Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长
在正式开启今天的学习前,讲一讲为什么标题中加入了【主动】俩字。之前学习的阻塞和非阻塞IO,都是在被动的接受应用程序的操作。而今天的学习的异步通知则是驱动程序自动的去上报自己的状态,类似于以前我们学习的中断机制。
谈到【主动】,和大家共勉一句话:凡事先干起来,就能消除90%的焦虑。当我第一次看到这句话的时候,突然有种豁然开朗的感觉。往往大家都是在托腮忧虑自己想象中的困难而久久不知所措而停止行动。殊不知,我们自己想象中的大部分困难也只存在于我们的想象中。当着手开始行动时,你会发现,也许并不难。
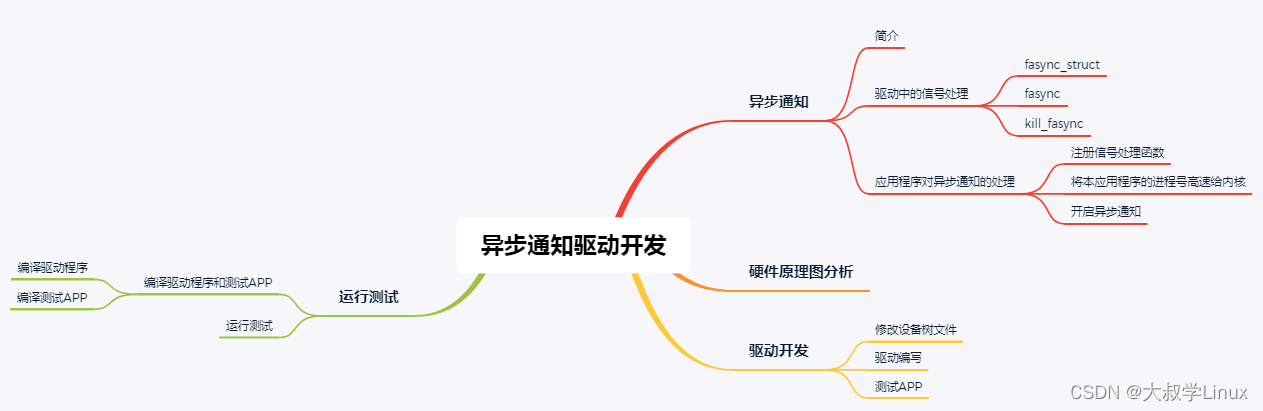
本篇笔记主要学习了嵌入式Linux异步通知驱动开发相关知识,主要内容包括异步通知的相关概念及驱动开发的过程。其中异步通知又包括异步通知简介、驱动中的信号处理以及应用程序对异步通知的处理。驱动开发包括设备树的修改、驱动开发及测试。其中驱动开发是本节重点需要关注的内容。
本篇笔记的思维导图如下:
一、异步通知
关键字:主动 中断
1.异步通知简介
关键字:信号
在应用程序中使用 signal 函数来设置指定信号的处理函数.
sighandler_t signal(int signum, sighandler_t handler)signum:要设置处理函数的信号。
handler: 信号的处理函数。
返回值: 设置成功的话返回信号的前一个处理函数,设置失败的话返回 SIG_ERR。
2.驱动中的信号处理
1)、fasync_struct
struct fasync_struct {
spinlock_t fa_lock;
int magic;
int fa_fd;
struct fasync_struct *fa_next;
struct file *fa_file;
struct rcu_head fa_rcu;
};一般将 fasync_struct 结构体指针变量定义到设备结构体中。
2)、fasync函数
int (*fasync) (int fd, struct file *filp, int on)int fasync_helper(int fd, struct file * filp, int on, struct fasync_struct **fapp)当应用程序通过“fcntl(fd, F_SETFL, flags | FASYNC)”改变fasync 标记的时候,驱动程序 file_operations 操作集中的 fasync 函数就会执行。
在关闭驱动文件的时候需要在 file_operations 操作集中的 release 函数中释放 fasync_struct,fasync_struct 的释放函数同样为 fasync_helper。
3)、kill_fasync
负责发送指定的信号。函数的原型如下:
void kill_fasync(struct fasync_struct **fp, int sig, int band)fp:要操作的 fasync_struct。
sig: 要发送的信号。
band: 可读时设置为 POLL_IN,可写时设置为 POLL_OUT。
3.应用程序对异步通知的处理
1)、注册信号处理函数
2)、将本应用程序的进程号告诉给内核
fcntl(fd, F_SETOWN, getpid())3)、开启异步通知
flags = fcntl(fd, F_GETFL); /* 获取当前的进程状态 */
fcntl(fd, F_SETFL, flags | FASYNC); /* 开启当前进程异步通知功能 */二、硬件原理图分析
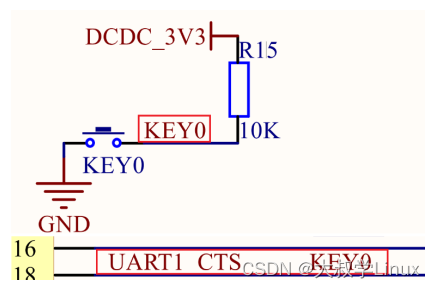
三、应用程序编写
1.修改设备树文件
2.程序编写
#include <linux/fcntl.h>//因为要用到相关的 API 函数。struct fasync_struct *async_queue; /* 设备结构体中加入异步相关结构体 */109 if(atomic_read(&dev->releasekey)) { /* 一次完整的按键过程 */
110 if(dev->async_queue)
