北斗卫星导航系统(简称北斗系统)是我国自主发展、独立运行的全球卫星导航系统,为全球用户提供全天候、全天时、高精度的定位、导航和授时服务。2020年7月31日,北斗三号系统建成开通并提供全球服务,北斗系统进入全面推广应用的新阶段。
卫星导航定位解决了室外空旷区域定位的基本需求问题,在室外空旷区域北斗系统已经能够提供较为可靠的定位性能,尤其是北斗增强的区域差分技术(如实时动态码相位差分技术)、实时动态载波相位差分技术(Real-Time Kinematic,RTK)和广域增强技术(如精密单点定位技术),可实现有基于北斗信号的米级、亚米级甚至厘米级的高精度定位。然而,由于导航卫星信号的自身特点,其信号无法覆盖室内且对环境免疫性较差,难以满足室内定位以及室外遮挡等复杂区域定位的必要条件,目前已有的室内定位手段也因为系统复杂度和成本等问题,未能大范围推广应用。
5G系统具有密集组网、大带宽和多天线等对定位有利的条件,其信号应用于定位具有功率强、伪距测量精度高、信号带宽资源丰富、信号多径免疫性强等优势。因此,基于5G通信网络的定位技术可在室内等复杂条件下实现亚米级,甚至分米级定位精度。通过北斗与5G的深度融合,可构建室内外无缝定位体系,满足日益增长的泛在定位需求,从而为未来智能社会提供全场景高精度时空感知基础支撑。
一、5G网络定位研究现状
5G网络定位是在4G蜂窝网络定位基础上发展而来的。4G网络定位精度与参考基站的部署密度和无线环境参数等密切相关。目前,室外4G通用基站的部署间距约为300~1500 m,通用基站网络的定位精度在100m以上,只能作为北斗定位系统的补充。
第三代合作伙伴(3GPP) R15标准提出利用多输入多输出(Multi-Input Multi-output,MIMO)的多波束特性来进行定位增强。3GPP R16 标准增加了增强型小区标识(Enhanced Cell-ID ,E-CID)、多站往返时间(Multi-Round Trip Time,Multi-RTT)、下行离开角测量法(Downlink- Angle-of-Departure,DL-AOD)、下行信号到达时间差(Downlink- Time Difference of Arrival,DL-TDOA)、上行信号到达时间差(Uplink- Time Difference of Arrival,UL-TDOA)、上行到达角(Uplink-Angle-of-Arrival,UL-AOA)等定位方法。这些定位方法可实现米级定位精度,如下表所示。
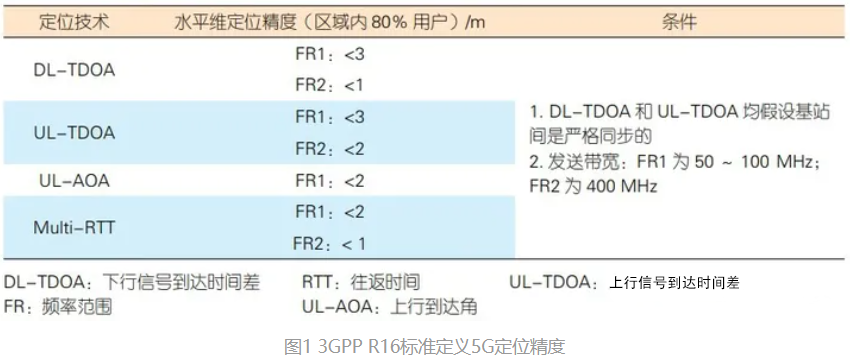
2021年3月,苏州移动联合华为在苏州地铁进行了5G 室内定位能力验证,5G 基站对用户终端的无线信号特征参数进行测量,并通过基站和边缘计算的协同,解算终端所处位置。经测试,在基站隐藏部署的情况下可实现地铁站台和站厅范围内99%区域3~5 m的定位精度。
虽然5G网络定位的标准已经制定,但5G网络的大面积应用和5G终端大规模普及还需要时日。目前基于5G网络的定位技术还处于探索阶段。
二、北斗系统定位研究现状
北斗系统是我国自主发展、独立运行的全球卫星导航系统,为全球用户提供全天候、全天时、高精度的定位、导航和授时服务。
北斗定位(要解决室外空旷区域的定位问题。结合北斗地基增强系统,北斗系统已经能够提供较高精度的定位性能。目前,中国移动(4400个)、千寻位置(2800个)、六分科技(2800个)已经在全国建立了北斗地基增强基站,中国移动更是建立了全球最大的地基增强系统。
基于地基增强的差分技术,如实时动态码相位差分技术( Real Time Differential,RTD) 、实时动态载波相位差分技术( Real-Time Kinematic,RTK) ,可实现基于北斗信号的米级、亚米级、厘米级的高精度定位。
三、5G+北斗融合高精度定位
卫星信号无法覆盖室内且对环境免疫性较差,难以满足室内定位以及室外遮挡等复杂区域定位的要求。同时考虑到当前5G定位技术尚未成熟,5G+北斗融合高精度定位更多的是,北斗解决室外“精准定位”问题,5G助力北斗解决信息传输“速度”问题。
通常情况下,5G+北斗融合高精度定位系统包括:地基增强参考站网、高精度定位平台、终端用户。
(1)建设覆盖全国的地基增强基准站网络,支持北斗系统多个频点信号,接收处理卫星定位数据并传输至高精度定位平台。
(2)高精度定位平台接收、分析及监控地基参考站的数据,获得误差信息,根据用户概略位置输出校正值(差分改正数),然后通过5G网络将其发送给用户终端。通过播发不同类型的差分改正数(RTD/RTK),可实现不同精度的定位效果。
(3)终端用户利用差分改正数纠正自身的定位结果,实现亚米级、厘米级高精度定位。
四、5G+北斗高精度定位应用场景
1、自动驾驶场景
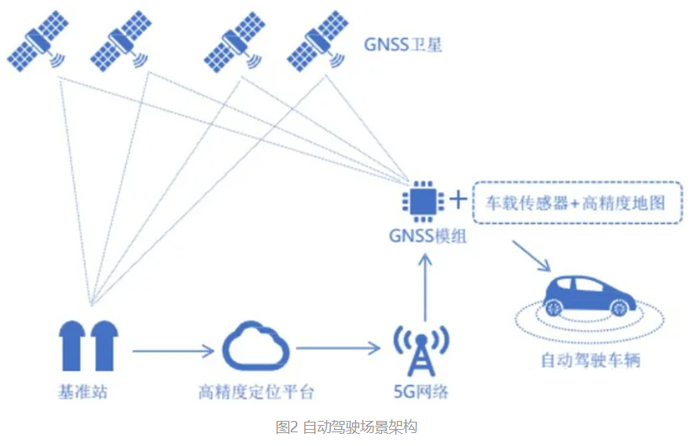
基于高精度定位平台,利用差分解算技术得到精准定位信息,结合5G网络为自动驾驶车辆提供实时厘米级高精度定位服务。同时,高精度定位与惯性导航、车载传感器、高精度地图进行融合,满足自动驾驶在全场景的定位精度和稳定性,保证行车安全。
2、智慧港口场景

