_left)&&_Isbalance(root->_right);}
-
根据AVL树的特性引入两个成员函数_Height函数用于计算二叉树的高度
-
以下为验证结果:

AVL树模拟实现的要点
易忘点
一定要时刻注意_parent指针的修改!尤其旋转函数中需要判断旋转后的二叉树的根节点是否还有父亲节点,如果有,需要在旋转前先保存,之后再链接上。
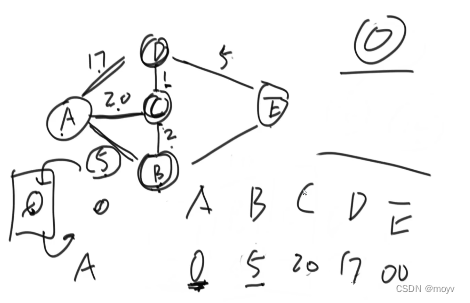
AVL树的旋转思路
- 新增在左,parent平衡因子减减
- 新增在右,parent平衡因子加加
- 更新后parent平衡因子 == 0,说明parent所在的子树的高度不变,不会再影响祖先,不用再继续沿着到eot的路径往上更新
- 更新后parent平衡因子 == 1 0r -1,说明parent所在的子树的高度变化,会再影响祖先,需要继续沿着到root的路径往上更新更新后
- 更新后parent平衡因子 == 2 or -2,说明parent所在的子树的高度变化且不平衡,对parent所在子树进行旋转,让他平衡
- 更到根节点,插入结束
由于AVL树画图较为麻烦,作者先不画了,可以看看其他大佬的博客,一些需要注意的地方已经写在代码注释里了,AVL树的删除之后有机会可以模拟实现一下。
AVL树的调试较为麻烦,模拟实现可以提高自己的调试能力。