再回顾下镜面部分的分割求和近似法

现在关注第二部分

最后可化为

也就是说,这两部分积分可以获得F0的系数和F0的偏差。
这两个值可以存储到BRDF积分贴图的RG部分。
void main()
{
vec2 integratedBRDF = IntegrateBRDF(TexCoords.x, TexCoords.y);
FragColor = integratedBRDF;
}
再看函数vec2 IntegrateBRDF(float NdotV, float roughness) ,可知积分贴图的横坐标是NotV,纵坐标是粗糙度。
查看这个RG是如何计算的。
循环采样后A /= float(SAMPLE_COUNT); B /= float(SAMPLE_COUNT); return vec2(A, B); 即A,B分别是F0和系数和F0的偏差,也就是积分贴图的RG部分。结合公式
在对每个采样向量中,
float Fc = pow(1.0 - VdotH, 5.0);
A += (1.0 - Fc) * G_Vis;
B += Fc * G_Vis;
继续向下float G = GeometrySmith(N, V, L, roughness); float G_Vis = (G * VdotH) / (NdotH * NdotV); 可知,使用BRDF的几何函数处理了采样向量。继续向下vec2 Xi = Hammersley(i, SAMPLE_COUNT);
vec3 H = ImportanceSampleGGX(Xi, N, roughness);
vec3 L = normalize(2.0 * dot(V, H) * H - V);
类似于预过滤环境贴图,也是通过低差异序列进行重要性采样获取采样向量。
在c++部分。
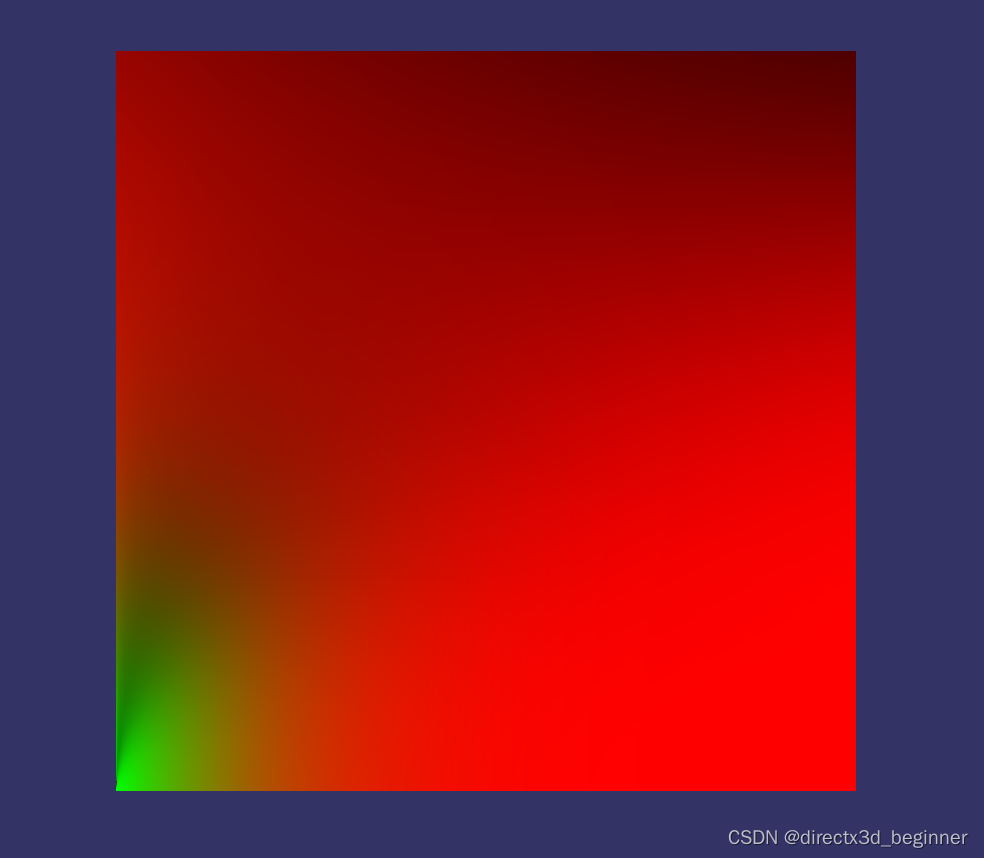
设置brdf积分贴图为512x512,纹理设置为GL_RG
texture->setSourceFormat(GL_RG);
运行结果如下:
代码如下:
#include <osg/TextureCubeMap>
#include <osg/TexGen>
#include <osg/TexEnvCombine>
#include <osgUtil/ReflectionMapGenerator>
#include <osgDB/ReadFile>
#include <osgViewer/Viewer>
#include <osg/NodeVisitor>
#include <osg/ShapeDrawable>
#include <osg/Texture2D>
#include <osgDB/WriteFile>
static const char * vertexShader =
{
“in vec3 aPos;\n”
“in vec2 texcoord;”
“varying vec2 TexCoords;\n”
“void main(void)\n”
“{\n”
“TexCoords = texcoord;\n”
“gl_Position = ftransform();\n”
//“gl_Position = view * view * vec4(aPos,1.0);”
“}\n”
};
static const char psShader =
{
“#version 330 core \n”
“out vec2 FragColor; \n”
“in vec2 TexCoords; \n”
" \n"
“const float PI = 3.14159265359; \n”
“// ---------------------------------------------------------------------------- \n”
“// http://holger.dammertz.org/stuff/notes_HammersleyOnHemisphere.html \n”
“// efficient VanDerCorpus calculation. \n”
“float RadicalInverse_VdC(uint bits) \n”
“{ \n”
" bits = (bits << 16u) | (bits >> 16u); \n"
" bits = ((bits & 0x55555555u) << 1u) | ((bits & 0xAAAAAAAAu) >> 1u); \n"
" bits = ((bits & 0x33333333u) << 2u) | ((bits & 0xCCCCCCCCu) >> 2u); \n"
" bits = ((bits & 0x0F0F0F0Fu) << 4u) | ((bits & 0xF0F0F0F0u) >> 4u); \n"
" bits = ((bits & 0x00FF00FFu) << 8u) | ((bits & 0xFF00FF00u) >> 8u); \n"
" return float(bits) * 2.3283064365386963e-10; // / 0x100000000 \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“vec2 Hammersley(uint i, uint N) \n”
“{ \n”
" return vec2(float(i) / float(N), RadicalInverse_VdC(i)); \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“vec3 ImportanceSampleGGX(vec2 Xi, vec3 N, float roughness) \n”
“{ \n”
" float a = roughnessroughness; \n"
