本章讲解强化学习的基本概念。第 3.1 节介绍马尔可夫决策过程(Markov decision
process,简称 MDP),它是最常见的对强化学习建模的方法。第 3.2 节定义策略函数,包括随机策略和确定策略。第 3.3 节分析强化学习中的随机性的两个来源。第 3.4 节定义回报和折扣回报。第 3.5 节定义动作价值函数和状态价值函数。第 3.6 节介绍强化学习常用的实验环境。
3.1马尔科夫决策过程
强化学习的主体被称为智能体 (agent)。
环境(environment) 是与智能体交互的对象
强化学习的数学基础和建模工具是马尔可夫决策过程(Markov decision process, MDP)。一个 MDP 通常由状态空间、动作空间、状态转移函数、奖励函数、折扣因子等组成。
在每个时刻,环境有一个状态 (state),可以理解为对当前时刻环境的概括。
-
状态空间(state space) 是指所有可能存在状态的集合,记作花体字母𝓢。
-
动作(action) 是智能体基于当前状态所做出的决策。
-
动作空间(action space) 是指所有可能动作的集合,记作花体字母 𝓐。
-
奖励(reward) 是指在智能体执行一个动作之后,环境返回给智能体的一个数值。
-

-
状态转移(state transition) 是指智能体从当前 t 时刻的状态 s 转移到下一个时刻状态为 s′ 的过程。
-

3.2策略
策略(policy) 的意思是根据观测到的状态,如何做出决策,即如何从动作空间中选
取一个动作。
强化学习的目标就是得到一个策略函数,在每个时刻根据观测到的状态做出决策。
随机策略

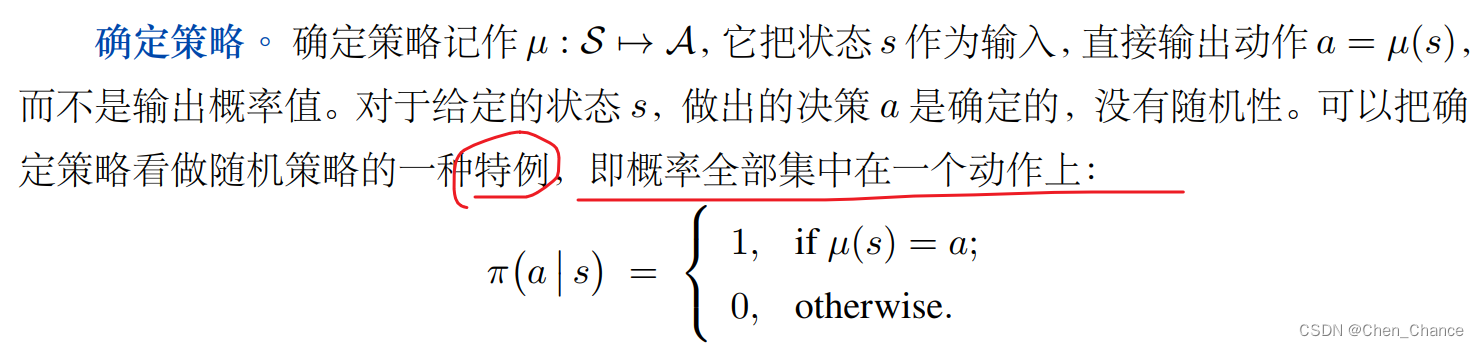
确定策略
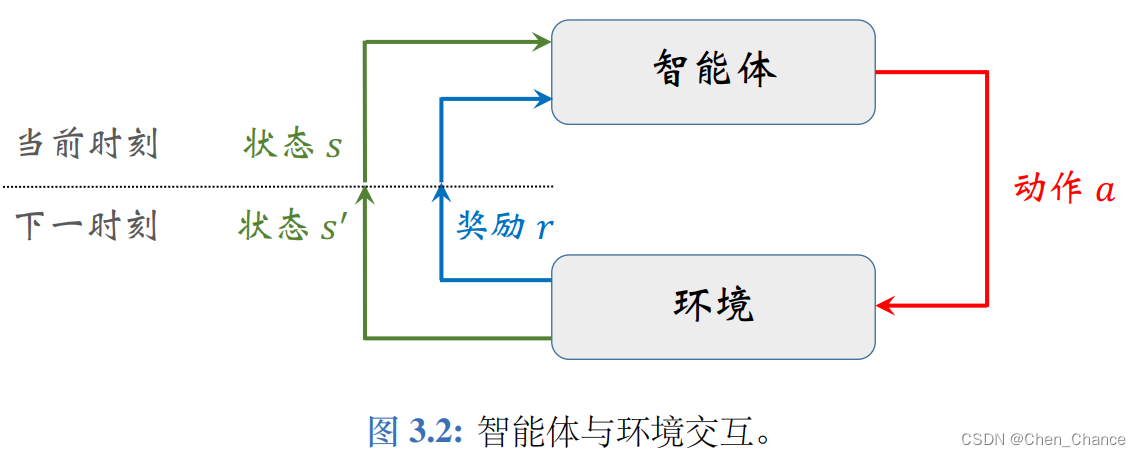
智能体与环境交互(agent environment interaction)
是指智能体观测到环境的状态s,做出动作 a,动作会改变环境的状态,环境反馈给智能体奖励 r 以及新的状态 s′。
回合(episodes)
“回合”的概念来自游戏,指智能体从游戏开始到通关或者结束的过程。强化学习对样本数量的要求很高,即便是个简单的游戏,也需要玩上万回合游戏才能学到好的策略。
Epoch 是一个类似而又有所区别的概念,常用于监督学习。一个 epoch 意思是用所有训练数据进行前向计算和反向传播,而且每条数据恰好只用一次。
