Only for the Test 1 which include 4.2 4.3 4.4
Locomotion and Kinematics 运动和运动学
(4.2) Part 2: Wheeled Motion
1. Wheeled Robots
a. 省略控制双腿需要的计算复杂度
b. 只限于easy terrain (地形)
c. 不平坦uneven 不规则irregular 的地形需要很多计算
d. 轮子的选择根据应用的需要决定
2. Four basic wheel types
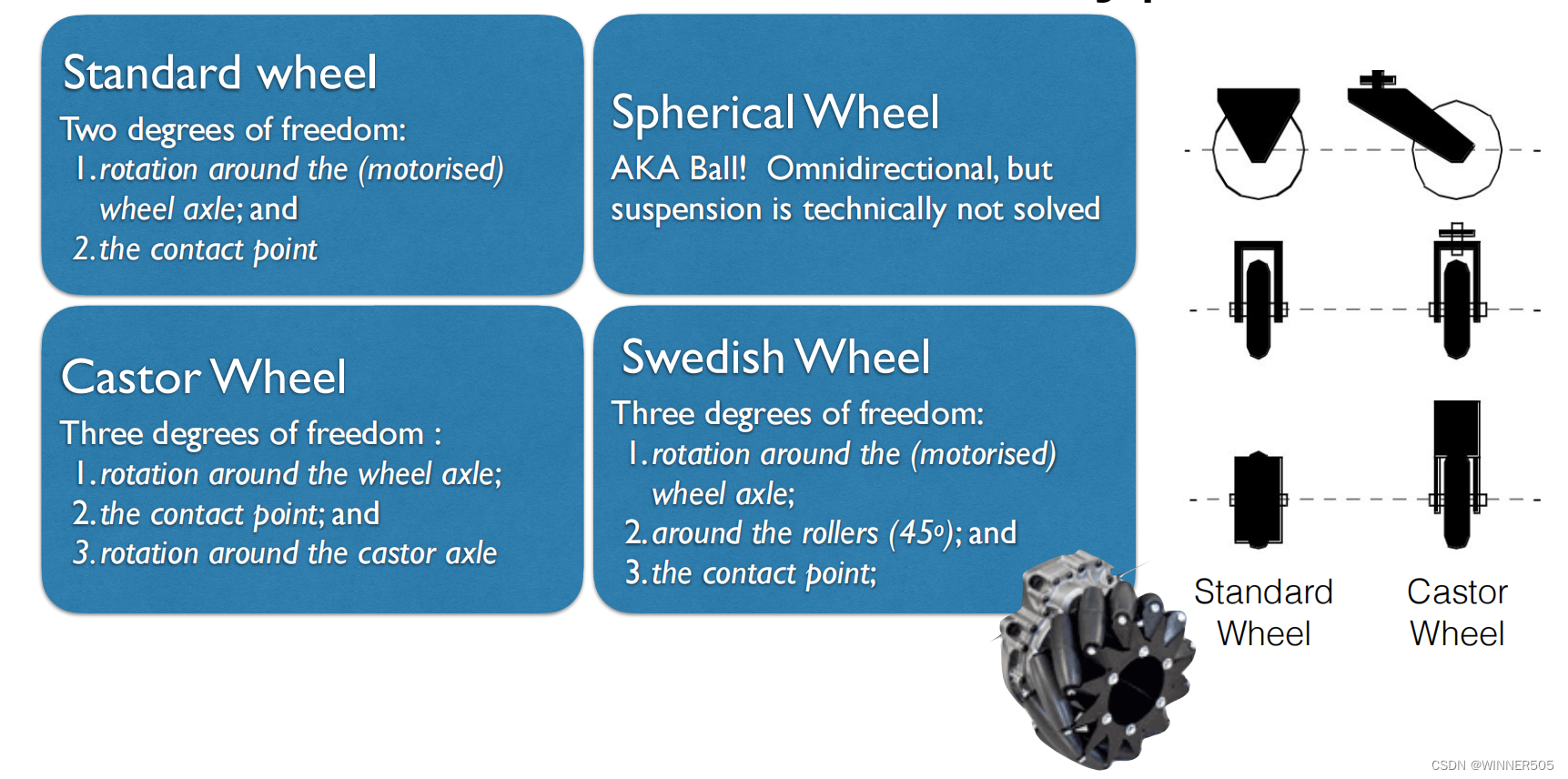
3. Features / characteristics
a. Stability of a vehicle is be guaranteed with 3 wheels . 机器人的稳定性需要三个轮子来保证
b. Stability is improved by 4 and more wheels
c. However, such arrangements with more thanthree contact points are hyperstatic 超固定的 and requirea flexible suspension system 灵活的悬挂系统.
d. Bigger wheels allow robot to overcome higher obstacles .