" \n"
" float phi = 2.0 * PI * Xi.x; \n"
" float cosTheta = sqrt((1.0 - Xi.y) / (1.0 + (aa - 1.0) * Xi.y)); \n"
" float sinTheta = sqrt(1.0 - cosThetacosTheta); \n"
" \n"
" // from spherical coordinates to cartesian coordinates - halfway vector \n"
" vec3 H; \n"
" H.x = cos(phi) * sinTheta; \n"
" H.y = sin(phi) * sinTheta; \n"
" H.z = cosTheta; \n"
" \n"
" // from tangent-space H vector to world-space sample vector \n"
" vec3 up = abs(N.z) < 0.999 ? vec3(0.0, 0.0, 1.0) : vec3(1.0, 0.0, 0.0); \n"
" vec3 tangent = normalize(cross(up, N)); \n"
" vec3 bitangent = cross(N, tangent); \n"
" \n"
" vec3 sampleVec = tangent * H.x + bitangent * H.y + N * H.z; \n"
" return normalize(sampleVec); \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“float GeometrySchlickGGX(float NdotV, float roughness) \n”
“{ \n”
" // note that we use a different k for IBL \n"
" float a = roughness; \n"
" float k = (a * a) / 2.0; \n"
" \n"
" float nom = NdotV; \n"
" float denom = NdotV * (1.0 - k) + k; \n"
" \n"
" return nom / denom; \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“float GeometrySmith(vec3 N, vec3 V, vec3 L, float roughness) \n”
“{ \n”
" float NdotV = max(dot(N, V), 0.0); \n"
" float NdotL = max(dot(N, L), 0.0); \n"
" float ggx2 = GeometrySchlickGGX(NdotV, roughness); \n"
" float ggx1 = GeometrySchlickGGX(NdotL, roughness); \n"
" \n"
" return ggx1 * ggx2; \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“vec2 IntegrateBRDF(float NdotV, float roughness) \n”
“{ \n”
" vec3 V; \n"
" V.x = sqrt(1.0 - NdotV*NdotV); \n"
" V.y = 0.0; \n"
" V.z = NdotV; \n"
" \n"
" float A = 0.0; \n"
" float B = 0.0; \n"
" \n"
" vec3 N = vec3(0.0, 0.0, 1.0); \n"
" \n"
" const uint SAMPLE_COUNT = 1024u; \n"
" for (uint i = 0u; i < SAMPLE_COUNT; ++i) \n"
" { \n"
" // generates a sample vector that’s biased towards the \n"
" // preferred alignment direction (importance sampling). \n"
" vec2 Xi = Hammersley(i, SAMPLE_COUNT); \n"
" vec3 H = ImportanceSampleGGX(Xi, N, roughness); \n"
" vec3 L = normalize(2.0 * dot(V, H) * H - V); \n"
" \n"
" float NdotL = max(L.z, 0.0); \n"
" float NdotH = max(H.z, 0.0); \n"
" float VdotH = max(dot(V, H), 0.0); \n"
" \n"
" if (NdotL > 0.0) \n"
" { \n"
" float G = GeometrySmith(N, V, L, roughness); \n"
" float G_Vis = (G * VdotH) / (NdotH * NdotV); \n"
" float Fc = pow(1.0 - VdotH, 5.0); \n"
" \n"
" A += (1.0 - Fc) * G_Vis; \n"
" B += Fc * G_Vis; \n"
" } \n"
" } \n"
" A /= float(SAMPLE_COUNT); \n"
" B /= float(SAMPLE_COUNT); \n"
" return vec2(A, B); \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“void main() \n”