3.3随机性的来源
这一节的内容是强化学习中的随机性。随机性有两个来源:策略函数与状态转移函数。搞明白随机性的两个来源,对之后的学习很有帮助。本书中用 S t S_t St 和 s t s_t st 分别表示 t 时刻的状态及其观测值,用 A t A_t At 和 a t a_t at 分别表示 t 时刻的动作及其观测值。
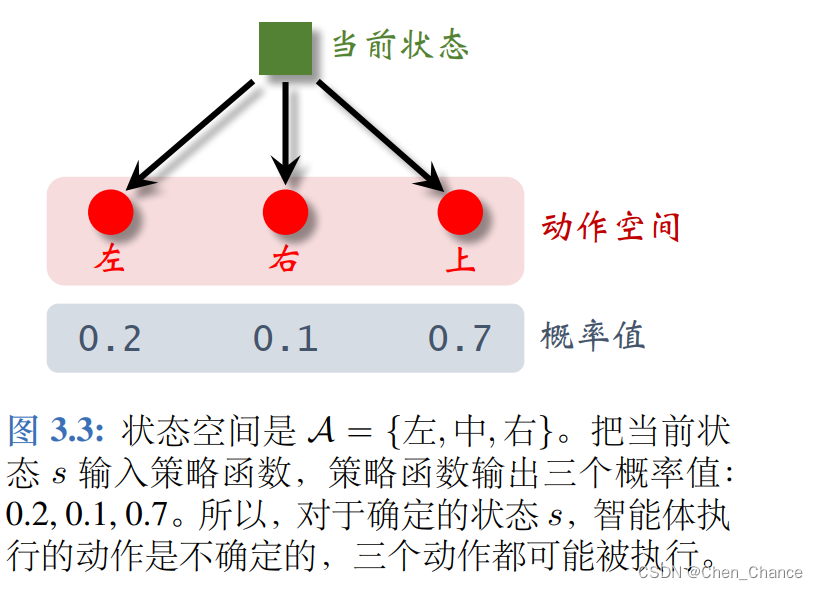
动作的随机性来自于随机决策。给定当前状态 s,策略函数 π ( a ∣ s ) \pi(a|s) π(a∣s) 会算出动作空间 A 中每个动作 a 的概率值。智能体执行的动作是随机抽样的结果,所以带有随机性。
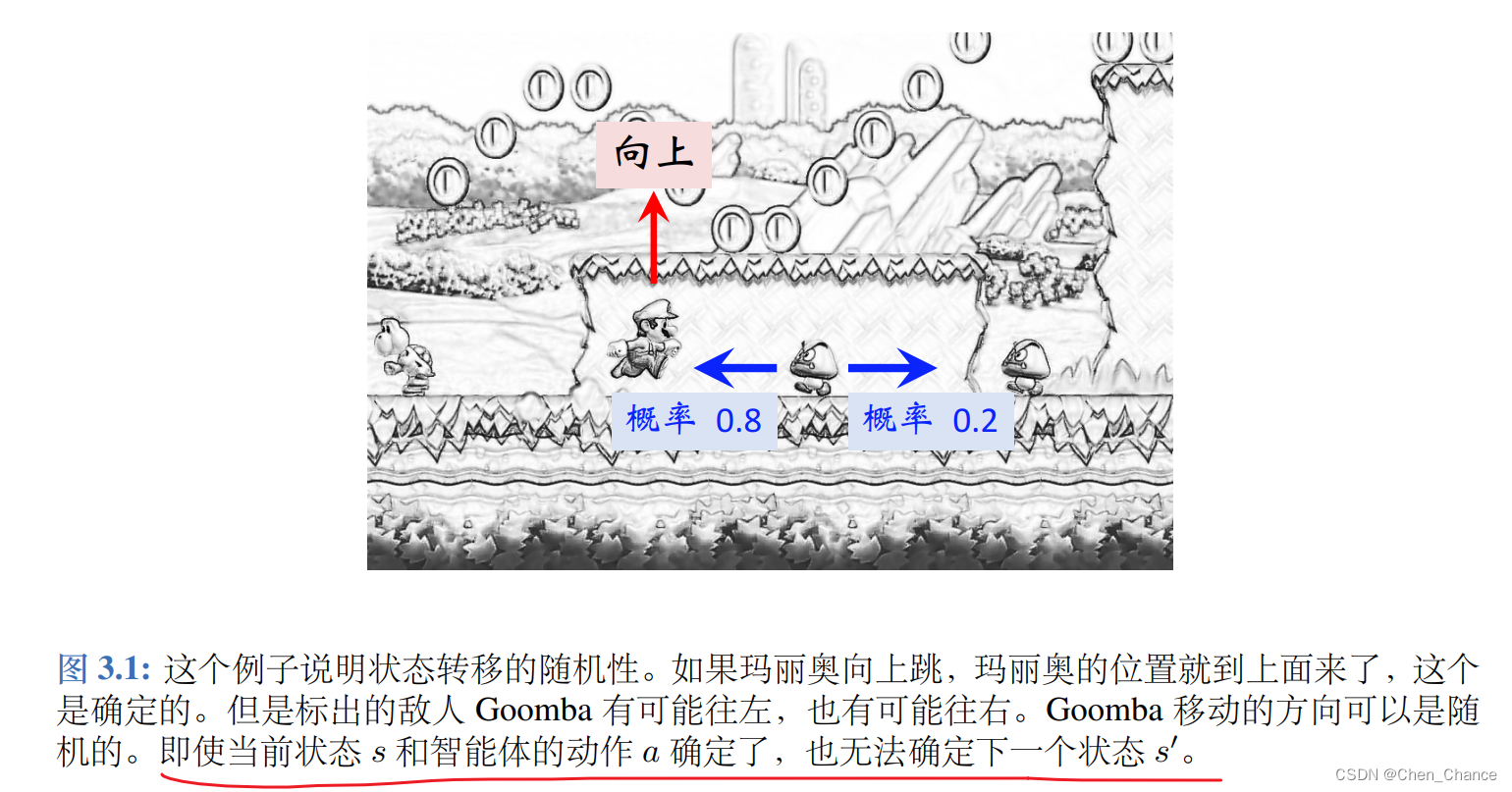
状态的随机性来自于状态转移函数。当状态 s 和动作 a 都被确定下来,下一个状态仍然有随机性。环境(比如游戏程序)用状态转移函数 p(s′|s, a) 计算所有可能的状态的概率,然后做随机抽样,得到新的状态。

奖励是状态和动作的函数。
r t = r ( s t , a t ) . r_t = r(s_t, a_t). rt=r(st,at).