e. Combining actuation 驱动 and steering 转向 on one wheel makesthe design complex and adds additional errors forodometry
f. 计算速度 v = 2 r * w/2 = wr
r * w/2 = wr
g. Four wheels
1. 高机动性 难控制
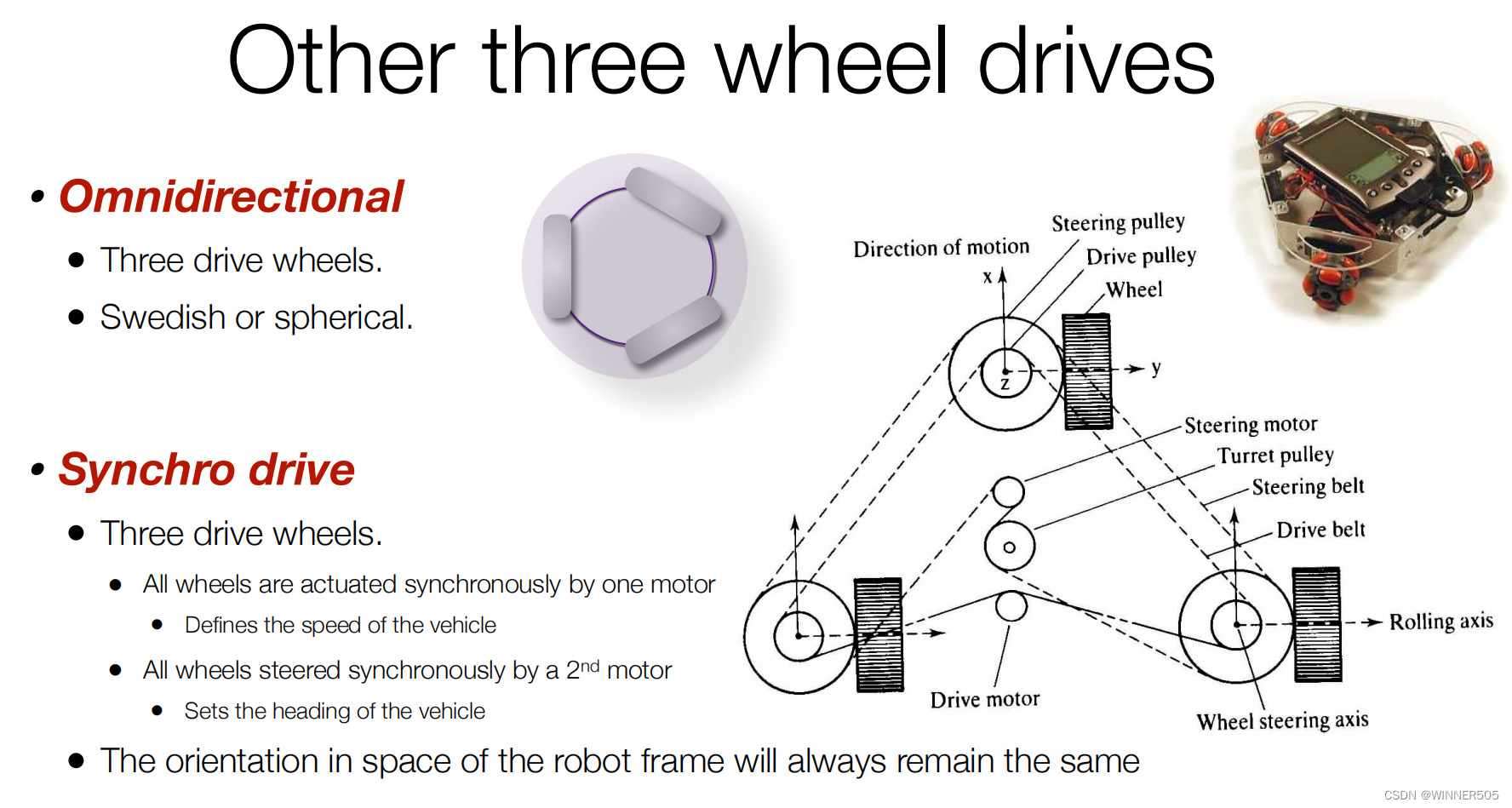
h. Three wheels
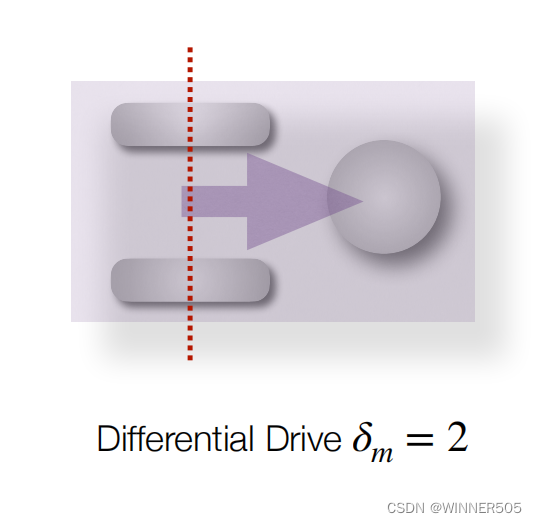