“{ \n”
" vec2 integratedBRDF = IntegrateBRDF(TexCoords.x, TexCoords.y); \n"
" FragColor = integratedBRDF; \n"
“} \n”
};
int main()
{
int imageWidth = 512;
int imageHeight = 512;
osg::ref_ptrosg::Vec3Array vertices = new osg::Vec3Array;
vertices->push_back(osg::Vec3(-imageWidth, 0.0f, -imageHeight));
vertices->push_back(osg::Vec3(imageWidth, 0.0f, -imageHeight));
vertices->push_back(osg::Vec3(imageWidth, 0.0f, imageHeight));
vertices->push_back(osg::Vec3(-imageWidth, 0.0f, imageHeight));
osg::ref_ptr<osg::Vec3Array> normals = new osg::Vec3Array;
normals->push_back(osg::Vec3(0.0f, -1.0f, 0.0f));
osg::ref_ptr<osg::Vec2Array> texcoords = new osg::Vec2Array;
texcoords->push_back(osg::Vec2(0.0f, 0.0f));
texcoords->push_back(osg::Vec2(1.0f, 0.0f));
texcoords->push_back(osg::Vec2(1.0f, 1.0f));
texcoords->push_back(osg::Vec2(0.0f, 1.0f));
osg::ref_ptr<osg::Geometry> quad = new osg::Geometry;
quad->setVertexArray(vertices.get());quad->setNormalArray(normals.get());
quad->setNormalBinding(osg::Geometry::BIND_OVERALL);
quad->setTexCoordArray(0, texcoords.get());
quad->addPrimitiveSet(new osg::DrawArrays(GL_QUADS, 0, 4));quad->setVertexAttribArray(1, vertices, osg::Array::BIND_PER_VERTEX);
quad->setVertexAttribArray(2, texcoords, osg::Array::BIND_PER_VERTEX);
osg::ref_ptr<osg::Texture2D> texture = new osg::Texture2D;
texture->setSourceFormat(GL_RG);
texture->setFilter(osg::Texture2D::MIN_FILTER, osg::Texture2D::LINEAR);
texture->setFilter(osg::Texture2D::MAG_FILTER, osg::Texture2D::LINEAR);
texture->setWrap(osg::Texture::WRAP_S, osg::Texture::CLAMP_TO_EDGE);
texture->setWrap(osg::Texture::WRAP_T, osg::Texture::CLAMP_TO_EDGE);
osg::ref_ptr<osg::Geode> geode = new osg::Geode;
geode->addDrawable(quad.get());
osg::ref_ptr<osg::StateSet> stateset = geode->getOrCreateStateSet();
stateset->setTextureAttributeAndModes(0, texture.get());//shaderosg::ref_ptr<osg::Shader> vs1 = new osg::Shader(osg::Shader::VERTEX, vertexShader);
osg::ref_ptr<osg::Shader> ps1 = new osg::Shader(osg::Shader::FRAGMENT, psShader);
osg::ref_ptr<osg::Program> program1 = new osg::Program;
program1->addShader(vs1);
program1->addShader(ps1);
program1->addBindAttribLocation("aPos", 1);
program1->addBindAttribLocation("texcoord", 2);osg::ref_ptr<osg::Uniform> tex0Uniform = new osg::Uniform("tex0", 0);
stateset->addUniform(tex0Uniform);
stateset->setAttribute(program1, osg::StateAttribute::ON);//osgDB::writeImageFile(*image, strBRDFLUTImageName);
osgViewer::Viewer viewer;
viewer.setSceneData(geode.get());bool bPrinted = false;
return viewer.run();
}