如果 At 还没被观测到,或者 (St, At) 都没被观测到,那么 t 时刻的奖励就有不确定性。我们用
R t = r ( s t , A t ) R_t = r(s_t, A_t) Rt=r(st,At)或 R t = r ( S t , A t ) R_t = r(S_t, A_t) Rt=r(St,At)
马尔可夫性质(Markov property)︒ 上文在讲解状态转移的时候,假设状态转移具有马尔可夫性质,

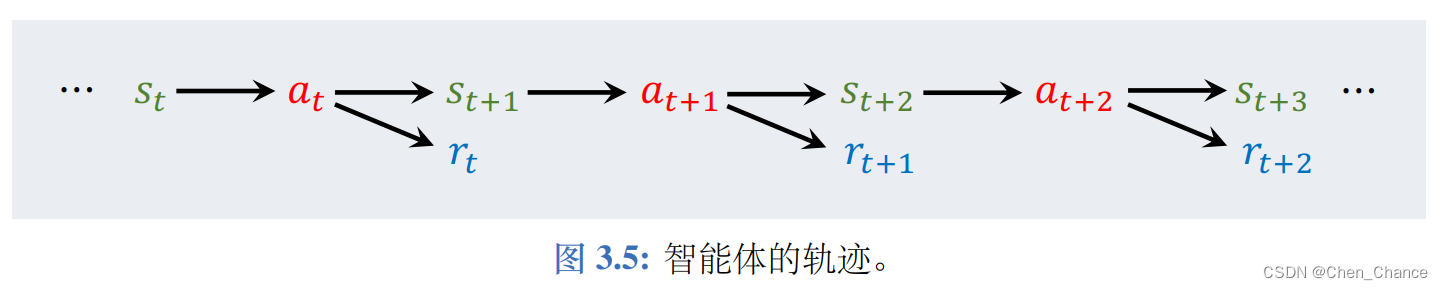
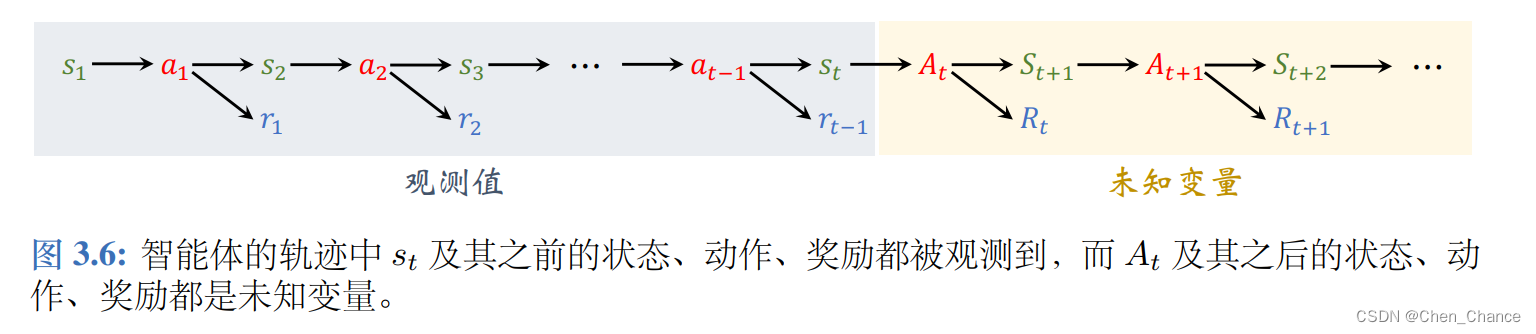
轨迹(trajectory) 是指一回合(episode)游戏中,智能体观测到的所有的状态、动作、奖励:
3.4回报与折扣回报
本节介绍回报(return)和折扣回报(discounted return)这两个概念,并且讨论其随机性来源。由于回报是折扣率等于 1 的特殊折扣回报,后面的章节中用“回报”指代“折扣回报”,不再区分两者。本节我们用 Rt 和 rt 表示 t 时刻奖励随机变量及其观测值