111 kill_fasync(&dev->async_queue, SIGIO, POLL_IN);
112 }如果是一次完整的按键过程,那么就通过 kill_fasync 函数发送 SIGIO 信号。
269 static int imx6uirq_fasync(int fd, struct file *filp, int on)
270 {
271 struct imx6uirq_dev *dev = (struct imx6uirq_dev *)
filp->private_data;
272 return fasync_helper(fd, filp, on, &dev->async_queue);
273 }imx6uirq_fasync 函数,为 file_operations 操作集中的 fasync 函数,此函数内容很简单,就是调用一下 fasync_helper。
281 static int imx6uirq_release(struct inode *inode, struct file *filp)
282 {
283 return imx6uirq_fasync(-1, filp, 0);
284 }release 函数,应用程序调用 close 函数关闭驱动设备文件的时候此函数就会执行,在此函数中释放掉 fasync_struct 指针变量。
292 .fasync = imx6uirq_fasync,
293 .release = imx6uirq_release,设置 file_operations 操作集中的 fasync 和 release 这两个成员变量。
3.编写测试APP
27 /*
28 * SIGIO 信号处理函数
29 * @param - signum : 信号值
30 * @return : 无
31 */
32 static void sigio_signal_func(int signum)
33 {
34 int err = 0;
35 unsigned int keyvalue = 0;
36
37 err = read(fd, &keyvalue, sizeof(keyvalue));
38 if(err < 0) {
39 /* 读取错误 */
40 } else {
41 printf("sigio signal! key value=%d\r\n", keyvalue);
42 }
43 }sigio_signal_func 函数, SIGIO 信号的处理函数,当驱动程序有效按键按下以后就会发送 SIGIO 信号,此函数就会执行。此函数通过 read 函数读取按键值,然后通过printf 函数打印在终端上。
signal(SIGIO, sigio_signal_func);通过 signal 函数设置 SIGIO 信号的处理函数为 sigio_signal_func。
71 fcntl(fd, F_SETOWN, getpid()); /* 将当前进程的进程号告诉给内核 */
72 flags = fcntl(fd, F_GETFD); /* 获取当前的进程状态 */
73 fcntl(fd, F_SETFL, flags | FASYNC);/* 设置进程启用异步通知功能 */设置当前进程的状态,开启异步通知的功能。
四、运行测试
1.编译驱动程序和测试APP
1)、编译驱动程序
obj-m := asyncnoti.omake -j32 asyncnoti.ko”的驱动模块
2)、编译测试APP
arm-linux-gnueabihf-gcc asyncnotiApp.c -o asyncnotiApp应用程序asyncnotiApp
2.运行测试
depmod //第一次加载驱动的时候需要运行此命令
modprobe asyncnoti.ko //加载驱动./asyncnotiApp /dev/asyncnoti按下开发板上的 KEY0 键,终端就会输出按键值。
五、总结
本篇笔记主要学习了嵌入式Linux异步通知驱动开发相关知识,主要内容包括异步通知的相关概念及驱动开发的过程。
本文为参考正点原子开发板配套教程整理而得,仅用于学习交流使用,不得用于商业用途。

![[UDS] --- ECUReset 0x11](https://img-blog.csdnimg.cn/05d167aee7054ab88ff565354ccda07a.png)