深度学习论文: ISTDU-Net:Infrared Small-Target Detection U-Net及其PyTorch实现
ISTDU-Net:Infrared Small-Target Detection U-Net
PDF: https://doi.org/10.1109/LGRS.2022.3141584
PyTorch代码: https://github.com/shanglianlm0525/CvPytorch
PyTorch代码: https://github.com/shanglianlm0525/PyTorch-Networks
1 ISTDU-Net Structure
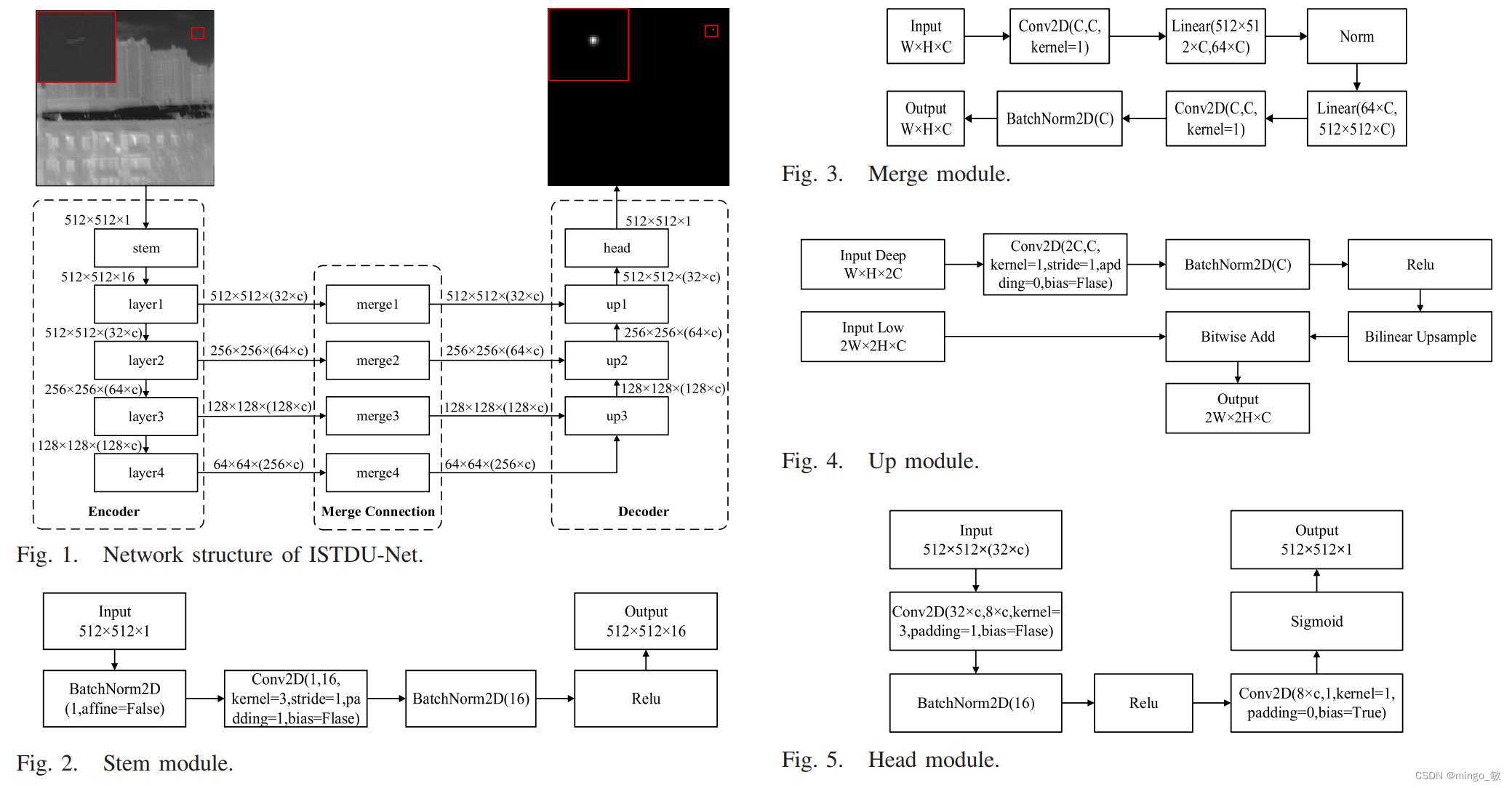
ISTDU-Net网络的整体结构如图1所示。它由三个主要部分组成:编码器(Encoder)、解码器(Decoder)和跳连接Merge Connection。
编码器部分负责对输入图像进行下采样,降低分辨率,并在通道层面拓宽特征深度。这样做的目的是提取输入图像的特征,并通过为特征图组分配权重来增强小目标的表征能力。
解码器部分负责执行高分辨率特征图和低分辨率特征图的多尺度特征融合。通过将不同分辨率的特征图进行融合,可以获得更丰富的特征信息,从而提高目标检测的准确性。