1. Differential drive 差速器驱动器 plus caster 脚轮 or omnidirectional wheel.
Highly manoeuvrable, but limited to moving forwards/ backwards and rotating 高机动性,但仅限制于向前、向后和转向
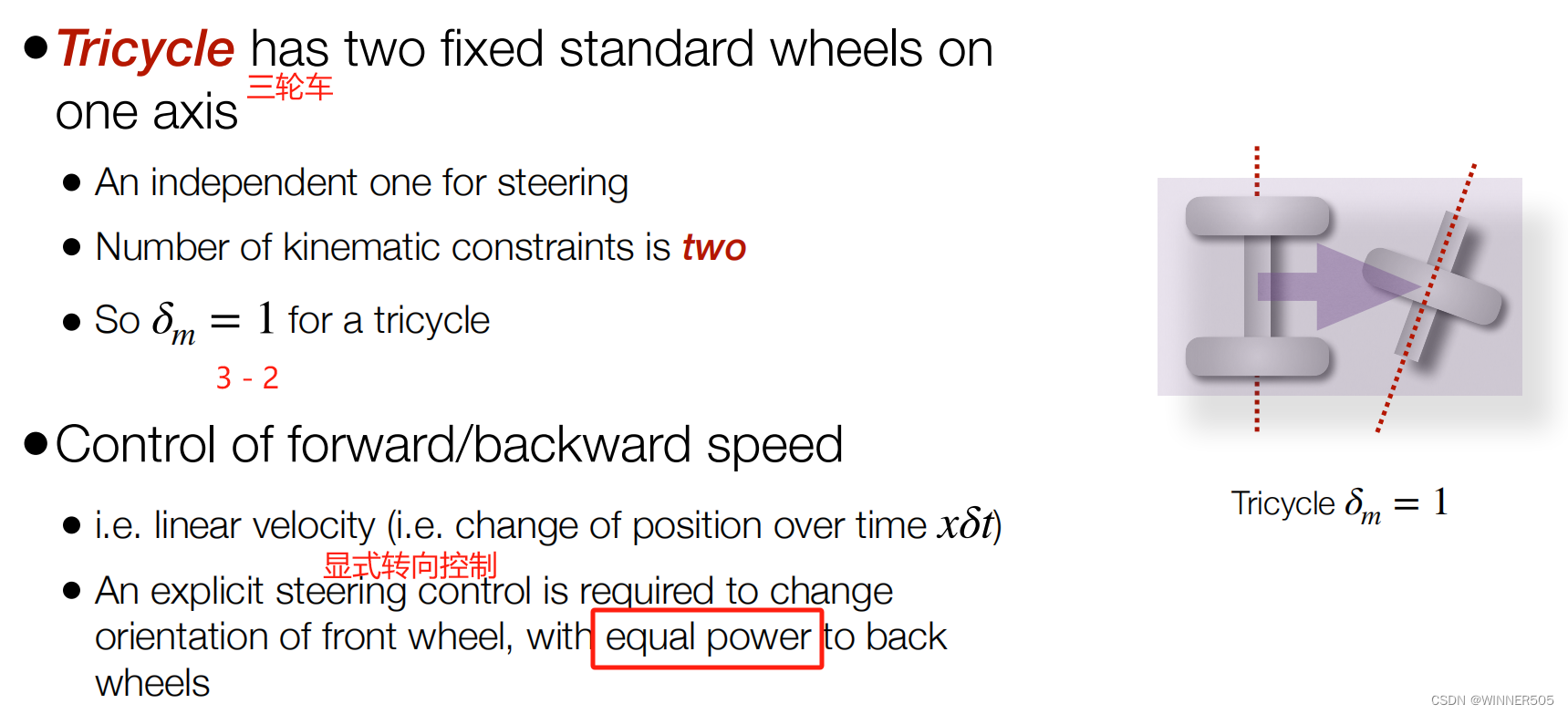
2. Connected drive wheels at rear, steered wheel at front 前面是转向轮,后面是驱动轮