3.4.1回报
回报(return) 是从当前时刻开始到本回合结束的所有奖励的总和,所以回报也叫做累计奖励(cumulative future reward) 。

强化学习的目标是最大化回报,而不是最大化当前的奖励。
3.4.2 折扣回报

3.4.3 回报中的随机性
3.4.4 有限期 MDP 和无限期 MDP

本书后面章节统一用 n 表示回合的长度。方便起见,我们就不再严格区分有限期和无限期的情况,即不区分 n 是有界、还是 n→∞。
3.5价值函数
这一节介绍动作价值函数 Q π ( s , a ) Q_{\pi}(s, a) Qπ(s,a),最优动作价值函数 Q ⋆ ( s , a ) Q_⋆(s, a) Q⋆(s,a),状态价值函数 V π ( s ) V_{\pi}(s) Vπ(s)。它们都是回报的期望。
3.5.1 动作价值函数
在 t 时刻,我们不知道 U t U_t Ut 的值,而我们又想预判 Ut 的值从而知道局势的好坏。该怎么办呢?解决方案就是对 Ut 求期望,消除掉其中的随机性。

上文这里我纠结了很久为什么也依赖于状态s_t而只说a_t的作用,后来转念一想,只是说依赖于没有说只依赖于,所以就不纠结了(也有可能我理解有误)
(补充:更准确地说,应该叫“动作状态价值函数”,但是大家习惯性地称之为“动作价值函数”。这可能和我上面的纠结遥相呼应)
3.5.2 最优动作价值函数
3.5.3 状态价值函数
假设 AI 用策略函数 π 下围棋。 AI 想知道当前状态 s t s_t st(即棋盘上的格局)是否对自己有利,以及自己和对手的胜算各有多大。该用什么来量化双方的胜算呢?答案是状态价值函数(state-value function)
3.6实验环境
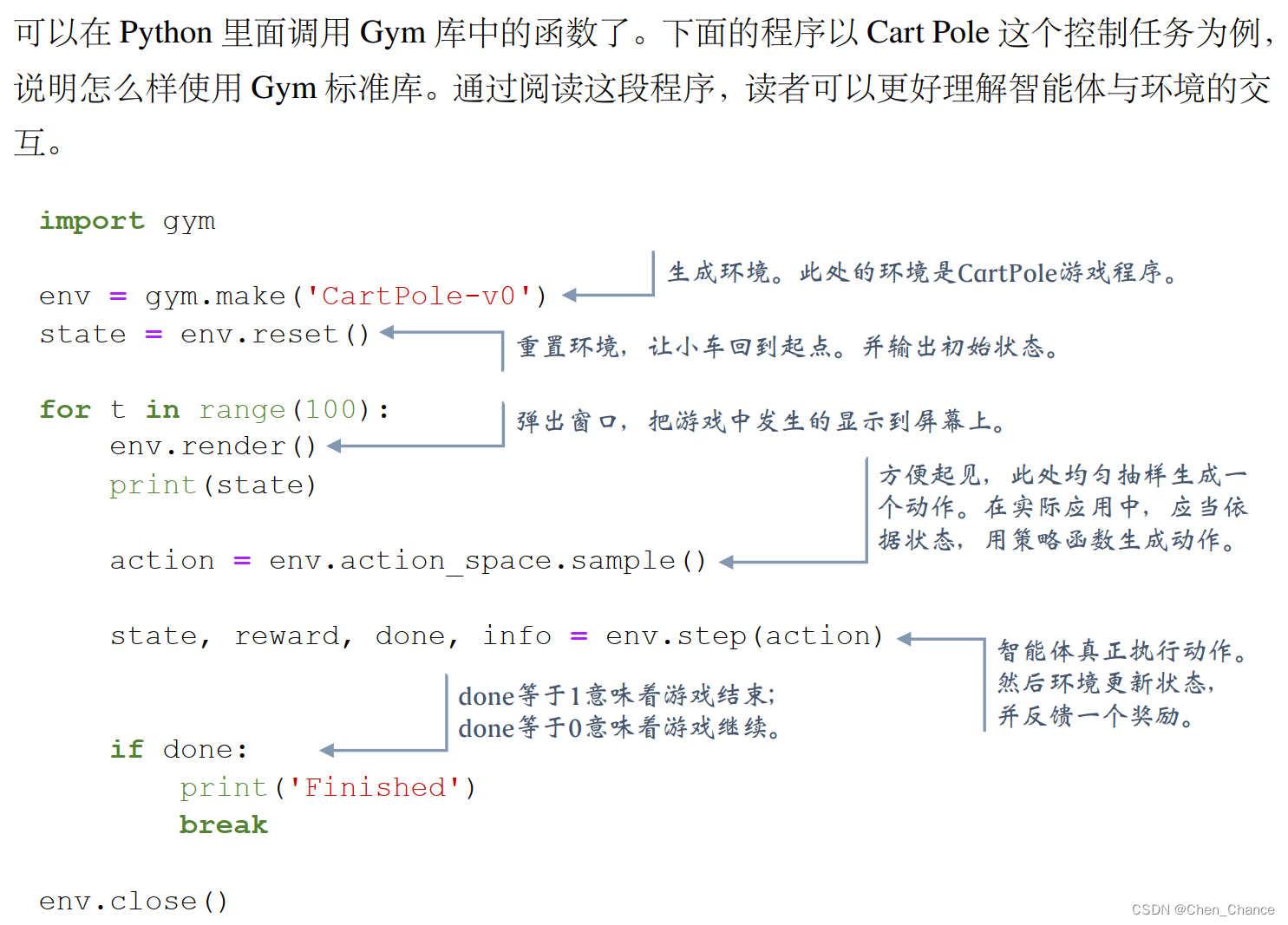
