💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
【图像误差测量】测量 2 张图像之间的差异,并测量图像质量
图像误差测量是一项重要的研究领域,旨在开发有效的方法来量化和评估图像之间的差异。这些差异可以来自于图像处理、压缩、传输或其他图像处理过程中的各种因素。
在图像处理领域,准确地测量图像之间的误差是评估算法效果和优化算法的关键。通过比较原始图像和经过处理后的图像,可以确定图像处理算法对图像所做的修改,并评估其对图像质量的影响。
常用的图像误差测量方法包括:
- 均方误差 (MSE):计算两幅图像的像素之间差值的平方的平均值。较大的MSE值表示较大的差异。
- 峰值信噪比 (PSNR):通过比较两幅图像的动态范围和均方误差来评估图像质量。PSNR值越高,表示图像质量越好。
- 结构相似性指数 (SSIM):通过比较图像的亮度、对比度和结构信息等方面的相似性来评估图像的质量。较高的SSIM值表示较高的相似性。
- 互信息 (MI):衡量两幅图像之间的信息重叠程度。较高的互信息值表示较高的相似性。
- 泊松噪声比 (PNR):通过估计图像中的噪声和估计信号之间的比值来评估图像质量。较高的PNR值表示较好的图像质量。
另外,随着深度学习和人工智能的发展,还涌现出一些基于神经网络的图像误差测量方法,如基于卷积神经网络 (CNN) 的结构相似度指数 (CNN-SSIM) 和感知损失 (Perceptual Loss) 等。
图像误差测量的研究旨在改进现有的方法,并开发新的有效算法来更准确地评估图像之间的差异。这些研究对于图像处理任务如图像复原、超分辨率、图像压缩和图像质量评估等具有重要的实际应用价值。通过深入研究图像误差测量,我们可以更好地理解图像的特性,并为相关领域的进一步发展提供指导和支持。
本文旨在测量两张图像之间的差异并评估图像质量。以下是常用的几种图像误差测量方法:
1. 均方误差 (MSE):计算两张图像像素之间差值的平方的平均值。这个指标越小,表示两张图像越相似。
2. 均方根误差 (RMSE):将均方误差的结果开方,以得到具有与原始像素单位一致的测量值。
3. 峰值信噪比 (PSNR):通过比较两张图像的动态范围和均方误差来衡量图像质量。这个指标的值越高,表示两张图像之间的差异越小,图像质量越高。
4. 平均绝对误差 (MAE):计算两张图像像素之间差值的绝对值的平均值。与均方误差不同,MAE更加关注图像中的小差异。
5. 信噪比 (SNR):通过比较图像中有用信号的强度与噪声的强度来评估图像的质量。一个较高的信噪比表示图像中有较少的噪声干扰。
6. 通用图像质量指数 (IQI):综合考虑了图像的亮度、对比度、锐度和颜色等方面的信息,以评估图像的整体质量。
7. 增强测量误差 (EME):通过将图像的增强后版本与原始版本进行比较,来衡量图像的质量提升程度。
8. 皮尔逊相关系数:衡量两张图像之间的线性相关性。当相关系数接近于1时,表示两张图像高度相关;当接近于0时,表示两张图像不相关。
通过使用这些图像误差测量方法,我们可以客观地评估图像之间的差异并量化图像质量。这些指标对于图像处理和图像质量控制非常重要,可以帮助我们优化和改进图像处理算法,并提供更好的视觉体验。
📚2 运行结果

部分代码:
noiseTypeModes = {'gaussian', % [1]'salt & pepper', % [2] 'localvar', % [3]'speckle', % [4] (multiplicative noise)'poisson', % [5]'motion blur', % [6]'erosion', % [7]'dilation', % [8]% 'jpg compression blocking effect' % [9]% [10] Interpolation/ resizing noise <to do>};noiseChosen = 2;
noiseTypeChosen = char(noiseTypeModes(noiseChosen));originalImage = uint8(IMG);%% plot original
titleStr = 'Original';imagePlot( originalImage, plotRowSize, plotColSize, ...plotIndex, titleStr );
plotIndex = plotIndex + 1;%%
for i = 1:(plotRowSize*plotColSize)-1IMG_aforeUpdated = double(IMG); % backup the previous state just in case it gets updated.% returns the noise param updates for further corruption
% IMG may be updated as the noisy image for the next round
[IMG, noisyImage, titleStr, sigma, dilationFilterSize, erosionFilterSize] = ...noisyImageGeneration(IMG, mean, sigma, offset, dilationFilterSize, erosionFilterSize, noiseTypeChosen);imageQualityIndex_Value = imageQualityIndex(double(originalImage), double(noisyImage));titleStr = [titleStr ',' newline 'IQI: ' num2str(imageQualityIndex_Value)];imagePlot( noisyImage, plotRowSize, plotColSize, ...plotIndex, titleStr );