3. Two free wheels in rear, steered drive wheel in front. 后轮是自由的, 前轮是需要操纵的
(4.3)Part 3: Two wheeled Vehicles and Manoeuvrability
1. Two Wheels
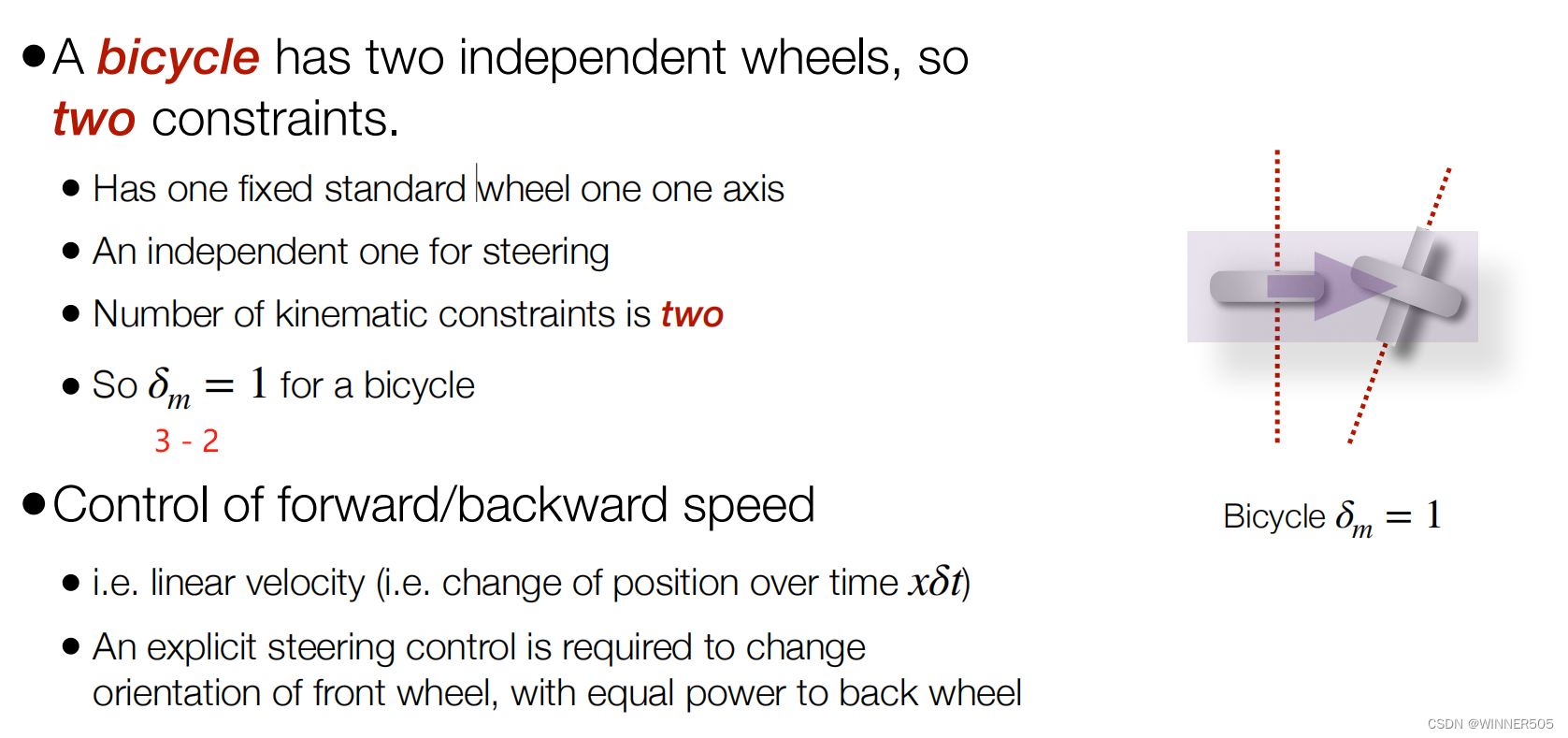
Steering wheel at front, drive wheel at back.