基于高精度定位平台和5G网络,助力港口AGV集卡向IGV集卡演进,实现港口7*24小时高效运营,提升港口的生产效益。相比于地磁AGV方案,5G+北斗高精度定位的IGV无人集卡不仅成本低、灵活性高,还具有远程控制功能,能够在无人集卡出现问题时远程接管进行操作。
3、精准农业场景

基于全国统一时空基准的动态厘米级高精度定位能力,整合机械控制系统、RTK硬件终端、视觉传感器、5G通讯模组等多项关键技术,实现农业机械装备远程控制、标准化自主精准作业,大幅提升作业效率,降低作业门槛。
4、测量测绘场景

为测量工程客户提供稳定、一致的高精度定位应用解决方案。在服务范围内,无需自建基站,提供统一坐标,随意漫游,支持各类RTK终端,为用户提供高可用的网络RTK厘米级高精度定位服务,大幅提升测量作业工作效率及质量。
5、桥梁检测场景

基于5G+北斗高精度定位平台,结合北斗定位系统和传感技术,实现桥梁结构健康的长期精准监测。利用5G的高可靠性、海量通信能力,提高监测网络的长期稳定性和系统运行效率;利用5G低时延特性,有效提高北斗定位数据可用性;利用5G边缘计算能力实现高精度定位数据快速、安全、高效本地解算。该方案可赋能桥梁健康监测和智慧管养,实现桥梁安全高效预警,降低桥梁管养费用,延长桥梁的结构寿命。
6、边坡监测场景
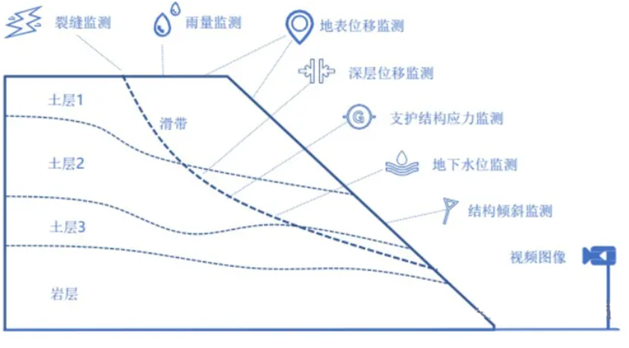
基于5G+北斗高精度定位以及传感器网络监测,通过对边坡体活动信息的全面数据采集,实现边坡安全状况的实时监测和预测预警。5G网络提供高可靠、广连接切片化的网络服务,北斗高精度定位能力实现边坡体高精度、绝对量的表面变形监测。该方案提高边坡监测系统运行效率,为隐患边坡的治理提供数据参考,辅助防灾减灾科学决策。
7、两客一危重点车辆定位
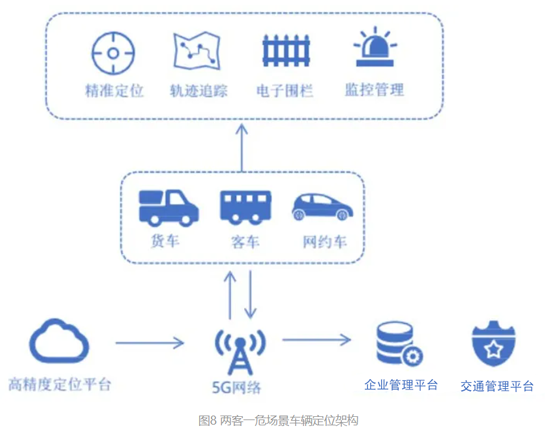
基于高精度定位平台和车载定位监控终端,可以实现车辆的精准定位、轨迹回溯、电子围栏、监控管理等功能,提供管理企业和交通部门车辆的实时状态和行车记录,通过数据化分析,加强车辆道路管理,降低道路事故率。