plotIndex = plotIndex + 1;endif (~strcmp(char(class(noisyImage)), 'uint8'))disp('noisyImage is NOT type: uint8');
end%% PSNR
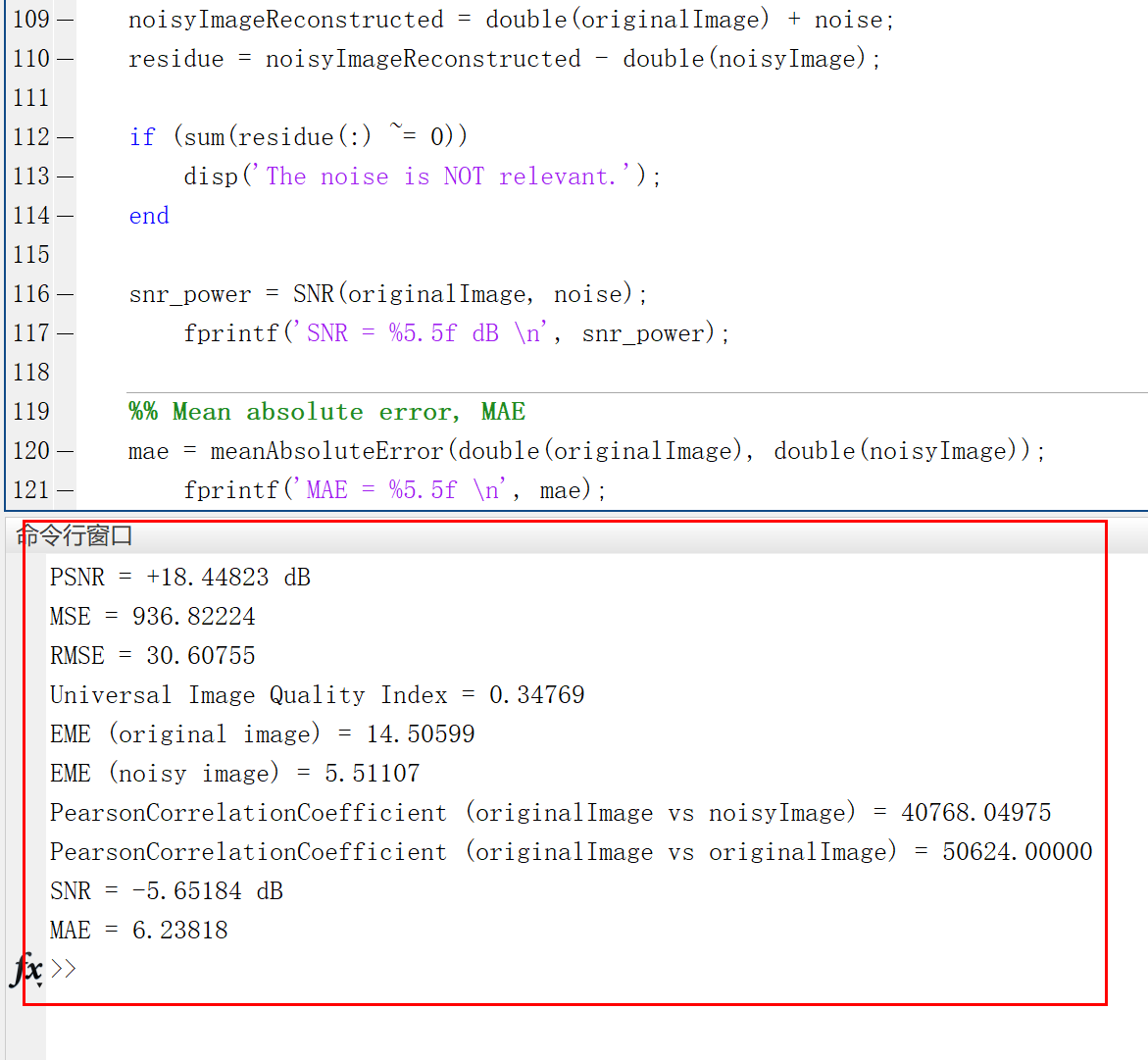
psnr_Value = PSNR(originalImage, noisyImage);fprintf('PSNR = +%5.5f dB \n', psnr_Value);
%% RMSE
[mse, rmse] = RMSE2(double(originalImage), double(noisyImage));fprintf('MSE = %5.5f \n', mse);fprintf('RMSE = %5.5f \n', rmse);
%% Universal Quality Index
imageQualityIndex_Value = imageQualityIndex(double(originalImage), double(noisyImage));fprintf('Universal Image Quality Index = %5.5f \n', imageQualityIndex_Value);
%% Enhancement : measure of enhance- ment, or measure of improvement
[M M] = size(originalImage);
L = 8;
EME_original = eme(double(originalImage),M,L);
EME_noisyImage = eme(double(noisyImage),M,L);fprintf('EME (original image) = %5.5f \n', EME_original);fprintf('EME (noisy image) = %5.5f \n', EME_noisyImage);
%% PearsonCorrelationCoefficient
pcc = compute_PearsonCorrelationCoefficient (double(originalImage), double(noisyImage));fprintf('PearsonCorrelationCoefficient (originalImage vs noisyImage) = %5.5f \n', pcc);
pcc = compute_PearsonCorrelationCoefficient (double(originalImage), double(originalImage));fprintf('PearsonCorrelationCoefficient (originalImage vs originalImage) = %5.5f \n', pcc);%% Signal to signal noise ratio, SNR
noise = double(noisyImage) - double(originalImage); % assume additive noise% check noise
noisyImageReconstructed = double(originalImage) + noise;
residue = noisyImageReconstructed - double(noisyImage);if (sum(residue(:) ~= 0))disp('The noise is NOT relevant.');
endsnr_power = SNR(originalImage, noise);fprintf('SNR = %5.5f dB \n', snr_power);%% Mean absolute error, MAE
mae = meanAbsoluteError(double(originalImage), double(noisyImage));fprintf('MAE = %5.5f \n', mae);noiseTypeModes = {
'gaussian', % [1]
'salt & pepper', % [2]
'localvar', % [3]
'speckle', % [4] (multiplicative noise)
'poisson', % [5]
'motion blur', % [6]
'erosion', % [7]
'dilation', % [8]
% 'jpg compression blocking effect' % [9]
% [10] Interpolation/ resizing noise <to do>
};
noiseChosen = 2;
noiseTypeChosen = char(noiseTypeModes(noiseChosen));
originalImage = uint8(IMG);
%% plot original
titleStr = 'Original';
imagePlot( originalImage, plotRowSize, plotColSize, ...