Stability issues, not that common
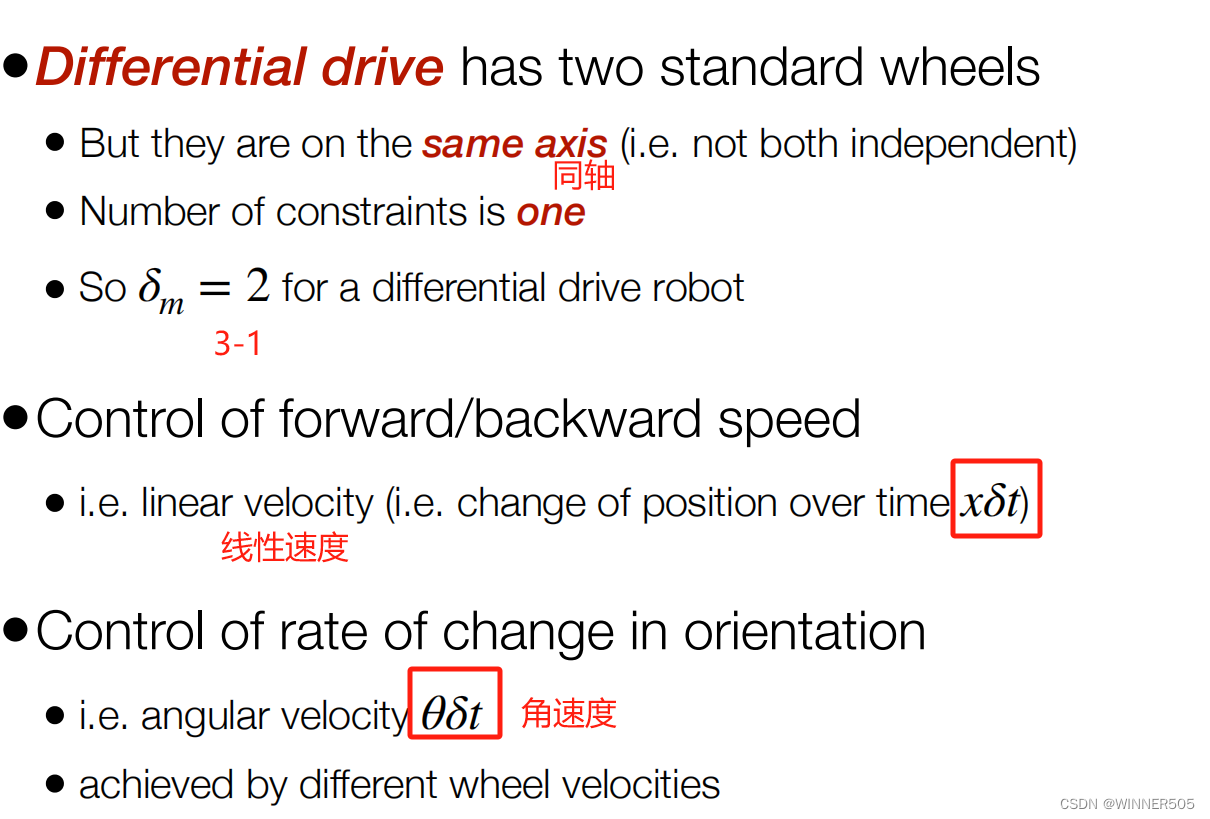
Differential drive
Turning achieved by varying the individual velocity / speed of each wheel
转向通过改变单个轮胎的速度来实现
Centre of mass above or below axle
Highly manoeuvrable, but limited to moving forwards/ backwards and rotating 高机动性,但仅限制于向前、向后和转向
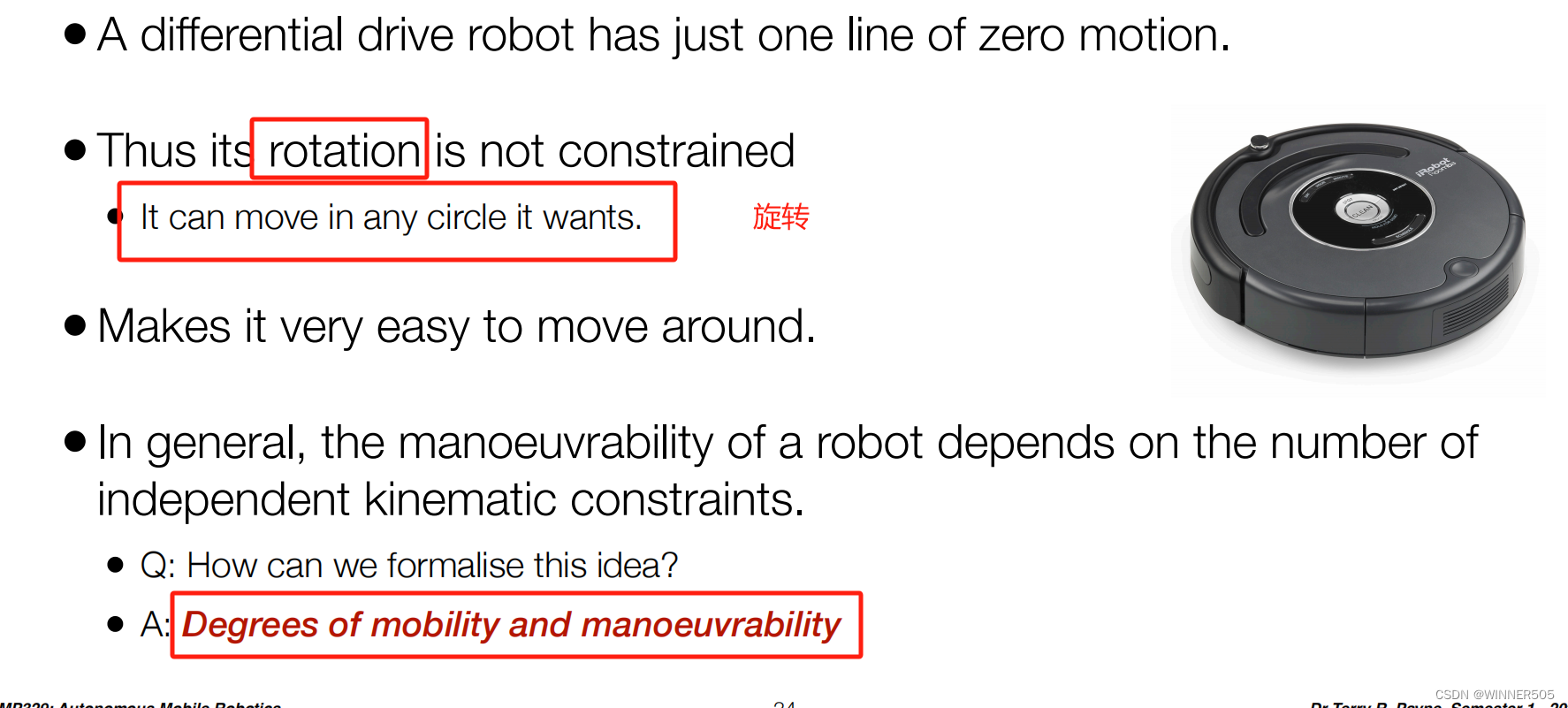 2. Degree of mobility
