部署潜水员进行水下摄像,不仅难度高而且费用昂贵,需要受过潜水和摄像两方面培训的专业人员来进行。但有些水下作业任务例如拍摄海底管道内部的照片,由于人员无法进入或危险度高的原因,无法由潜水员完成。
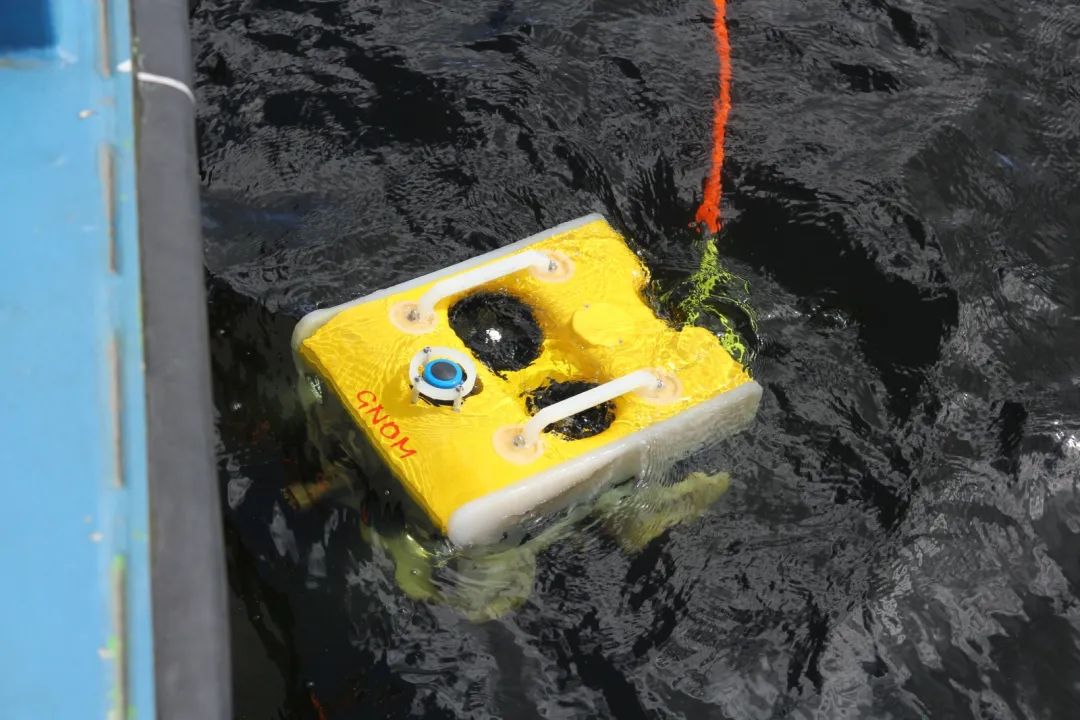
如今,俄罗斯水下机器人制造商 - Underwater Robotics开发出了一种遥控水下机器人(ROV),它可以在操作员的控制下执行水下拍摄任务,而操作员则可以安全地呆在水面上。Underwater Robotics公司的GNOM-PRO是世界上最小最轻的遥控潜水器,专为视频拍摄任务而设计,用户无需潜水员就能执行水下目视检查任务。它还能安全地查看水下的小型或危险地点。

这款水下机器人具有出色的水下动态特性,只需使用操纵杆便可控制其运动。机器人具有良好的稳定性和易用性,其中的关键在于Xsens的3D运动传感器。
完整的运动跟踪模块,提升ROV研发速度
Xsens的MTi-3是一个完整的AHRS(姿态和航向参考系统),包含陀螺仪、加速度计和磁力计,模块尺寸为12.1 x 12.1毫米。MTi-3具有Xsens在业界领先的传感器融合算法,该算法可在传感器使用寿命内保持高精度,并执行传感器自动校准。集成Xsens模块的使用让Underwater Robotics能够快速开发GNOM-PRO的运动控制系统。该模块计算出的滚动、俯仰和航向测量值也很容易集成到GNOM-PRO的控制软件中。

在为GNOM-PRO选择运动传感器时,Underwater Robotics仔细考量了传感器的尺寸和重量。该遥控潜水器的一个重要特点是可以手提:包括遥控潜水器和配套的长达400米的系绳在内,整个系统可以装在两个手提箱中。遥控潜水器本身的尺寸为520mm x 440mm x 347mm,重25kg,这意味着它可以很容易地运输到执行任务的地点,几乎可以从任何类型的船上发射和操作。其小巧的体积还意味着它可以在管道等狭窄的空间中使用,而传统的遥控潜水器无法进入这些空间。
MTi-3传感器体积小、重量轻(不到1克),因此极具吸引力。但Underwater Robotics之所以选择MTi-3,是看中了传感器的动态特性。GNOM-PRO用于监测和维护海洋及水下设施,例如石油生产平台、水力发电厂、检查船体,以及监测核电站等危险场所。将其用作摄像机平台需要很高的动态稳定性,以确保视频图像不会受到模糊、抖动或其他图像伪影的影响。
在水中保持稳定
GNOM-PRO体积小重量轻,这意味着它受海浪和水流运动的影响比大型设备要多。MTi-3的高性能,包括静态条件下±0.5°(动态条件下±0.8°)的滚动和俯仰精度,使操作员能够保持稳定的方向。GNOM-PRO还具有自动航向模式,使操作员能够通过MTi-3的航向输出控制的自动设置来设定行进方向。此外,MTi-3传感器对速度、滚动、俯仰和偏航的测量能够从已知的起始位置进行精确推算,从而确定ROV的地理位置。

Underwater Robotics在对运动传感器市场进行详尽评估后,决定在GNOM-PRO ROV中使用MTi-3。
Underwater Robotics首席执行官Boris Rozman表示:“在我们认为重要的每个参数上,我们的评估都指向MTi运动跟踪器。这是一款包括传感器融合软件在内的全功能运动跟踪仪,但Xsens将所有功能都集成到了一个小巧轻便的包装中,这对于像GNOM-PRO这样的便携式产品来说非常重要。但体积小并不影响性能,MTi-3的测量精度非常高,再加上独立压力传感器提供的深度测量,用户可以为每一帧视频标注准确的地理位置。
配备MTi-3传感器的GNOM-PRO ROV的性能为我们带来了巨大的成功,该产品目前已在全球多个国家使用,包括法国、意大利、德国、西班牙、美国、印度以及俄罗斯。这就是为什么我确信使用MTi-3的决定是正确的。”