plotIndex, titleStr );
plotIndex = plotIndex + 1;
%%
for i = 1:(plotRowSize*plotColSize)-1
IMG_aforeUpdated = double(IMG); % backup the previous state just in case it gets updated.
% returns the noise param updates for further corruption
% IMG may be updated as the noisy image for the next round
[IMG, noisyImage, titleStr, sigma, dilationFilterSize, erosionFilterSize] = ...
noisyImageGeneration(IMG, mean, sigma, offset, dilationFilterSize, erosionFilterSize, noiseTypeChosen);
imageQualityIndex_Value = imageQualityIndex(double(originalImage), double(noisyImage));
titleStr = [titleStr ',' newline 'IQI: ' num2str(imageQualityIndex_Value)];
imagePlot( noisyImage, plotRowSize, plotColSize, ...
plotIndex, titleStr );
plotIndex = plotIndex + 1;
end
if (~strcmp(char(class(noisyImage)), 'uint8'))
disp('noisyImage is NOT type: uint8');
end
%% PSNR
psnr_Value = PSNR(originalImage, noisyImage);
fprintf('PSNR = +%5.5f dB \n', psnr_Value);
%% RMSE
[mse, rmse] = RMSE2(double(originalImage), double(noisyImage));
fprintf('MSE = %5.5f \n', mse);
fprintf('RMSE = %5.5f \n', rmse);
%% Universal Quality Index
imageQualityIndex_Value = imageQualityIndex(double(originalImage), double(noisyImage));
fprintf('Universal Image Quality Index = %5.5f \n', imageQualityIndex_Value);
%% Enhancement : measure of enhance- ment, or measure of improvement
[M M] = size(originalImage);
L = 8;
EME_original = eme(double(originalImage),M,L);
EME_noisyImage = eme(double(noisyImage),M,L);
fprintf('EME (original image) = %5.5f \n', EME_original);
fprintf('EME (noisy image) = %5.5f \n', EME_noisyImage);
%% PearsonCorrelationCoefficient
pcc = compute_PearsonCorrelationCoefficient (double(originalImage), double(noisyImage));
fprintf('PearsonCorrelationCoefficient (originalImage vs noisyImage) = %5.5f \n', pcc);
pcc = compute_PearsonCorrelationCoefficient (double(originalImage), double(originalImage));
fprintf('PearsonCorrelationCoefficient (originalImage vs originalImage) = %5.5f \n', pcc);
%% Signal to signal noise ratio, SNR
noise = double(noisyImage) - double(originalImage); % assume additive noise
% check noise
noisyImageReconstructed = double(originalImage) + noise;
residue = noisyImageReconstructed - double(noisyImage);
if (sum(residue(:) ~= 0))
disp('The noise is NOT relevant.');
end
snr_power = SNR(originalImage, noise);
fprintf('SNR = %5.5f dB \n', snr_power);
%% Mean absolute error, MAE
mae = meanAbsoluteError(double(originalImage), double(noisyImage));
fprintf('MAE = %5.5f \n', mae);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]路慧娟.影像测量误差实验估计[D].西安体育学院[2023-09-21].DOI:10.7666/d.d142172.
[2]康立丽,林意群,林木炎.MR信噪比一幅图像测量方法与两幅图像测量方法对照研究[J].北京生物医学工程, 2004, 23(1):4.DOI:10.3969/j.issn.1002-3208.2004.01.002.
[3]吴晓波,安文斗.图像测量系统中的误差分析及提高测量精度的途径[J].光学精密工程, 1997, 5(1):12.DOI:CNKI:SUN:GXJM.0.1997-01-022.
[4]廖强华,钟江生.基于图像处理的光纤阵列误差测量[J].计算机工程, 2006, 32(10):3.DOI:10.3969/j.issn.1000-3428.2006.10.097.