2. Degree of mobility
the number of independent fixed or steerable standard wheels
简而言之,就是独立固定的或者是可操纵的轮胎
例子1:differential drive 什么差速器
例子2:tricycle 三轮车
例子3:bicycle 自行车
3. Mobility vs Steerability
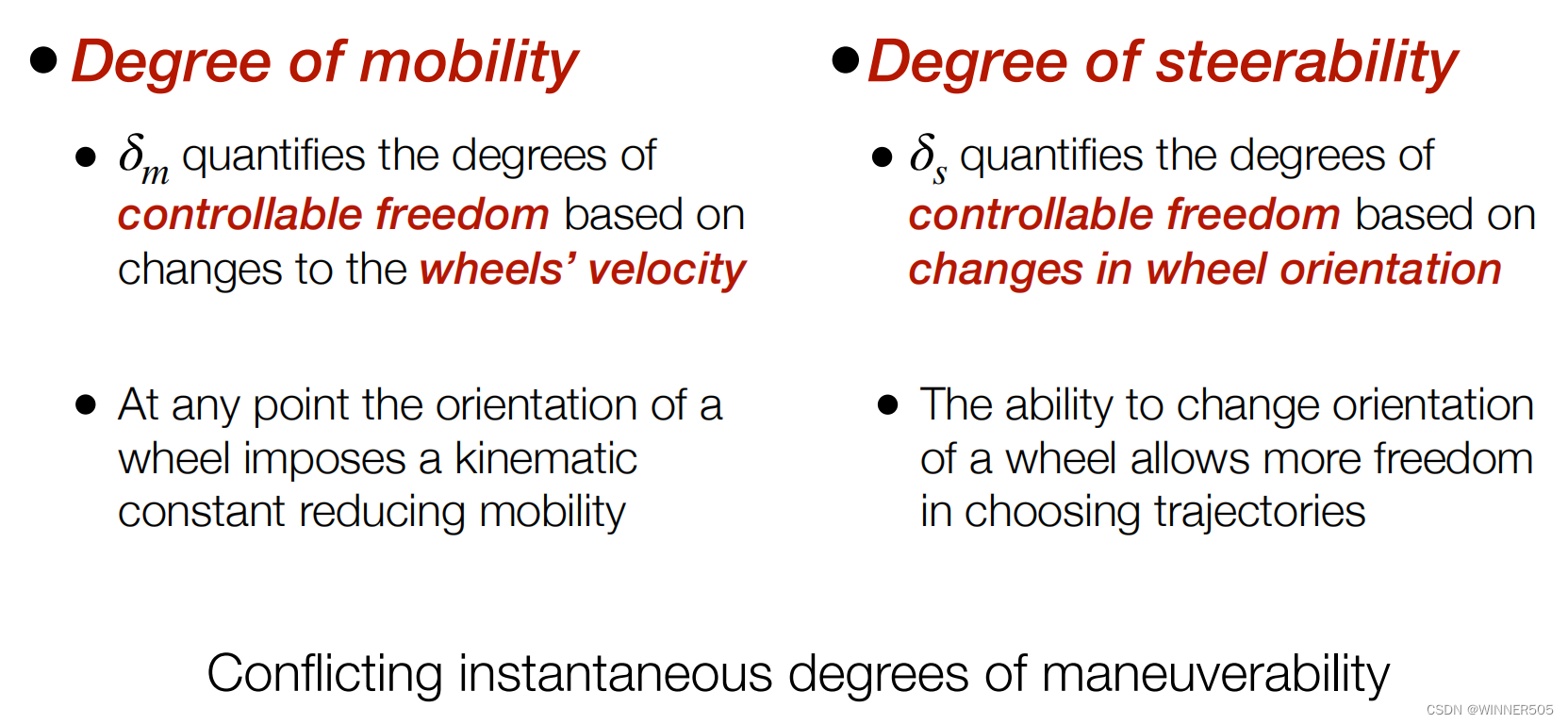
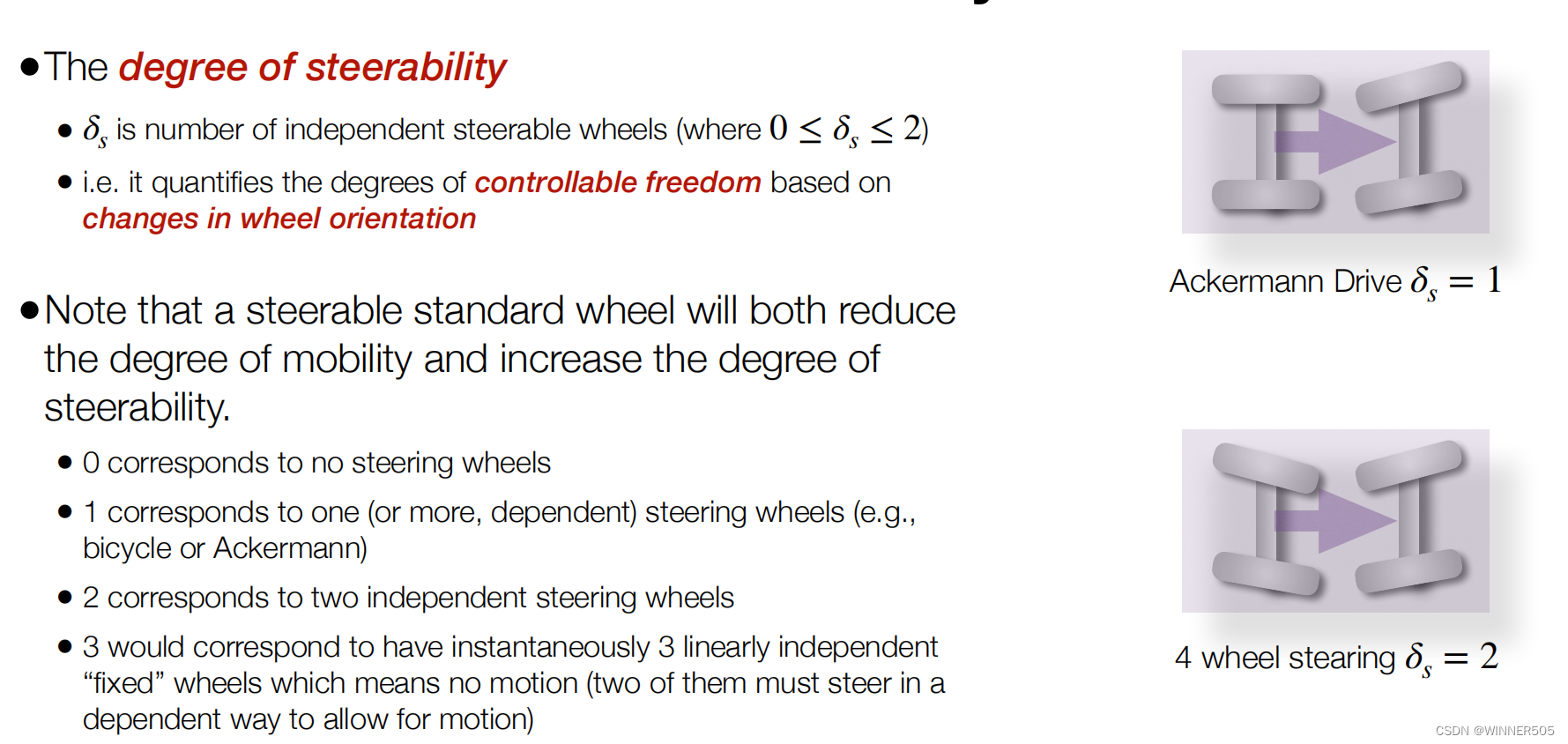
4. Degree of Steerability
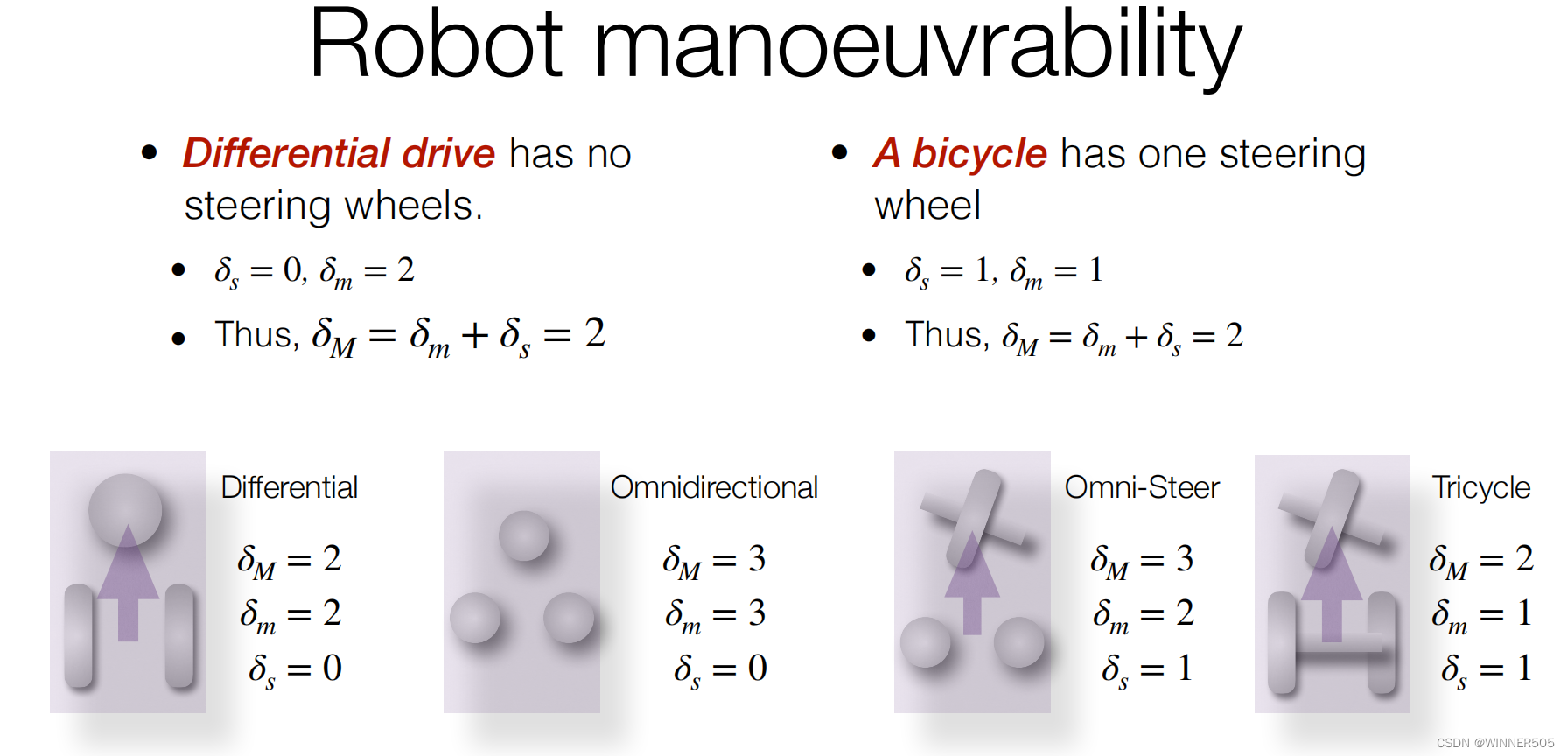
5. Degree of Manoeuvrability
机器人可以通过改变车轮的速度(直接移动)和车轮的方向(间接移动)来操纵的整体自由度
两个具有相同 manoeuvrability 特性的机器人并不一定是相等的,但由于可移动性或可操纵性,它们可以以不同的方式进行操纵
6. Non-Holonomic Constraints 非人体工程学约束
(4.4)Part 4 Kinematics of Differential Drives
So far we have looked at different kinds of motion in a qualitative way
• One way to program robots to move is trial and error 试错法 反复实验
1.定义:
A somewhat better way is to establish mathematically how the robot should move, this is kinematics
• Rather kinematics is the business of figuring how a robot will move if it’s motors work in a given way.
运动学的任务是计算如果机器人的马达在特定的方式工作,它将如何移动
固定马达----计算移动
• Inverse-kinematics then tells us how to move the motors to get the robot to do what we want.
然后,逆运动学告诉我们如何移动马达来让机器人去做我们想做的事情
改变马达-----促使移动
没有横向移动条件下的转向
31 / 54 明天在学 学闷了