如果你设计出一种新的强化学习方法,你应该将其与已有的标准方法做比较,看新的方法是否有优势。比较和评价强化学习算法最常用的是 OpenAI Gym,它相当于计算机视觉中的 ImageNet 数据集。 Gym 有几大类控制问题,比如经典控制问题、 Atari 游戏、机器人。
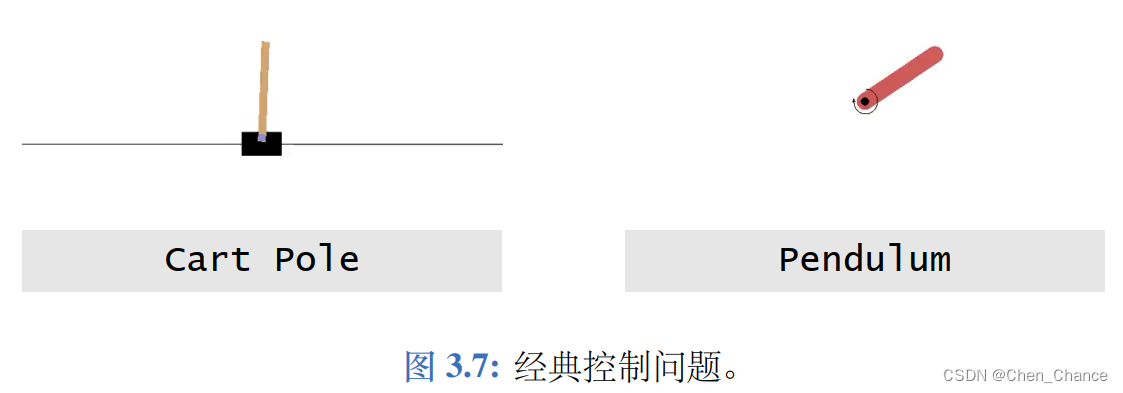
- Gym 中第一类是经典控制问题,都是小规模的简单问题,比如 Cart Pole 和 Pendulum
Cart Pole 和 Pendulum 都是典型的无限期 MDP,即不存在终止状态。
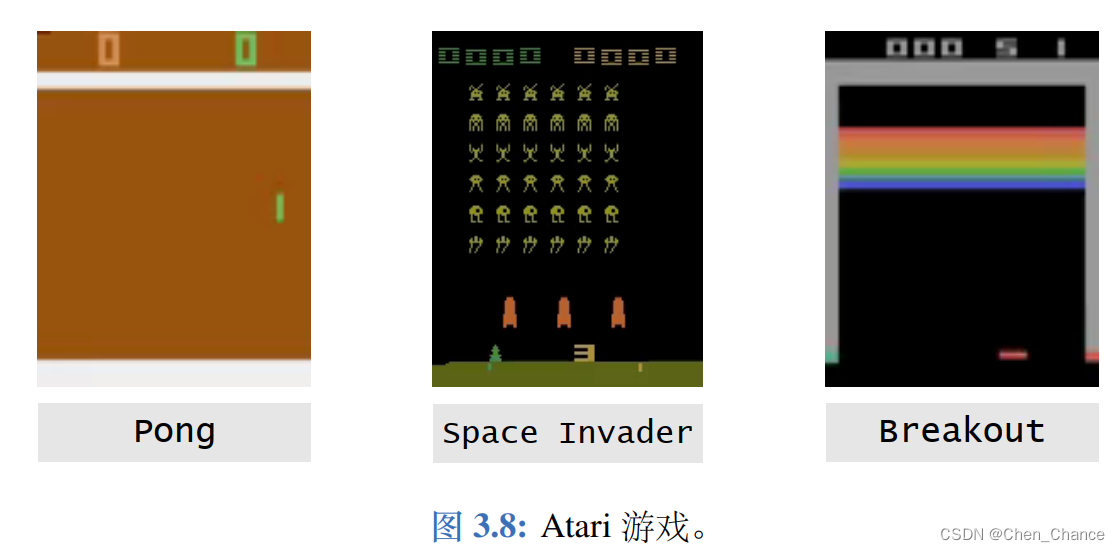
- 第二类问题是 Atari 游戏,就是八、九十年代小霸王游戏机上拿手柄玩的那种游戏
Atari 游戏大多是有限期 MDP,即存在一个终止状态,一旦进入该状态,则游戏会终止。
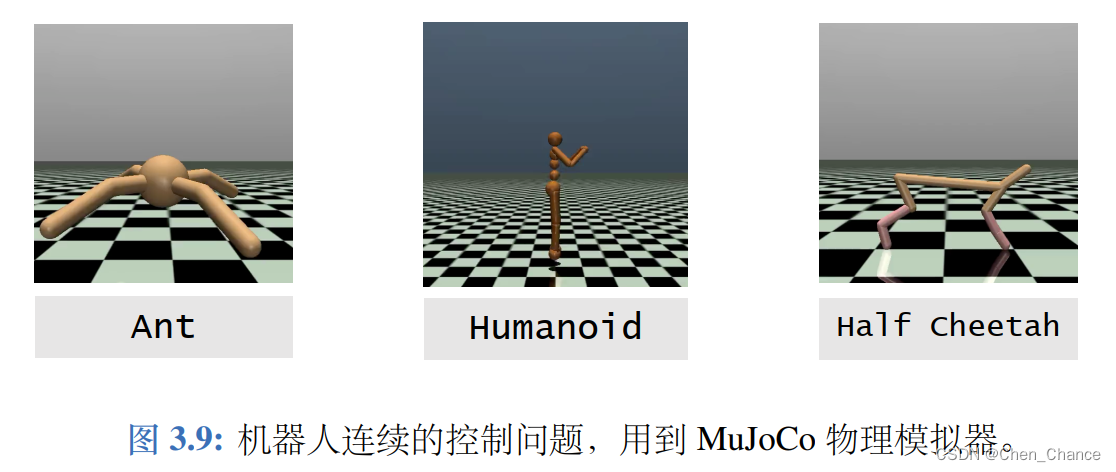
- 第三类问题是机器人连续的控制问题,比如控制蚂蚁、人、猎豹等机器人走路