编码器和解码器之间通过跳连接连接。跳连接中引入了全连接层,它基于全局感受野对输入特征图进行特征感知和调整。这样可以增强小目标和背景之间的差异,从而提高目标检测的性能。
ISTDU-Net网络结构示意图
2 Loss Function
红外小目标检测实际上是将输入图像的每个像素进行二元分类的问题。为了衡量模型的性能,使用均方误差(MSE)作为损失函数。

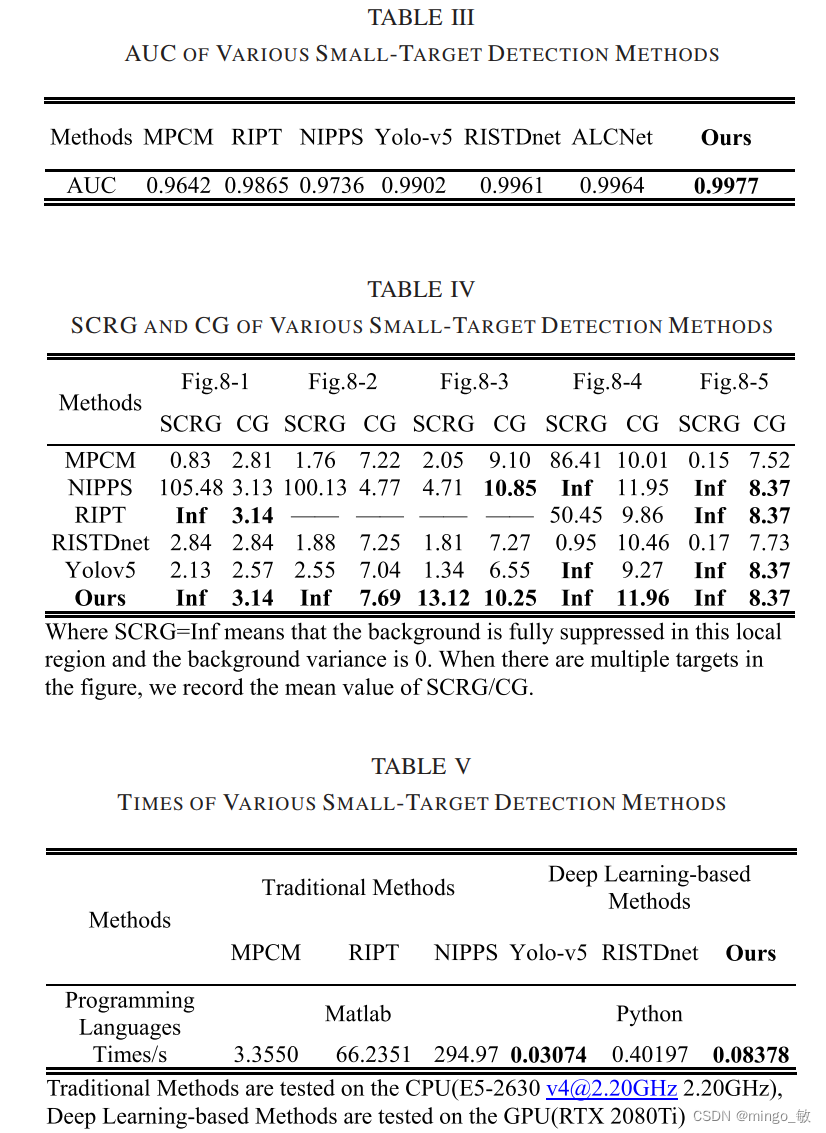
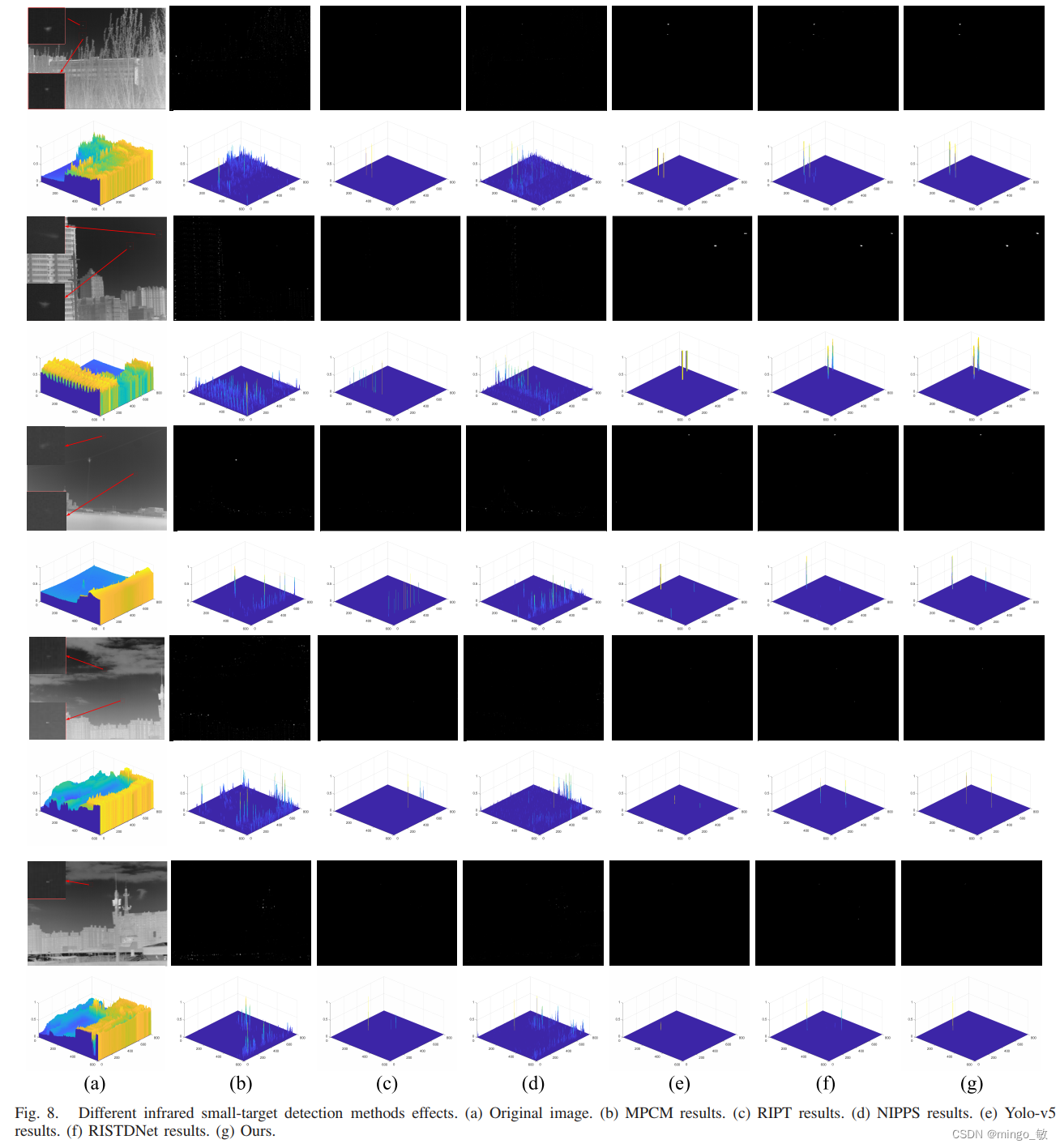
3 Experiment