一、说明
在这篇文章中,我们将重点关注 ROS 2的通信栈DDS,其中这是介于管理节点通信与控制节点通信环节,是上位机决策体系与下位机的控制体系实现指令-执行-反馈的关键实现机制。
二、ROS工程的概念框架
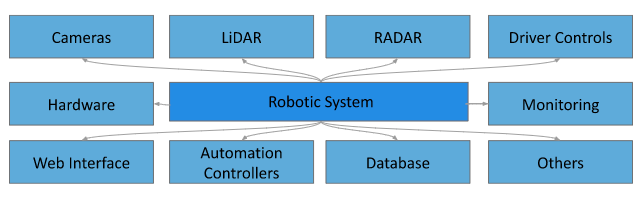
现代机器人系统非常复杂,因为需要集成各种类型的传感器、执行器和其他硬件组件,以便在各种环境中执行任务。这些系统还需要复杂的软件来处理来自传感器的数据、控制执行器并根据该数据做出决策。为了实现高水平的性能和功能,现代机器人系统的复杂性是必要的。
在这篇文章中,我们将重点关注 ROS 2的通信栈DDS,其中这是介于管理节点通信与控制节点通信环节,是上位机决策体系与下位机的控制体系实现指令-执行-反馈的关键实现机制。
现代机器人系统非常复杂,因为需要集成各种类型的传感器、执行器和其他硬件组件,以便在各种环境中执行任务。这些系统还需要复杂的软件来处理来自传感器的数据、控制执行器并根据该数据做出决策。为了实现高水平的性能和功能,现代机器人系统的复杂性是必要的。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/144631.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!